
基于广义互相关的时延估计算法研究*
2018-05-25 03:08屈晓旭娄景艺
通信技术 2018年5期
朱 超,屈晓旭,娄景艺
(海军工程大学 电子工程学院,湖北 武汉 430033)
0 引 言
时延作为用来表征信号特征的一个重要参数,随着信号处理技术的广泛应用,如何快速准确地获得信号的时延,成为信号分析与处理领域人们研究的热点问题。时延估计要解决的主要问题是对接收目标信号进行处理,准确快速地估计和测量接收信号之间因信号传播过程中通道的不同而引起的时间延迟[1]。目前,应用于时延估计的技术有广义互相关法、二次相关法、LMS自适应滤波器法、高阶累积量法和广义双谱法等[2],尽管以上算法原理有所不同,但是它们之间总存在信号相关性的成分。所以,研究广义互相关时延估计算法对需要处理时延的有关领域具有重要意义。由于广义相关时延估计算法简单、计算量小,其应用比较广泛。本文对广义互相关时延估计算法原理进行研究,并利用广义互相关时延估计算法的不同加权函数进行仿真比较,分析了其各自的优点与不足。
1 基本互相关的时延估计算法
互相关(CC)是用来比较两个信号或函数在时域相似程度的基本方法。时延估计的基本思想是利用两个接收信号的互相关函数来估计时间延迟[3]。时延估计算法可以通过以下两个信号模型来分析:信源发射信号s(t)经两个传输通道传输的过程中加入了伴有噪声的信号x1(t)和x2(t)。设信号x1(t)和x2(t)满足:
其中,A1和A2是发射信号的幅度参量,表示s(t)经不同通道传输后的幅度增益和相位偏移。n1(t)和n2(t)代表未知的加性平稳高斯白噪声,τ1和τ2表示信号传输的时延,且τ1≤τ2。为表达方便,以x1(t)为标准进行归一化,则式(1)可以重新表示为:

式(2)离散形式为:
其中λ=A2/A1,表示两个接收信号的幅值比;D=τ2-τ1,表示所求时延值。
x1(t)和x2(t)的互相关函数表示为:
假设n1(t)和n2(t)是独立于s(t)平稳不相关的高斯白噪声,则两个噪声n1(t)、n2(t)与信号s(t)的互相关函数为:

噪声n1(t)与n2(t)的互相关函数为:

则:

由自相关函数|RSS(τ)|≤Rss(0)的性质可知,当τ=D时,Rss(τ-D)最大,即R12(τ)也达到最大。因此,求得R12(τ)峰值对应的τ,就是两个接收信号之间的时延。
在以上推导过程中,假设信源发射信号与噪声信号之间、噪声信号与噪声信号之间都是不相关的,式(4)中的信号也被默认是无限长的序列。但是,在实际时延估计过程中,由于采集到的接收信号序列长度不可能无限长,时延估计时只能用有限长序列的信号代替推导中的无限长序列信号。此外,受到实际操作中信号噪声的相关性和其他不良因素的影响,式(4)中的计算结果并不准确,相关函数的最大值可能会被弱化,甚至会出现多个峰值,由此带来的误差会影响时延估计的稳定性。
2 广义互相关时延估计算法
为了克服基本互相关的时延估计中的缺陷,提出了广义互相关(Generalized Cross Correlation,GCC)时延估计算法。它利用加权函数增强信号中信噪比的作用,从而提高了时延估计精度[4]。利用两个接收信号x1(t)和x2(t)进行基于加权函数的广义互相关来估计时间延迟,是此算法的基本思想。在此基础之上,通过频域加权函数对信号进行前置滤波,尽量抑制噪声的干扰,然后对加权后的函数进行互相关运算可获得其峰值,工作原理如图1所示。

图1 广义互相关时延估计工作原理
根据维纳—辛钦定理可知,互相关函数与其互功率谱密度互为傅里叶变换对,则x1(t)和x2(t)的互相关函数又可以表示为:

其中,G12(ω)是x1(t)和x2(t)的互功率谱函数。当x1(t)和x2(t)经过滤波后,输出信号的互功率谱函数可以写为:

