
无损大量程张力传感器的有限元分析
2018-07-04 05:58马敏毓赵敏
机械制造与自动化 2018年3期
马敏毓,赵敏
(南京航空航天大学 自动化学院,江苏 南京 210016)
0 引言
重装空投测试系统是一种广泛用于军用及民用的复杂的投放系统,空投时大气数据、飞机的飞行状态、载荷质量、投放方式、降落伞类型等各种因素都会对空投系统的性能产生影响。其中,翼伞作为精确重装空投系统中必不可少的一部分,其伞带的受力分析对空投动力学的模型建立提供重要参数,也是影响飞机动态响应的主要因素[1]。因此,需要一个用于重装空投的翼伞伞带的张力传感器,进行载荷的实时测量,为进一步空投系统和飞机控制系统的设计提供参考依据。
目前国内外专门针对翼伞伞绳张力测量的传感器较少,市面上可借鉴的有扁平带式拉力传感器,如日本KYOWA共和的LBT-A-20KNSA1和美国精量MEAS的EL20-S458等,其量程范围基本在2 t左右,而且无法自行拆卸。另外像钢丝绳张力传感器及吊钩秤测力传感器,如宁波柯力吊钩秤测力传感器,其量程可满足,但是无法实现扁平带状结构的非破坏测量。
针对目前市场上的传感器在重装空投试验系统中伞带张力测量时的不足,设计研制一种特殊结构的大量程张力传感器,其量程可达25 t,除了能够满足重装空投的量程要求,还能够实现对扁平伞带无损的测量,安装方便,对降落伞开伞操作没有影响。针对所设计的无损张力传感器结构,通过ANSYS workbench14.5进行有限元分析。在量程范围内,对其进行受力形变的模拟,首先给出不同受力状况下传感器整体结构的受力分布情况,并确保其满足25 t量程的强度要求,其次对应变片进行建模仿真,得到传感器输入-输出的理论上的特性表达式。通过传感器的测量实验,验证本文所采用的有限元分析方法有效性及正确性。
1 设计原理
1.1 测量原理
电阻应变式传感器仍以其较高的测量精度和稳定性的特点在众多应力应变测量中获得广泛使用[2]。在借鉴钢索张力测量时常采用的旁压式测量原理的同时,结合扁平带状的结构设计,设计了如图1所示的无损张力传感器结构。
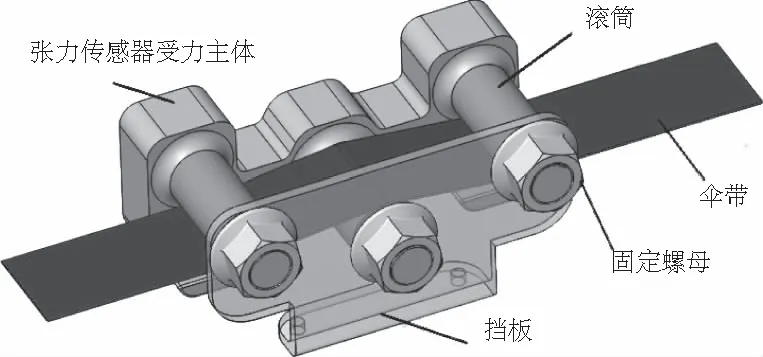
图1 传感器整体结构示意图
传感器整体由3轴受力主体、滚筒、挡板以及固定螺母组成。其中,受力主体中3个导力圆柱间2个受力梁是承载伞带张力传递的主要弹性结构;滚筒能够有效地减小摩擦以避免大张力突变情况下伞带烧蚀现象,实现伞带的无损测量;挡板及固定螺母起到了对伞带及传感器的固定作用。其具体工作过程是:当伞带受力绷直时会引起传感器受力主体的变形,从而引起粘贴在受力梁上的电阻式应变片阻值的变化,再通过电桥将应变片的形变转化为电信号的输出。
1.2 传感器受力分布分析
为保证大量程张力传感器结构的可靠性,一方面需考虑高弹性应变时的超载荷能力,另一方面考虑在低弹性应变时应具有蠕变小、稳定性高等特点,采用的材料最终选择为42CrMo。该材料属于超高强度钢,具有高强度和韧性的特点,常用在负荷较大、可靠性较高的零部件。其力学特性如表1所示。

