
基于路面附着系数的汽车纵向防碰撞策略研究
2018-07-03 04:32李绪龙钱立军合肥工业大学汽车与交通工程学院合肥230009
车辆与动力技术 2018年2期
李绪龙, 郏 瑞, 钱立军(合肥工业大学 汽车与交通工程学院,合肥 230009)
自动驾驶是当前和未来汽车领域研究的焦点,其中,汽车防碰撞系统是其重要一方面.目前汽车防碰撞系统一般是由摄像头、雷达等传感器来获取自车以及其他车辆的行驶信息,防碰撞控制策略再根据行驶环境来决定是否预警或者主动介入制动.汽车纵向防碰撞策略大都是依据安全车距模型[1-2],如NHSTA 模型、Mazda 模型、Honda模型、伯克利模型、Jaguar 模型等.
国内外有相关学者在使用传感器技术、模型预测以及数据融合等方式来估算路面附着系数.清华大学卢俊辉等[3]提出了一种“基于路面温度和太阳辐射强度”的分辨路面湿滑情况,该方法结果说明识别路面的准确率高达90%,Laura. Ray等[4]使用扩展卡尔曼滤波器和贝叶斯原理来估算不同路面附着系数的方法;山东大学杨福广等[5]在考虑汽车制动工况下,采用扩张观测器原理来估算纵向路面附着系数.
目前有一些安全距离模型适用于特定的路面,不能因路面情况的变化而调整.因此,准确估算路面附着系数至关重要.利用扩展卡尔曼滤波等方法估算存在精度不足或者计算量过大,不能很好地反映出真实路面情况.
文中讨论了路面附着系数对安全车距模型的影响,采用双重无迹卡尔曼滤波(Unscented Kalman Filter, UKF)对车辆状态估算和路面附着系数估算.提出一种基于路面系数估算的汽车纵向防碰撞控制策略,并选取相关工况进行CarSim和MATLAB/Simulink联合仿真实验,验证该策略估算的路面附着系数准确性和汽车纵向防碰撞预警有效性.
1 安全车距模型
1.1 汽车制动过程分析
如图1所示的汽车制动过程,t1为反应时间,t2为制动协调时间,t3为减速度到最大值的时间,t4是汽车以最大减速度到停止的时间,amax为制动最大减速度.

图1 汽车制动过程
其具体分析内容取自汽车理论[6]可知,若以初始速度v0开始制动到停下来的制动距离为Sh,则
.
(1)
1.2 安全车距模型建立
经分析可得自车与前车保持的安全车距S计算如下.
S=Sh-St+S0,
(2)
式中:St为前车行驶的距离;S0为距离裕值.
考虑到制动时承受的惯性力,若采取全力制动会影响驾驶员的舒适性.因此,引入驾驶员舒适性系数(ξ)来划分安全车距等级.根据文献[7]可知,一般情况下,驾驶制动减速度为-2~-3 m/s2,这里ξ取0.3.安全车距S划分为预警安全车距Sw、临界安全车距Sd和极限安全车距Se.
分析可知,当自车速度大于前车速度才会存在碰撞风险.设定v0为自车速度,vt0为前车速度,at为前车减速度,aq为前车加速度.
前车匀速或者静止:自车只要减速到跟前车速度时,若还不碰撞,之后即可安全.
(3)
前车减速:若at<ξamax,自车只要减速到跟前车速度时,若还不碰撞,之后即可安全.
(4)
若at≥ξamax,自车只有减速到停止时,若还不碰撞,之后即可安全.
(5)
前车加速:自车只要减速到跟前车速度相等时时,若还不碰撞,之后即可安全.
(6)
1.3 路面附着系数影响分析
根据汽车理论[6]可知,汽车在制动过程中,路面所能提供的最大减速度为
amax≤μg,
(7)
综上所述分析可知,在其它同等条件下,汽车所需要的制动距离会随着不同的路面附着系数变化而增大或者减小.
2 路面附着系数估算
2.1 七自由度动力学模型
这里采用的是非线性的七自由度车辆动力学模型,如图2所示.汽车的质心为原点,纵向对称轴为x轴,向前为正,横向对称轴为y轴,向左为正,力矩以逆时针方向为正.