其中,H1和H2表示滤波函数,(ω)表示H2(ω)取共轭。所以,信号x1(t)和x2(t)的广义互相关函数可表示为:

其中,ψ12(ω)=H1(ω)H2*(ω),表示广义频域加权分量。在时延估计过程中,可以通过选取不同加权函数来针对不同类型的干扰噪声进行适当的滤波处理,从而有效抑制噪声干扰的影响[5],然后会使得R12(τ)有一个峰值相对较大、较尖锐,其对应的横坐标即为所求时延,从而提高时延估计精度。
广义互相关时延估计算法流程,如图2所示,图中( )*表示取共轭运算。

图2 广义互相关时延估计算法流程
在广义互相关时延估计算法流程中,先对两个通道的接收信号分别进行快速傅里叶变换FFT(Fast Fourier Transform),然后计算它们的互功率谱,在频域对接收信号的互功率谱G12(ω)进行加权函数计算,将结果进行快速傅里叶逆变换IFFT(Inverse Fast Fourier Transform),最后得到的互相关函数的峰值就对应了两个通道的接收信号的时延差τ。为了比较不同加权函数对接收信号进行滤波的效果,本文采用了加权函数,如表1所示。

表1 加权函数表达式及其特性
3 仿真与分析
为了分析研究不同加权函数在不同信噪比环境下广义互相关时延估计算法对时延估计性能的影响,下面通过MATLAB构造加有平稳高斯白噪声的两个通道接收信号进行仿真实验。仿真中采用的信号是幅度为5、频率为10 kHz、长度为1 024的正弦波信号,采用500 kHz的采样频率对两个通道接收到的信号进行采样。假设两个信号之间延迟为10个采样间隔,即延迟时间τ=0.02 ms的正弦波来仿真模拟两个不同通道的接收信号,其中噪声是平稳高斯白噪声。假设信号与噪声、噪声与噪声都是相互独立的,在信噪比为10 dB的环境下,两个仿真接收信号的波形如图3所示,基本互相关时延估计算法的仿真结果如图4所示。采用PHAT加权函数算法、Roth加权函数算法、SCOT加权函数算法和HB加权函数算法的广义互相关时延估计算法,仿真结果分别如图5(a)、图5(b)、图5(c)和图5(d)所示。
通过对比图4和图5可以看出,利用广义互相关得到的时延估计消弱了接收信号中周期性干扰信号的影响,且其互相关函数峰值也更尖锐。其中,Roth加权函数算法表现出的抗干扰噪声能力较弱,且时延估计仿真中出现了次峰波动较大的现象,进而其互相关函数的主峰值则几乎淹没在噪声干扰中。HB加权函数算法相比PHAT加权函数算法、SCOT加权函数算法和Roth加权函数算法的互相关函数的峰值,更加尖锐。HB加权函数算法的相关函数主峰值受次峰值影响较小,抗噪声干扰能力得到了提高,所以能够表现出较好的稳定性,但也存在次峰波动现象。
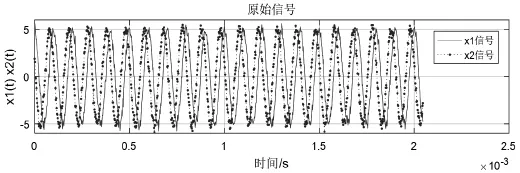
图3 两个仿真接收信号波形
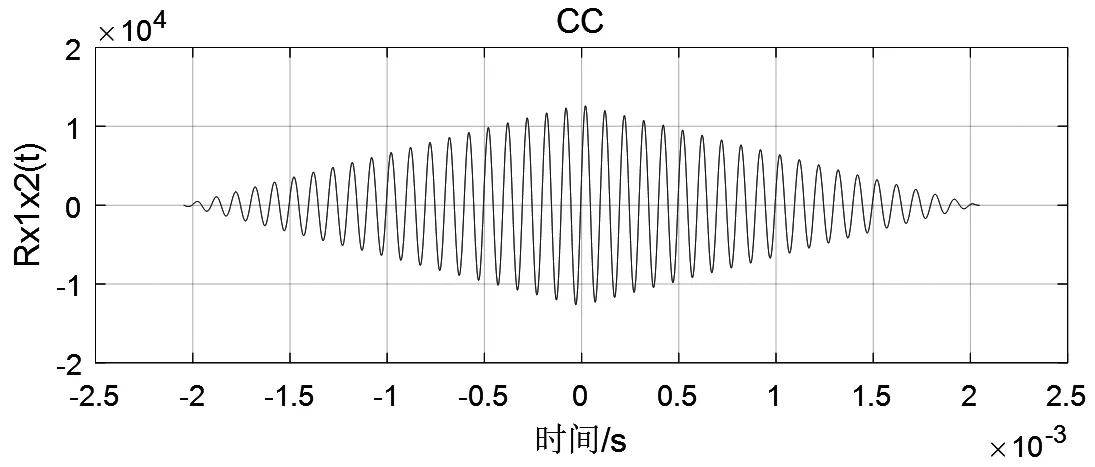
图4 基本互相关算法仿真结果


