
基于偏振光传感器的全姿态角解算方法研究*
2018-06-15 07:56,,,,
单片机与嵌入式系统应用 2018年6期
,,,,
(大连理工大学 辽宁省纳米技术及系统重点实验室,大连116024)
引 言
导航是指确定当前的位置和姿态,控制到达指定目的地,这一技术广泛存在于自然界各种生物的日常活动中,协助生物完成觅食和迁徙等生理活动。而且随着人类社会的不断发展和科技的进步,越来越多的导航技术被发现及应用在各行各业,与人类的生活密不可分。现在导航技术的发展水平也代表着一个国家的现代化程度,是建设信息化强国的重要基础,无论是军事领域还是民用领域,都有着重要的研究价值和意义。
目前,使用广泛的导航技术主要包括惯性导航[1]、地磁导航[2]、卫星导航和天文导航技术等。然而各种导航技术都有各自的优点及缺点,例如惯性导航技术是一种完全独立自主的技术,不受外界干扰,短时间内具有较高的导航精度,但其由于误差累计导致长时间导航精度低,不能长期为载体提供导航信息,因此单独使用惯性导航也受到了很大的限制。除了需要对传统导航设备进行改进,研究新型导航技术及研究不同导航技术的组合使用有着重要的实际意义。
偏振光导航技术是利用天空中稳定分布的偏振模式确定载体体轴与太阳子午线之间的夹角,用于导航定向的应用。太阳光在穿过大气层时,受到大气层中空气分子等散射作用而产出偏振光,形成了稳定对称分布的偏振模式,大自然中的沙蚁、蜻蜓、金龟子等昆虫都是利用偏振模式进行导航[3-4]。偏振分布模式是自然界中的固有资源之一,不易受到人为干扰,因此在军事领域具有广阔的应用前景。
作为一种完全独立自主的新型导航技术,偏振光导航还具有无误差累计、精度高、结构简单等优点。因此在成功研制出偏振光传感器的基础上,如何利用偏振光进行导航定姿或定位也备受关注。
现阶段偏振光传感器主要应用在以下两个方面:一方面是用于确定载体当前的位置,但定位精度较低不适合实际应用[5];另一个方面就是利用偏振光传感器仅计算航向角,但现阶段主要针对二维水平方面的研究[6],与无人机实际飞行存在一定的差距。基于目前的研究现状,本文提出了一种利用偏振光传感器实现全姿态角的方法。
1 全姿态角解算方法
1.1 航向角的获取
本文选择的导航坐标系为北东地坐标系,定义偏振光传感器的测量坐标系(m系)如图1所示。

图1 偏振光传感器测量模型
其中O-XnYnZn即为导航坐标系,X轴、Y轴和Z轴分别指向北向、东向和地心方向。定义O点为偏振光传感器安装所在位置;Xm轴是偏振光传感器的参考方向,是偏振光传感器内偏振片安装的基准方向;Zm轴为偏振光传感器的观测方向。坐标系O-XnYnZn构成右手坐标系,为避免图形过于复杂,图中没有标记Ym轴。φ表示E矢量方向与偏振光传感器参考方向之间的夹角,即偏振光传感器的测量值。S点是太阳的投影点。hs和αs分别为太阳的高度角和方位角,它们的大小与观测位置和观测时间有关,可以根据下式计算得到:
(1)
其中,δ为太阳赤纬,β为观测点的纬度,t为太阳时角,与观测点的经度有关。
根据图1所示,入射光E矢量方向在m系可以表示为:
(2)
偏振光传感器的观测方向单位化在m系中表示为:
(3)
由于入射光的E矢量始终与观测方向和太阳入射方向构成的平面垂直,即:
(4)
(5)

(6)

(7)
① 当γ=θ=0°时,在这种运动状态下,通过式(6)计算得到:
(8)
通过上式进一步计算可得:
(9)
② 当γ≠0°或θ≠0°时,在横滚角或者俯仰角不为零的运动状态下,利用式(6)计算得到:
令A=cotφcosθ-sinγsinθ,B=cosγ,C=(cotφsinθ+sinγcosθ)tanhs,计算得到:
(10)
无人机在飞行过程中,大多数的运动状态工作在横滚角与俯仰角不为零的情况下,根据上式可知,此时航向角的解算不能仅由偏振角和太阳方位角计算得到,还与横滚角和俯仰角的大小有关。
1.2 俯仰角与横滚角的获取
太阳投影点在导航坐标系和机体坐标系的关系如图2所示。其中O-XnYnZn表示导航坐标系,O-XbYbZb表示集体机体坐标系,外面的半球表示以导航坐标系观测得到的天球模型,Sn为太阳在该天球模型上的投影点,可以表示为:



图2 太阳在不同坐标系中投影示意图
当机体坐标系与导航坐标系重合时,太阳在两个坐标系的投影点相同。当两个坐标系不重合时,即此时的姿态角不为零时,太阳在导航坐标系和机体坐标系的投影点不同,可以分别计算太阳在不同坐标系中的投影点,根据投影点计算坐标系之间的姿态关系,进而可以计算俯仰角与横滚角。
太阳在两个坐标系中投影存在如下关系:
(11)
将上式展开可得:
根据式(11)可知,若已知Sb与Sn的大小,利用上一小节可计算出当前的航向角,通过解算上式可求得当前的俯仰角与横滚角,即实现全姿态角的解算。
根据式(1),若已知当前观测位置的经纬度和时间,通过这两个公式可计算出太阳矢量在导航坐标系中的投影Sn。
根据瑞利散射模型可知,天空中任意一点的E矢量方向总是垂直于观测方向和太阳矢量方向组成的平面,因此太阳方向矢量也垂直于任意两点E矢量方向(不平行)组成的平面,则可以通过解算E矢量方向求解太阳方向矢量在机体坐标系中的投影Sb,解算方法示意图如图3所示。其中O点是观测点,O-XmYmZm坐标系是偏振光传感器的测量坐标系,S为太阳投影点,Sm是太阳方向矢量在偏振光传感器测量坐标系中的投影,P1和P2分别是两个偏振光传感器的观测方向上的E矢量方向。

