
一种新型多自由度混联运动平台的设计与仿真分析
2018-07-04 05:58罗磊王培俊黄琳秦
机械制造与自动化 2018年3期
罗磊,王培俊,黄琳秦
(西南交通大学 机械工程学院,四川 成都 610031)
0 引言
多自由度运动平台在模拟驾驶、工业机器人、数控机床等领域应用广泛,实用性较高[1]。串联机构工作空间大、结构简单,但累积误差大、刚度低;并联机构刚度大、精度高,但控制难度大、成本高[2]。本文结合串并联机构的优缺点与实际使用需求情况,设计了一种新型混联运动平台,具有4个自由度,以实现刚度大、响应快和应用范围广的目标。
新型混联运动平台的结构主要由两部分组成:串联部分和并联部分,设计的主视图如图1所示。串联部分由具有回转机构的转台组成,实现动平台绕Z轴的转动;并联部分由3-RPS并联机构组成,实现动平台绕X轴、绕Y轴转动和沿着Z轴的移动,并联部分的结构简图如图2所示。
根据运动平台的串联部分的特点,计算运动平台在串联部分的姿态变换矩阵;运用欧拉法计算出并联部分的姿态变换矩阵,从而计算混联运动平台末端执行器的坐标系坐标;运用空间几何法,建立末端执行器位置与电动缸总长度关系。在MATLAB中,根据机构的逆解,求解运动平台末端执行器所能够达到的最大空间位置,将其与3-RPS并联机构的工作空间进行对比;在ADAMS中,建立该机构的简易模型,然后进行各个自由度的动力学分析;采集ADAMS动力学分析的多项数据,在MATLAB中进行误差分析。
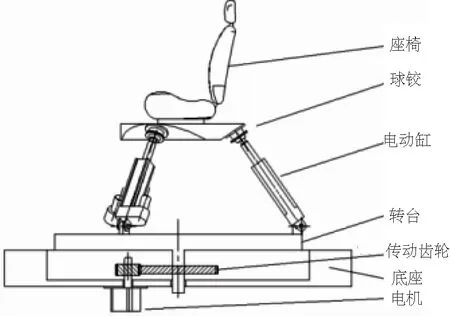
图1 混联运动平台的主视图
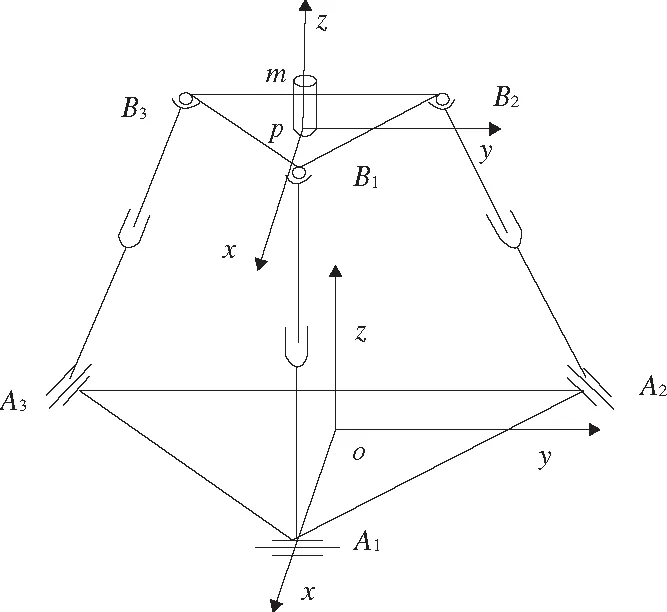
图2 并联部分结构简图
1 运动学分析
1.1 平台描述
由于运动平台的工作环境较为恶劣,需要较大的刚度,运动平台的工作空间影响着平台的动力学性能,也决定着运动平台的使用范围。运动平台末端执行器的精度越高,平台的控制就越精细,累计误差越小。综合以上需求,研究设计了一种新型混联运动平台,具有结构新颖性和功能新颖性。
结构的新颖性:转台的回转机构由回转支撑机构和回转驱动装置组成。运动平台工作环境恶劣,对支撑结构的冲击较大,所以支撑机构的强度必须满足需求。滚子夹套式机构具有重心低、稳定性高、制造和安装简单等优点[3]。设计的回转支撑机构采用滚子夹套式机构。齿轮机构具有效率高、传动比稳定和结构紧凑的特点,所以采用齿轮传动机构作为回转驱动装置。在回转机构的基础上,在转台上安装3-RPS机构,为整个平台提供更多的自由度且结构紧凑。
