
某型全回转港作拖船主动力遥控系统设计
2018-06-21 03:14
机电设备 2018年3期
(大连辽南船厂,辽宁大连 116041)
0 引言
主动力装置是船舶最主要的装置。随着社会的发展、经济水平的提高、科学技术的不断进步,船舶机舱自动化程度也变得越来越高,船舶主动力遥控系统已经成为一个必不可少的部分。主动力遥控系统是指从船舶的驾驶室或集控室对主动力进行远距离操作,以控制船舶航速和航向的一种控制方式。
工厂建造的某型船(以下简称本船)虽不入级,但为取证,拟按★CSM入级符号进行设计。★CSM符号表示船舶的推进机械和重要辅助机械由CCS进行产品检验,而且船舶轮机和电气设备由CCS审图并在建造中检验,需符合CCS规范的规定[1]。
本船自动控制附加标志为 BRC,即主推进装置由驾驶室遥控,机器处所连续有人值班[1]。
1 主动力系统组成
本船是一艘具有良好拖带能力与操作性能的全回转拖船,其主动力系统由双主机双舵桨装置组成,如图1所示。主机为柴油机;舵桨为Z型全回转舵桨,由一台柴油机通过万向节和中间轴驱动。
2 遥控系统控制方式
主机遥控系统根据采用设备及实现手段的不同,可分为气动式、电动式、电气式、电液式和微机控制式等几种控制方式[2]。
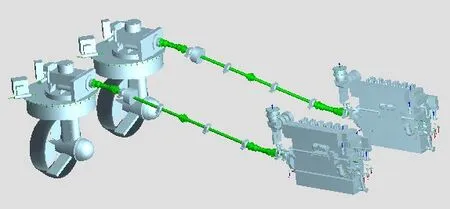
图1 主动力系统组成图
1)气动式主机遥控系统主要由气动遥控装置和气动驱动机构组成,并配有少量电动元件(如电磁阀和测速电路等)。其主要优点是驱动功率大、工作可靠、结构简单、便于掌握和管理。但是这种控制方式存在压力传递滞后的现象,因此控制距离受到限制,而且对气源要求高,气动元部件容易出现漏气、脏堵及磨损现象。
2)电动式主机遥控系统的遥控装置和驱动机构均由电动元部件构成。其主要优点是结构紧凑、遥控距离不受限制、控制性能好,能较灵活地实现各种功能。但其执行机构的驱动功率小,对管理人员技术要求高。
3)电气式主机遥控系统的遥控装置主要由电动元器件构成,而驱动机构由气动元件构成。这种结构充分发挥了电动式和气动式两种遥控系统的优点,是较完善的遥控系统。
4)电液式主机遥控系统主要由电动遥控装置与液压执行机构组成。其优点是驱动功率大、可控性好、便于远距离控制等。但其结构复杂,需设置液压油回收系统,并且容易出现漏油和漏气的现象。
本船采用电气式主机遥控系统和电液式舵桨遥控系统。
3 主动力遥控系统构成及优点
本船主动力遥控系统主要包括主机和舵桨的遥控系统及监测系统。
3.1 主机遥控系统
主机遥控系统设备组成满足规范要求[3],系统框图如图2所示。
通常情况下,主机遥控系统需配置在驾驶室或集控室(若设有时)。由于本船船长仅为28 m,故没有设置集控室。在驾驶室通过主机遥控装置对主机进行调速和紧急停车等控制。

图2 主机遥控系统图
主机遥控系统设有必要的测量仪表和检测报警信号装置。报警系统可在有关控制室对被监控的机电设备和监控系统本身的故障发出报警信号;能对同时发生的所有故障发出报警信号;所有报警能同时发出视觉和声响信号;报警系统供电连续,如正常电源发生故障,能自动转换至备用电源,并发出报警,满足规范要求[3]。
3.2 舵桨遥控系统
舵桨遥控系统设备组成如图3所示。

图3 舵桨遥控系统图
通常情况下,操舵装置由主操舵装置和辅助操舵装置组成。主操舵装置设有 2台相同的动力设备,若能在船舶最大航海吃水和以最大营运航速前进时将舵自一舷35°转至另一舷35°,并可在相同条件下,在不超过28 s内将舵自一舷35°转至另一舷30°,则可不设置辅助操舵设备。
本船仅在驾驶室设置 2个主操控装置,其配备Aquapilot控制系统。舵桨通过驾驶室Aquapilot控制系统来遥控旋转方位,以实现 360°全回转。每一台舵桨的Aquapilot系统都是一个带时间积分反馈、对立、随动的控制系统,这意味着每个舵桨都有一个独立的控制系统,一个舵桨系统发生故障不会影响另一个控制系统。
舵桨遥控系统控制功能比较全面,其主要部件及功能如下所示。
控制手柄的主要功能为:1)控制回转角度和发动机转速;2)控制0~30°滑差;3)控制离合器合排。
推力方向指示器的主要功能为:1)快速、准确读取并指示推进方向;2)指示螺旋桨转速、推力。
舵桨滑差离合器控制面板的功能是:1)保护离合器合排;2)保护和指示离合器合排;3)指示离合器合排、脱排、滑差状态和功能故障。
备用控制面板的功能是给系统提供应急的非随动控制,其上有左、右转的按钮用来控制回转角度,另一个旋钮控制主机转速。
3.3 主动力监测系统