图5 信噪比10 dB时不同加权算法比较
在信噪比为20 dB的环境噪声下,不同加权函数算法时延估计算法仿真结果如图6所示。
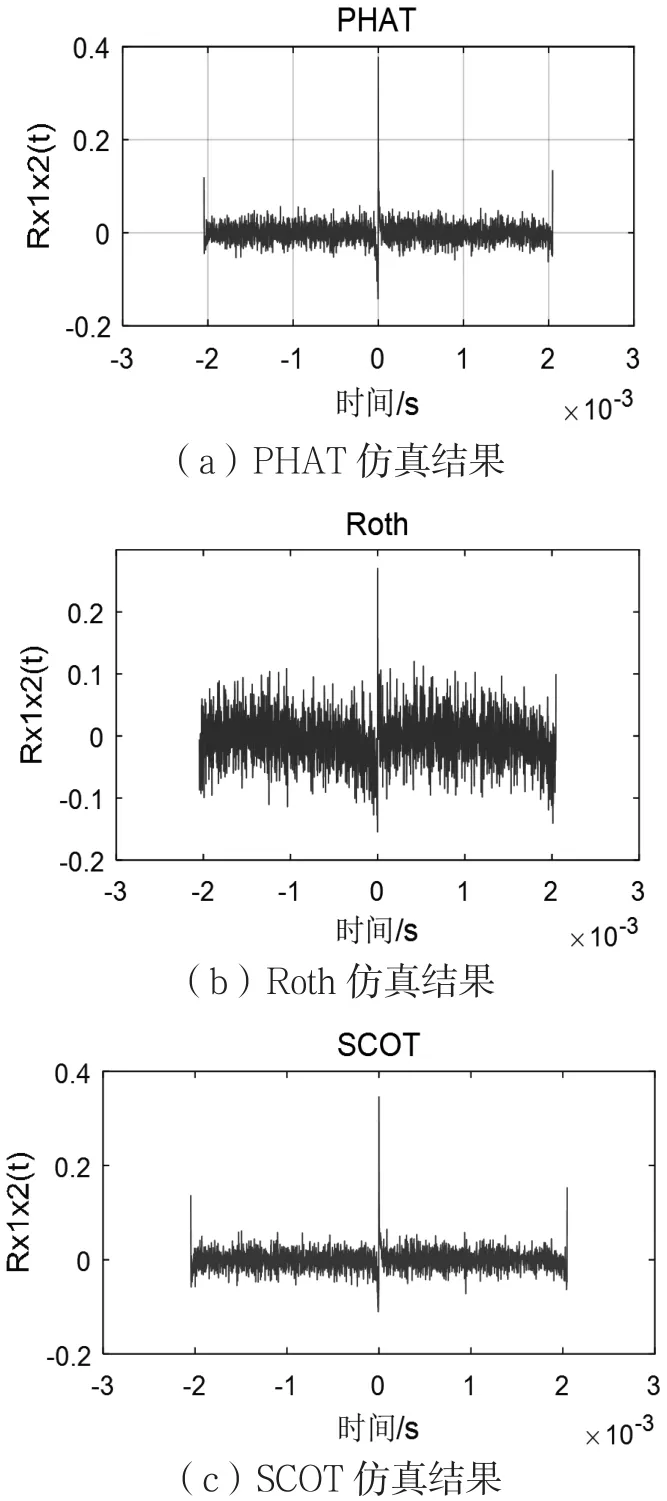
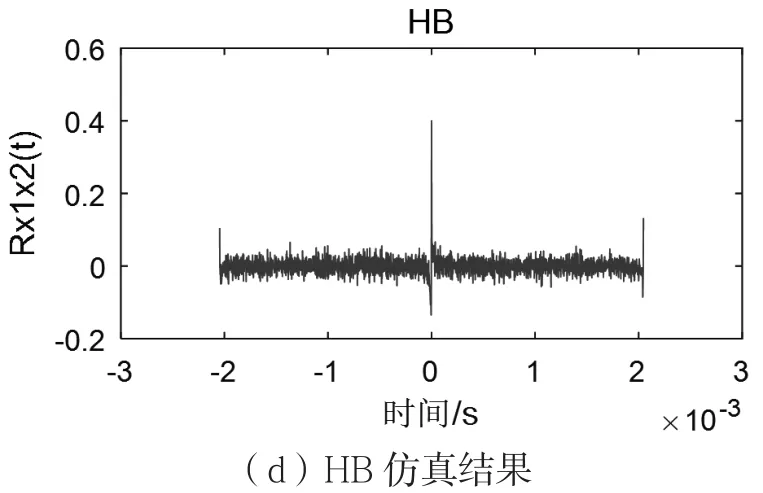
图6 信噪比20 dB时不同加权算法比较
通过比较图5和图6可知,随着信噪比的增高,几种加权函数算法时延估计的仿真效果对比较为鲜明。信噪比较高时,4种加权函数算法时延估计的互相关函数峰值均被明显凸现出来,而Roth的峰值受噪声影响较大,即抗噪声性能也比另外3种略弱。随着信噪比的降低可以看出,经Roth加权函数算法处理后的峰值几乎被淹没在噪声中,另外3种加权函数算法对接收信号的互相关处理后,峰值也会有所减弱,但还具有一定的抑制噪声能力。
在信号长度为1 024、采样频率为500 kHz的MATLAB仿真中发现,时延估计的精确性达不到期望的理想状态。为了分析接收信号的长度对广义互相关时延估计在不同加权函数算法的性能影响,本文在信噪比为40 dB的环境噪声下,采用两个不同通道的接收信号幅度为5、频率为10 kHz、信号长度为1 024 000的正弦信号,采用的采样频率同样是500 kHz,两个信号之间的延迟为10个采样间隔时的时延估计仿真,仿真结果如图7所示。