功能的新颖性:相比3-RPS机构,增加回转机构后,新型混联运动平台末端执行器能够执行更复杂的空间曲线、能够更真实的反应运动情况。根据运用场合的不同,在转台上安装不同的设备,可构成不同的运动平台,如汽车驾驶仿真平台。回转机构实现平台的自转,如实现汽车驾驶仿真平台的甩尾运动;并联机构实现平台的z向移动和绕x、y轴的转动,如实现汽车驾驶仿真平台的竖直运动、俯仰运动和侧翻运动[4]。
1.2 位置反解
新型混联运动平台的运动学逆解求解分两步,首先求解串联部分的姿态变换矩阵,再求解并联部分的姿态变换矩阵。
末端执行器的空间位置可以分解为:o-x0y0z0到o-x1y1z1的旋转变换、o-x1y1z1到p-x2y2z2的旋转变换和平移变换[5-7]。整个变换过程,坐标系的位置变化如图3所示。坐标系o-x0y0z0到o-x1y1z1的姿态变换矩阵为T01,如式(1)所示。
(1)

图3 运动平台的坐标变换
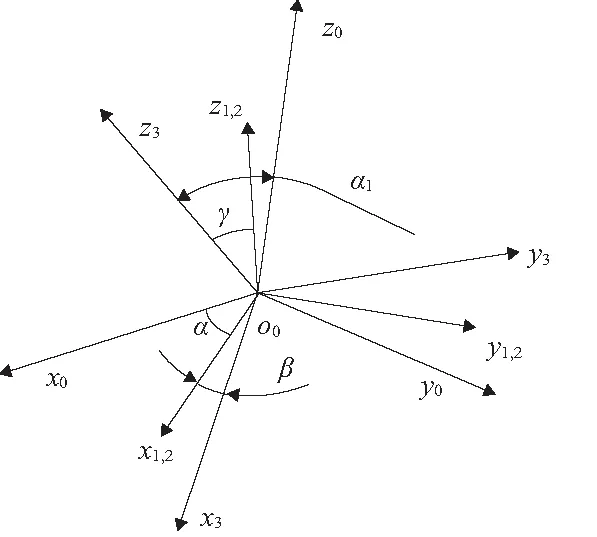
图4 欧拉角z-y-x坐标系变化
r和R分别为并联部分的上下平台的外接圆半径。根据图2中铰链和球铰与对应坐标系的关系,解出A1、A2、A3在o-xyz中的坐标Ai和B1、B2、B3在p-xyz中的坐标bi分别如下:
o-x1y1z1到p-x2y2z2的旋转变换可用z-y-x欧拉角(α,β,γ)表示,如图4所示。用z-y-x欧拉角表示的姿态变换矩阵为T12,如式(2)所示。
(2)
其中:sα=sinα,cβ=cosβ,以此类推。
根据欧拉角姿态变换矩阵即可求得Bi的世界坐标系坐标:
(3)
电动缸与转台之间以铰链连接。由于铰链结构特性,电动缸只能绕着定轴转动,那么电动缸所扫过的空间为一个扇形平面。同理,3个球铰只在3个固定扇形平面内运动,3个平面方程如式(4)所示。
(4)
根据式(2)-式(4),解得并联部分的位姿约束方程,如式(5)所示。
(5)
由式(5)可以看出:进动角α是自转角β和章动角γ的函数,也证明了并联部分只有2个转动自由度。
根据式(1)和式(2),计算出整个运动平台的姿态变换矩阵为T02,如式(6)所示。
(6)
其中:
为校验所得到的T02正确性,将平台的初始位置:θ=0,α=0,β=0,γ=0,xp=0,yp=0,zp=H,带入矩阵T02计算,计算结果为:
与新型混联运动平台的初始位置完全一致,计算结果正确。
在实际使用中,针对不同用途,可以在动平台上方安装不同的设备,如汽车驾驶仿真平台,这将导致动平台的质心不在动平台下表面中心处。假设:动平台的质心在动平台以上的M点处,将M点设为动平台参考点。那么,M点的世界坐标系坐标的表示方法,如式(7)所示。
(7)
其中,m为参考点M在p-xyz中的坐标。
1.3 位置正解
根据电动缸的总长度Li、各电动缸轴线与转台的夹角φi和转台自转的角度θ,采用立体几何法,可解出动平台参考点的世界坐标系坐标。根据已知条件,求解出动平台B1、B2和B3的世界坐标系坐标,如式(8)所示。