图2 七自由度动力学模型
纵向:

(8)
侧向:
(9)
横摆:
(10)
四个车轮的回转运动:
(11)
式中:vx、vy为纵、侧向速度;ax、ay为纵、侧向加速度;γ为横摆角速度;δ为前轮转角;m为整车质量;Iz为转动惯量;Γ为横摆力矩;la、lb为质心到前、后轴的距离;tf、tr为前、后轮距;Fxij、Fxij为轮胎的纵、侧向力;J为车轮旋转惯量;R为轮胎滚动半径;wij为轮胎角速度;Tdij、Tbij为轮胎驱动、制动力矩;下标f,r表示前后;l,r表示左右.
对上述项目之外,现阶段无法预料的其他费用,按不包括固定资产折旧和利息净支出之外的其他各项费用之和的5%计算,按除折旧和利息净支出。
2.2 轮胎模型
这里采用Dugoff轮胎模型并对其变形来计算轮胎纵向力和侧向力[8].公式如下:.
(12)
(13)

(14)
(15)
(16)
式中:Fx0、Fy0分别是纵、侧向为归一化轮胎力;Cx0、Cy0分别是轮胎纵、侧向归一化刚度;λ是轮胎滑移率;Cx、Cy分别是轮胎纵、侧向刚度;α是轮胎侧偏角;μ是路面附着系数.这些所需的输入量可通过式(8)~(10)来计算.
2.3 双重无迹卡尔曼滤波原理
UKF滤波算法是以扩展卡尔曼为基础的一种非线性滤波方法[9],用一系列确定样本逼近状态的后验概率密度.具体流程如下.
一个非线性系统:
(17)
式中:xk是状态向量;uk是输入向量;yk是输出向量;wk;vk分别是过程噪声和输出噪声.
(1)滤波初始化即k=0的初始均值和方差

(18)
式中:x0为初始时刻状态(x(0|0)).
(2)对于k=1,2…,进行迭代
依据无偏变换计算2n+1个Sigma点

(19)
式中:i=1,2…n;λ为比例参数;状态尾数为n.
(3)时间更新

(20)
(4)测量更新

(21)
式中:Wi(m)、Wi(c)是Sigma点的均值的权、方差的权,根据文献[10]计算可得. 过程噪声和输出噪声其相互独立的零均值高斯白噪声,且协方差分别为Qk和Rk.
2.4 路面附着系数估算过程
设计估算车辆状态的UKF1和路面附着系数估算的UKF2结合起来,如图3所示的路面附着系数估算框图.UKF1估算的车辆状态以及 Dugoff轮胎模型估算出Fx0和Fy0,然后,再结合七自由度动力学模型计算所需要的参数,输入到UKF2滤波算法中进行路面附着系数估算,从而这两个滤波器即可形成闭环反馈.

图3 基于双重UKF估算的路面附着系数框图

3 汽车防碰撞分级预警策略
考虑到要在恰当时机对汽车预警或者主动介入制动,这里提出一种汽车防碰撞分级预警策略.自车与前车的实时车距Sr和相对速度△v通过雷达等传感器获取.以Sr和△v作为预警判断参数,预警安全车距Sw、临界安全车距Sd和极限安全车距Se作为门限,建立分级预警策略如表1.

表1 分级预警策略
当两车实时车距Sr大于预警安全车距Sw或自车速度小于前车速度时,车辆处于安全行驶状态,不用预警;当两车实时车距Sr在预警安全车距Sw与危险安全车距Sd之间且自车速度大于前车速度时,对驾驶员进行声音预警,提示驾驶员有潜在的危险;当两车实时车距Sr在危险安全车距Sd与极限安全车距Se之间,且自车速度大于前车速度时,车辆处于危险工况,防碰撞控制主动介入,且以0.3gμ制动;当两车实时车距Sr小于极限安全车距Se且自车速度大于前车速度时,车辆处于极限危险工况,防碰撞控制主动介入且以gμ制动.
4 仿真分析
为了验证基于双重UKF的路面附着系数估算算法的准确性和这里提出的汽车防碰撞控制策略的是否有效性.在CarSim和MATLAB/Simulink环境下,搭建平台联合仿真.
仿真测试选定前车静止工况来验证.路面附着系数分类型如表2所示.自车以初始速度为5 m/s进行匀加速行驶,分别对带有路面附着系数估算和未带路面附着系数估算的汽车防碰撞策略测试仿真.后者路面附着系数设定为0.5.

表2 仿真路面设定
工况1和未带路面附着系数估算的防碰撞策略的测试仿真结果如图4~6所示.