图7 信号长度1 024 000时不同加权算法比较
在不同长度的接收信号仿真中,信号长度越长,不同加权函数算法的广义互相关时延估计总体效果越稳定,其中PHAT加权函数算法、SCOT加权函数算法和HB加权函数算法的时延估计最接近,都比Roth加权函数算法有更高的抗噪声性能。仿真也发现,随着信号长度的减小,广义互相关时延估计精度性能达不到估计效果,从而导致时延估计失效。
信号长度为1 024 000、估计延时为0.02 ms时,不同加权函数算法仿真运行结果如表2所示。
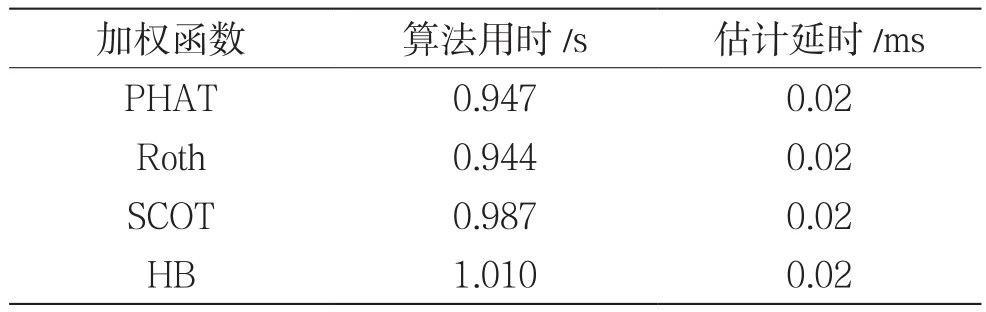
表2 不同加权函数算法仿真运行结果
从表2的运行结果可以看出,不同加权函数算法估计时延的时间是不同的。通过仿真得知,信号长度越长,算法运行时间越久,相同信号长度的时延估计中,Roth加权函数算法运行时间最短,HB加权函数算法运行时间最长。
综合以上分析结果可以得出,HB加权函数算法的互相关函数值的峰值更为尖锐,相对次峰更少,所以受次峰值影响较小。信噪比越大,接收信号的长度越长,算法用时越多,同时时延估计的准确性越高。相同接收信号长度,不同加权函数算法的时延估计时间也略有差别。使用HB加权函数算法得到的时延估计性,在以上4种加权函数算法中,抗噪性能和时延估计精度表现最好,即表现出较好的稳定性。
4 结 语
广义互相关时延估计算法是信号处理中时延估计领域的经典算法,具有较高的估计精度。但是,在低信噪比情况下,次峰值波动明显且使得相关函数的峰值受到压制,估计性能会恶化。本文经MATLAB仿真研究得出:信噪比越大,接收信号长度越长,时延估计效果越理想;Roth加权函数算法具有一定的抗噪声能力,但其性能相比于SCOT加权函数算法、HB加权函数算法及PHAT加权函数算法,表现略有不足,HB加权函数算法表现出较好的稳定性。本文只是进行了广义互相关时延估计算法的理论研究,实际中应该根据具体实际环境选取不同的算法。时延估计技术在雷达、卫星、声呐等领域均有重要的应用,所以如何在低信噪比环境下改进广义互相关时延估计算法,是今后需要研究的重点和方向。
参考文献:
[1] Knapp C H,Carter G C.The Generalized Correlation Method for Estimation of Time Delay[J].IEE Trans on ASSP,1976,24(04):320-327.
[2] 孙洋,徐慨,杨海亮.基于广义互相关时延估计算法的性能分析[J].计算机与数字工程,2013,41(01):33-34,144.SUN Yang,XU Kai,YANG Hai-liang.Analysis of Performance Based on Generalized Cross-correlation Delay Estimation[J].Computer Engineering and Digital Engineering,2013,41(01):33-34,144.