图3 太阳方向矢量求解示意图

利用两个点源式偏振光传感器搭建偏振光传感器测量单元模型,利用两个偏振光传感器分别测量不同方向上的E矢量方向,进而计算太阳方向矢量在m系中的投影,测量单元模型示意图如图4所示。其中,平面为A水平面,平面上的坐标系O-XYZ是测量坐标系m系。平面B和平面C是偏振光传感器的安装面,它们与平面A成45°角设计,这一设计为了方便进行E矢量在不同坐标系之间的相互转换,坐标系O1-X1Y1Z1和坐标系O2-X2Y2Z2分别在平面B和平面C上。X1轴和X2轴与Y轴平行,Y1轴和Y2轴与X轴平行。
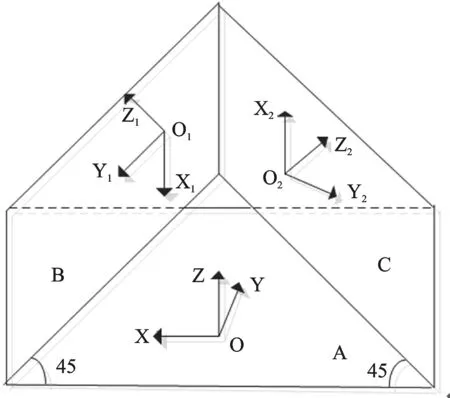
图4 双偏振光传感器测量单元模型
平面B上的偏振光传感器测量到的E矢量方向在坐标系O1-X1Y1Z1中的投影P1和平面C上的偏振光传感器测量到的E矢量方向在坐标系O2-X2Y2Z2中的投影P2如下:
(12)
其中k1和k2的取值可以为1或者-1,这是由于偏振光传感器存在测角模糊性造成的。
由于平面B和平面C与平面A的角度关系固定,因此三个坐标系之间的姿态转移矩阵也固定不变,分别将投影P1和投影P2通过姿态转移矩阵求出两个E矢量方向在坐标系O-XYZ的投影:
(13)
由此可以求出太阳方向矢量在m系中的投影Sm:
Sm=kP1(φ1)P2(φ2)
(14)
其中k=k1k2,可通过太阳的位置判断其大小。
所以太阳方向矢量在b系中的投影Sb为:
(15)
联立式(10)和式(11)即可对航向角、俯仰角及横滚角进行解算,实现全姿态角的求解。
2 全姿态角解算方法
为了验证所提方法的有效性,本文利用Matlab对该方法进行了仿真实验,通过轨迹发生器进行轨迹的生成并生成理论姿态角,又因为点源式偏振光传感器的测量精度可达到0.2°,在生成的点源式偏振光传感器数据中加入0.2°的误差项作为真实输出。然后通过上面描述的方法进行姿态角的解算,通过比较解算出的测量值与理论值判断该方法的可行性。
本文为模拟三维运动下仅利用偏振光传感器进行全姿态角解算的有效性,进行了下面的简单三维仿真实验。其中航向角固定偏转30°,横滚角保持水平不变,俯仰角进行一定的姿态变化,从10°变化到0°,简单模拟小型无人机的起飞过程。实验结果如图5和图6所示。
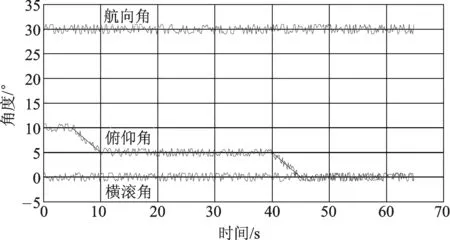
图5 姿态角对比图
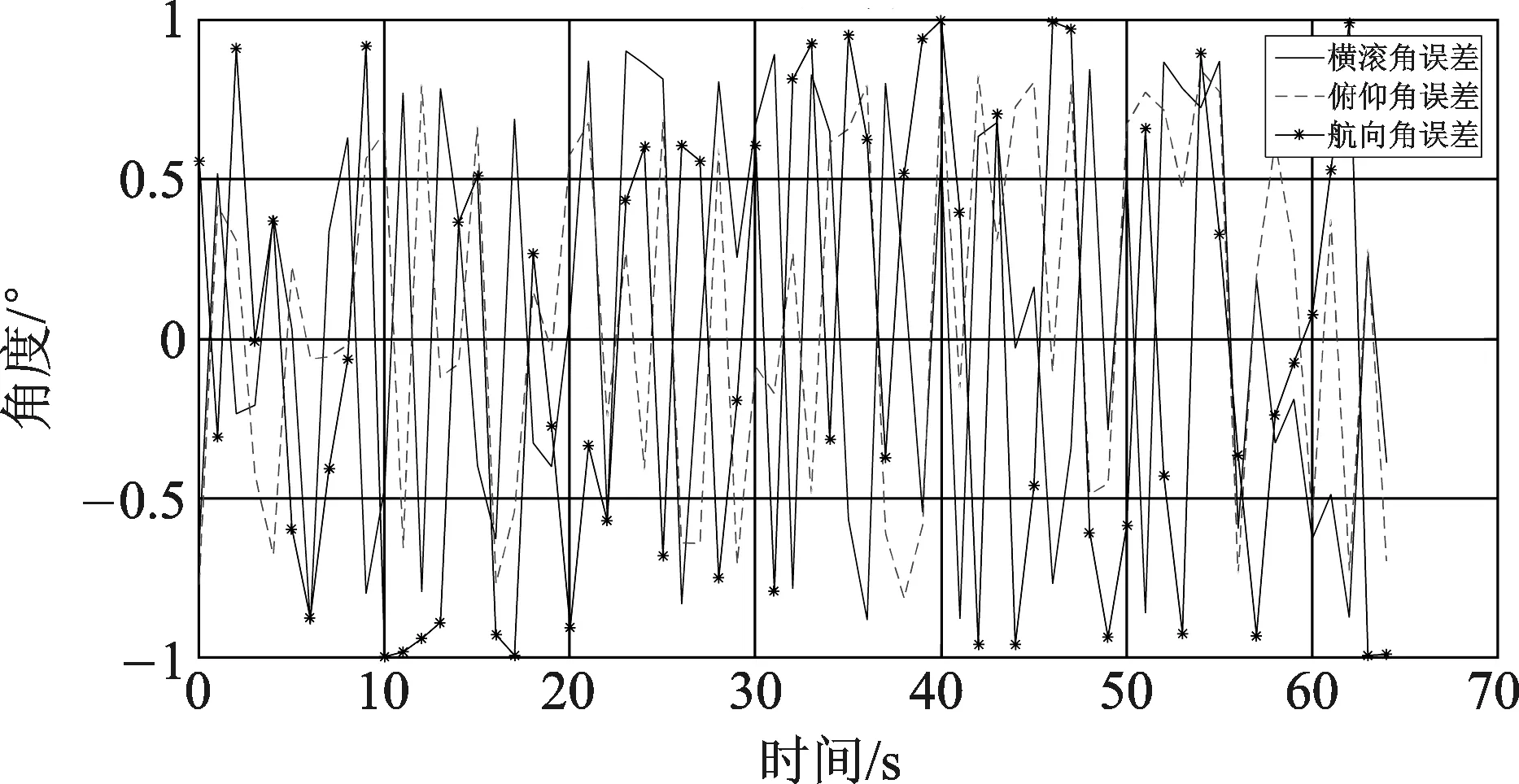
图6 姿态角误差
从图中可以看出,通过该方法能够较准确地测量出姿态角,姿态角误差在1°以内,能够满足小型无人机的飞行需求。该方法主要在解算过程中涉及大量的三角函数的反解,造成解算过程中误差的增大,但可通过提高偏振光传感器的制造精度以提高姿态角的解算精度。
结 语

[1] 朱家海. 惯性导航[M]. 北京:国防工业出版社, 2008.
[2] 寇义民. 地磁导航关键技术研究[D]. 哈尔滨:哈尔滨工业大学, 2010.
[3] Müller M, Wehner R. Path integration in desert ants, Cataglyphis fortis[J]. Proceedings of the National Academy of Sciences of the United States of America, 1988, 85(14):5287.
[4] Wehner R, Gallizzi K, Frei C, et al. Calibration processes in desert ant navigation: vector courses and systematic search[J]. Journal of Comparative Physiology A, 2002, 188(9):683-693.
[5] 褚金奎, 王洪青, 戎成功,等. 基于偏振光传感器的导航系统实验测试[J]. 宇航学报, 2011, 32(3):489-494.
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
空间电子技术(2020年5期)2020-03-11
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
现代职业教育·中职中专(2018年11期)2018-06-11
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
中国中医药现代远程教育(2014年14期)2014-03-01