(8)
则,上平台中心点P的坐标如式(9)所示。
P=B1+B2+B3
(9)
上平台所在平面的法向量:
(10)
点M位于通过P且与动平台垂直的空间直线上,直线方程如式(11)所示。
(11)
|PM|=h,即可求出动平台参考点M绕z轴旋转之前的世界坐标系坐标。转台转动的角度θ,将其带入式(1),解得末端执行器参考点在世界坐标系的坐标如式(12)所示。
(12)
2 工作空间
工作空间是指末端执行器所能够达到的空间目标的集 合[8]。研究工作空间有利于避免末端执行器与其他部件发生干涉,还能够为平台的控制提供数据基础。
混联运动平台的几个重要设计参数:R=500mm,r=300mm,Lmin=654mm,Lmax=1 152mm,h=300mm。采用数值搜索法,在MATLAB中编写相应的程序,计算出动平台参考点M的工作空间,如图5所示。将其与3-RPS机构的工作空间进行对比。当y=0时,将两种机构工作空间的xz截面对比,如图6所示。

图5 混联机构的工作空间

图6 两种机构的xz截面对比
在MATLAB中,混联机构的工作空间呈现两头尖的锥形分布。根据工作空间截面对比图,表明混联运动平台的工作空间比单一的并联机构的工作空间大,混联运动平台的工作空间在各个方向上都达到了3-RPS的径向极限位置。
3 动力学分析
在ADAMS中,使用“一般点驱动”和“样条函数驱动”功能,实现运动平台的运动。并联部分的移动副采用样条函数驱动,串联部分的转动副采用STEP函数驱动。
在ADAMS动力学仿真中,整个过程持续10s,分作300步。每个电动缸的铰链中心到球铰中心的距离为电动缸总长Li,Li的变化曲线如图7所示。
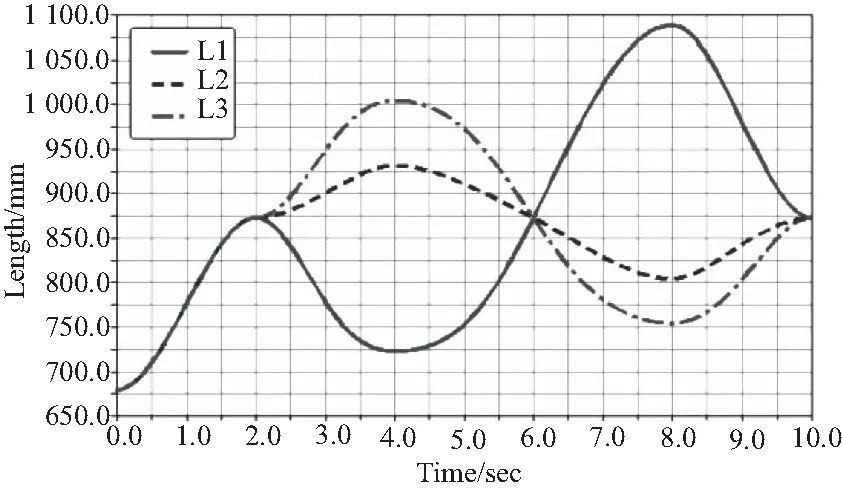
图7 3个电动缸总长变化
根据ADAMS后处理,获得电动缸总长、自转角、球铰和铰链的夹角变化。利用1.3节中的位置正解方法,在MATLAB中编写位置正解程序,计算新型混联运动平台的参考点坐标。将计算值与仿真值进行比较,得出参考点误差分析图,如图8所示。

图8 参考点误差分析图
由图8可以看出,xyz向误差呈现一定的波动。当3个电动缸总长度在接近相等时,参考点的误差较大,且z向的误差最小。在xyz方向上,参考点的误差在4×10-5mm以内,误差均在允许的范围内,精度较高,表明运动学方程准确无误。
4 结语
在MATLAB中,根据位置反解算法,分别对3-RPS机构和新型混联运动平台末端执行器的工作空间进行求解。3-RPS的工作空间关于3个铰链约束平面对称,混联机构的工作空间关于中心轴对称。当新型混联运动平台的并联部分与3-RPS机构完全相同时,3-RPS机构的工作空间体积为:V3-RPS=8.313 3×106mm3,运动平台的工作空间体积为:V混联=11.687×106mm3,运动平台的工作空间增加了40.58%。可见,当增加回转机构后,新型混联运动平台末端执行器的工作空间大大增加,体现串联部分的优势。