[3] 茅惠达,张玲华.声源定位中广义互相关时延估计算法的研究[J].计算机工程与应用,2016,52(22):138-142.MAO Hui-da,ZHANG Ling-hua.Generalized Crosscorrelation Time Delay Estimation Algorithm for Sound Source Localization[J].Computer Engineering and Applic ations,2016,52(22):138-142.
[4] 景思源,冯西安,张亚辉.广义互相关时延估计声定位算法研究[J].声学技术,2014,33(05):464-468.JING Si-yuan,FENG Xi-an,ZHANG Ya-hui.Study of Generalized Correlation Delay Estimation Acoustic Localization Algorithm[J].Acoustics Technology,2014,33(05):464-468.
[5] 胡小锋,刘卫东,王雷等.广义互相关电晕放电辐射信号时延估计方法[J].强激光与粒子束,2018(01):56-60.HU Xiao-feng,LIU Wei-dong,WANG Lei,et al.A Method for Time Delay Estimation of Corona Discharge Radiation Signal based on Generalized Cross-correlation[J].High Power Laser and Particle Beams,2018(01):56-60.
[6] 金中薇,姜明顺,隋青美等.基于广义互相关时延估计算法的声发射定位技术[J].传感技术学报 ,2013,26(11):1513-1518.JIN Zhong-wei,JIANG Ming-shun,SUI Qingmei,et al.Acoustic Emission Location based on Generalized Cross-correlation Time Delay Estimation Algorithm[J].Chinese Journal of Sensors and Actuari es,2013,26(11):1513-1518.
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
通信电源技术(2020年8期)2020-07-21
北京航空航天大学学报(2019年9期)2019-10-26
中国中医急症(2019年10期)2019-05-21
电子制作(2019年23期)2019-02-23
汉字汉语研究(2018年1期)2018-05-26
雷达学报(2017年3期)2018-01-19
中国工程咨询(2017年10期)2017-01-31
现代防御技术(2016年1期)2016-06-01
雷达与对抗(2015年3期)2015-12-09