图4 路面附着系数估算结果

图5 带有路面附着系数估算防碰撞策略仿真结果
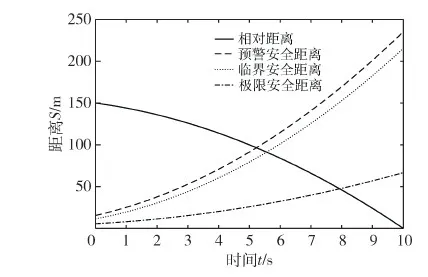
图6 未带路面附着系数估算防碰撞策略仿真结果
图4为基于双重UKF估算出的路面附着系数和设定值的对比结果.表明该算法能够准确地估算出路面真实情况.当路面条件发生时,该算法也能够快速响应其变化,估算路面附着系数.
由图5可知,带有路面附着系数估算的防碰撞策略会分别在6.2 s、6.8 s、8.6 s给出2级、1级和0级预警等级.由图6可知,未带路面附着系数估算的防碰撞策略会分别在5.2 s、5.4 s、7.8 s给出2级、1级和0级预警等级,从而得知未带路面附着系数估算的防碰撞策略无法适应路面的变化,大约会提前1 s给出了碰撞预警,即属于误报或者太早的进入制动介入.带有路面附着系数估算的防碰撞策略可以很好的自适应调节安全车距,在恰当的时刻给出相应的碰撞预警.
工况2和未带路面附着系数估算的防碰撞的测试仿真结果如图7~9所示.

图7 路面附着系数估算结果

图8 带有路面附着系数估算防碰撞策略仿真结果

图9 未带路面附着系数估算防碰撞策略仿真结果
图7为基于双重UKF估算出的路面附着系数和设定值的对比结果.表明该算法能够准确地估算出路面真实情况.当路面条件发生时,该算法也能够快速响应其变化估算出路面附着系数.
由图8可知,带有路面附着系数估算的防碰撞策略会分别在4.3 s、4.6 s和7 s给出2级、1级和0级预警等级.由图9可知,未带路面附着系数估算的防碰撞策略会分别在5.8 s、6.3 s和8.6 s给出2级、1级和0级预警等级,从而得知未带路面附着系数估算的防碰撞策略无法适应路面的变化,大约延迟了1.5 s才给出碰撞预警,即属于漏报或太迟介入制动,造成无法避免碰撞.带有路面附着系数估算的防碰撞策略可以很好的自适应调节安全车距,在恰当的时刻给出相应的碰撞预警.
5 结 论
文中分析了路面附着系数对汽车防碰撞预警准确性的影响,对现有的防碰撞安全车距模型进行了改进和优化,提出了基于路面附着系数的汽车纵向防碰撞策略.根据双重无迹卡尔曼滤波原理,能够对车辆状态和路面附着系数的准确估算,从而实现了自适应调整安全车距模型的防碰撞分级预警策略.结合CarSim和MATLAB/Simulink进行联合仿真验证.仿真结果表明该策略可以准确地估算出路面附着系数,进而能够可以调整安全车距给出相应的预警.
参考文献:
[1] Zhang Y, Antonsson E K, Grote K. A new threat assessment measure for collision avoidance systems[C]//Intelligent Transportation Systems Conference, IEEE,2006:968-975.
[2] Doi A, Butsuen T, Niibe T, et al. Development of a rear-end collision avoidance system with automatic brake control [J]. Jsae Review, 1994, 15(4):335-340.
[3] 卢俊辉, 王建强, 李克强,等. 基于路面温度和太阳辐射强度的路面状态识别方法[J]. 农业机械学报, 2010, 41(5):21-23.
[4] Ray L R. Nonlinear tire force estimation and road friction identification:Simulation an Experiments [J].Automatica,1977,33(10):1819-1833.
[5] 杨福广,李贻斌,阮久宏,等.基于扩张观测器的路面附着系数实时估计[J].农业机械学报,2010(8):6-9.
[6] 余志生. 汽车理论[M].5版.北京:机械工业出版社, 2009.
[7] Seungwuk Moon, Kyongsu Yi. Human driving data-based design of a vehicle adaptive cruise control algorithm [J]. Vehicle System Dynamics, 2008, 46(8):661-690.
[8] Dugoff H P, Fancher P S, Segel L. An Analysis of Tire Traction Properties and Their Influence on Vehicle Dynamic Performance [J]. SAE Transactions, 1970.
[9] Julier S, Uhlmann J, Durrant-Whyte H F. A new method for the nonlinear transformation of means and covariances in filters and estimators [J]. IEEE Transactions on Automatic Control, 2000, 45(3):477-482.
[10] Julier S J. The scaled unscented transformation[C]// American Control Conference, 2002. Proceedings of the. IEEE, 2002:4555-4559.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
今日农业(2019年12期)2019-08-13
童话世界(2019年14期)2019-06-25
莫愁·时代人物(2018年7期)2018-09-12
莫愁(2018年20期)2018-07-19
幼儿教育·父母孩子版(2017年12期)2018-02-28
现代园艺(2017年22期)2018-01-19
火控雷达技术(2016年3期)2016-02-06
橡胶工业(2015年4期)2015-07-29
橡胶工业(2015年4期)2015-07-29