分析新型混联运动平台的ADAMS动力学仿真数据,结果表明电动缸的长度、铰链夹角和球铰夹角变化都在设定的范围内,末端执行器参考点的空间位置均在工作空间内,表明工作空间求解准确。通过误差分析,表明新型混联运动平台参考点的精度较高,体现并联部分的优势。通过动力学分析,为混联运动平台的优化和控制提供了动力学依据。
[1] 潘璇,王培俊,聂良兵,等. 基于ADAMS的三自由度汽车运动平台仿真分析[J]. 机械传动,2013,37(4):98-100.
[2] 郑东志,郑子龙. 六自由度并联机器人的位置分析及仿真研究[J]. 机械制造与自动化,2016,45(2):163-166.
[3] 高顺德,沈云海,苗明. 滚子夹套式回转支撑轮压均衡方法研究[J]. 起重运输机械,2011 (8):81-85.
[4] 张骁,王培俊,张利斌,等. 四自由度混联运动平台的分析与仿真[J]. 机械设计与制造,2015(10):241-248.
[5] 郑魁敬,崔培,郭海军. 3-RPS并联机构运动与静力特性分析[J]. 机械设计,2011,28(9):28-33.
[6] 朱大昌,严智敏,崔祥府,等. 基于螺旋理论对3-RPS并联机器人运动学分析及仿真[J]. 机械科学与技术,2015,32(1):28-31.
[7] K.M.Lee and D.K.Shah. Kinematic Analysis of a Three-Degree-of-Freedom In-parallel Actuated Manipulators[J]. Proc. IEEE Int.Conf. Robotics and Automation,1987(1):345-350.
[8] 王瑞,刘文涛,纪孝娟. 一种新型串并联机床的工作空间分析[J]. 机械设计,2009,26(5):61-64.
猜你喜欢
湖南电力(2022年3期)2022-07-07
科学大众·教师版(2021年9期)2021-09-05
湖北农机化(2020年22期)2021-01-18
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2019年7期)2019-07-22
电子制作(2018年17期)2018-09-28
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年9期)2017-11-27
自动化学报(2017年2期)2017-04-04
自动化学报(2016年8期)2016-04-16