主动力监测系统主要包括主机和舵桨监测系统。本船机器处所有人值班,故配置1个机舱监测报警板。主机、舵桨和全船其他监测报警点均显示在此监测报警板上。
3.3.1 主机监测
在机舱报警板上可显示相应主机系统报警点,在驾控台主机显示板上设有延伸报警板。根据规范及厂家标准,主机监测系统报警点为:1)滑油低压、高温、过滤器处压力低;2)燃油泄漏;3)淡水压力低、温度高;4)海水压力低;5)主机自动停车项目,即当滑油压力低至0.15 MPa,或主机超速118%~120%时,主机自动停车。
3.3.2 舵桨监测
在机舱报警板上安装有操舵系统主报警显示器,在驾控台舵桨主控制台上设有延伸舵桨报警单元。根据规范及厂家标准,操舵监测系统报警点如下。
控制系统报警点:1)控制箱故障;2)系统电源故障。
润滑系统报警点:1)润滑油液位低、温度高;2)离合器控制油压力低。
回转液压系统报警点:1)工作油压力低;2)液压油油位低、温度高;3)过滤器堵塞。
重力油柜报警点:1)重力油柜油位低;2)气源压力低或高。
3.3.3 其他监测
机舱监测报警板接收全船必须的设备综合报警信号和相关液位报警信号,比如有关发电机、锅炉、空压机、污水处理单元、海底阀箱防腐、CO2泄漏、机舱报警灯柱等的综合报警,以及有关燃油舱、淡水舱和污油水舱等的液位报警。
4 设计总结
通过系泊试验和航行试验,对以下几个方面进行验证。1)在驾驶室驾控台使用遥控装置对主机的调速和紧急停车做3次效用试验,遥控操纵动作准确可靠;2)在驾驶室驾控台检查主机紧急停车的显示装置功能,主机紧急停车显示装置的显示正确;3)对主机滑油、冷却水的声光报警装置和超速保护器进行模拟试验,遥控站报警动作准确可靠;4)对主机自动停车做3次效用模拟试验,自动停车动作准确可靠;5)进行主机驾驶室驾控台遥控与机旁就地控制的控制权转换试验,检查两者之间的联锁功能,优先次序满足规范要求,即机旁优先,防止了机械损伤;6)进行主机控制站指示装置指示功能试验,同一时刻只在一个控制站控制。满足规范要求;7)进行主机控制系统发生故障,遥控站报警及就地控制试验,遥控站报警动作准确可靠,可以在就地进行控制;8)检查舵桨装置的报警系统功能,对各报警点进行模拟效用试验,报警动作准确可靠;9)在驾驶室驾控台通过遥控装置,检查舵桨在主机各种转速情况下的转舵功能:(1)对单个舵桨装置进行操纵效用试验,左右舵桨分别进行顺时针、逆时针操纵效用试验,各进行三个循环,遥控操纵动作准确可靠;(2)对双舵桨装置进行操纵效用试验,对左、右舵桨同时做顺时针、逆时针的操纵效用试验,各进行三个循环,遥控操纵动作准确可靠;(3)在0°、±90°和180°时,检查舵角指示器与操纵手柄角度的误差,误差满足厂家标准范围。
此外,船舶主动力遥控系统功能还可进一步完善。可根据不同船东的要求,增加必要的智能遥控设备,船舶的主动力遥控系统不仅能够实现船上遥控,还能实现岸基遥控,最终达到船舶无人驾驶的状态。无人驾驶船舶应该是未来船舶的发展目标和方向,因为人类终归要将自己从航海中无处不在的危险和繁重的劳动中解脱出来[4]。
5 结论
1)主动力遥控系统不仅能够改善船员的工作环境、减轻船员的劳动强度、提高效率,而且能够提高船舶在运行时的安全性、可靠性和经济性。因此,船舶主动力遥控系统的设计与实现是十分有必要的。
2)主动力遥控装置可实现集成化自动化操作,其操纵简单,设有必要的联锁,可防止机械损伤,能收集主动力各监测点报警信号。这种装置正逐步受到人们的重视,极具推广价值。
[1] 中国船级社. 钢质海船入级与建造规范[S]. 2012.
[2] 中国船舶工业总公司. 船舶设计实用手册 电气分册[M]. 北京: 国防工业出版社, 1997.
[3] 中华人民共和国海事局. 船舶与海上设施法定检验规则—国内航行海船法定检验技术规则[S].2011.
[4] 中国船级社. 智能船舶规范[S]. 2015.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年5期)2022-04-02
小学生优秀作文(低年级)(2021年11期)2021-12-06
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年1期)2020-12-25
语文世界(小学版)(2019年2期)2019-02-24
铁道通信信号(2018年5期)2018-06-28
汽车维护与修理(2016年10期)2016-07-10
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28