表1 42CrMO力学特性
在进行有限元分析时,将无损张力传感器受力主体为主要研究对象,伞带以Ω型穿行于传感器3个导力圆柱间,具体见图2所示。当伞带两端受拉力作用时,伞带绷直对传感器3个受力轴分别有压迫作用,从而带动传感器弹性结构形变,因此需要建立正确的力学模型进行仿真。本文所设计的无损张力传感器通过角度转换[3]的方式,有效减小施加在传感器上压迫力,可实现用较轻薄的结构满足重装空投25t级张力的测量。

图2 伞带传力模型示意图
伞带张力T传力模型具体可给出的数学关系为:
(1)
可见,α值越小,施加在传感器上等效力就越小且伞带接近于拉直状态,在拉直过程中,伞带与传感器接触面积可视为不变。考虑到张力传感器3个导力圆柱上套有一定厚度的滚筒,则公式(1)中α值大小采用8° 较为合理。图3为翼伞伞带与张力传感器接触示意图,图中的阴影面积S1、S2、S3为翼伞伞带和传感器的接触面积。根据式(2)可得出具体施加在传感器上的压强P,由此就可将伞带上的张力转化为对传感器的压强加载。
(2)

图3 伞带与传感器接触示意图
首先对弹性体进行初步的受力分析,以5t为间隔,分5个载荷步实现力的加载,总量程为25t,受力云图如图4所示。应力分布图显示出应力较平均的分布在两侧受力梁上,最大的应力即颜色较浅的高亮处,产生在中间的导力圆柱与受力梁的结合处,由表2可知,在25t时最大应力远小于材料的屈服强度,说明整体结构可满足强度要求,即测量张力的量程理论上可达到25t。

图4 弹性体应力云图

表2 各载荷步最大应力
1.3 应变片的贴片方式及建模分析
张力传感器的最佳贴片方式的选择经常采用“应力集中”原则[4],即在保证应变片所受的应变与弹性体所受的载荷保持严格的对应关系的同时,尽可能选择具有更高应变水平的部位来粘贴应变片,从而提高传感器的灵敏度。
在张力传感器实际的应用中,一方面,伞带在弹性体上的作用点会发生变化,另一方面,弹性体与伞带间的接触条件也会发生变化。在这样的条件下,应变片贴片部位的应力与被测力并不能保证严格的对应关系,将造成明显的测力误差。为减小这类误差,在张力传感器承载强度足够的条件下,采取在受力臂上打盲孔的方式,具体见图5 (b),从而代替传统的直接将应变片粘贴在梁表面的形式,见图5 (a)。图5(c)与图5(d)表明,盲孔法有效地使应变片贴片位置的应力分布受到盲孔的约束,集中分布在贴片检测的部位,迫使贴片部分的应变按规律分布,从而减小误差。另一方面,这种盲孔法贴片还可以将应变片及其接出的引线进行有效保护,避免空投中恶劣的环境对应变片测量准确性产生的影响。



图5 盲孔法贴片分析
从图5 (d)中也可看出,盲孔这种突变的结构会引起应力集中,通过这种方法可以将应力引导至合适的位置来粘贴应变片。
张力传感器上具体的贴片位置如图6所示,其中位置1处为靠近3个受力轴的所在面,位置2处为背离受力轴的所在面。由于在传感器标定时采用的应变片是一个矩形片,而不是一个点,为了提高有限元模型求解的准确性,在对应应变片贴片位置处按照应变片的实际大小和形状单独划分网格,如图7所示。应变片拟采用型号为BE650-4BB(11)的应变片。其特点是“T”型应变计,两栅互相垂直,见图7 (a),主要用于测试轴向应变和横向应变,也称为泊松应变,在图7 (b)中以轴向测量面积来模拟应变片的水平栅测量范围,以横向测量面积来模拟垂直栅的测量范围[5]。

图6 应变片贴片示意图



图7 应变片有限元模型

图8 拟采用的测量电路
根据四等臂电桥原理,可得:
(3)
其中:
(4)
即:
(5)
有限元仿真分析的加载过程为从0kN开始,以50kN 的差值递增,直至250kN,共分为5个等级加载,分别测出相应的轴向应变与横向应变。研究中采用测量面积内所有节点的平均应变作为应变片的测量应变值[7],仿真数据的汇总见表3所示,其中负值表示应变片所受为压缩应变。

表3 盲孔中心位置应变片的微应变
由于应变量绝对值的大小最小可以测量到1με的变形量大小,通过表3可看出应变片贴在盲孔中心位置时可以有效反映受力梁形变值,并且在理论上,该传感器能测量不低于1 000N的张力值[8]。图9直观地显示了张力值与应变值的对应关系呈线性变化,理论上该传感器的线性度较好。
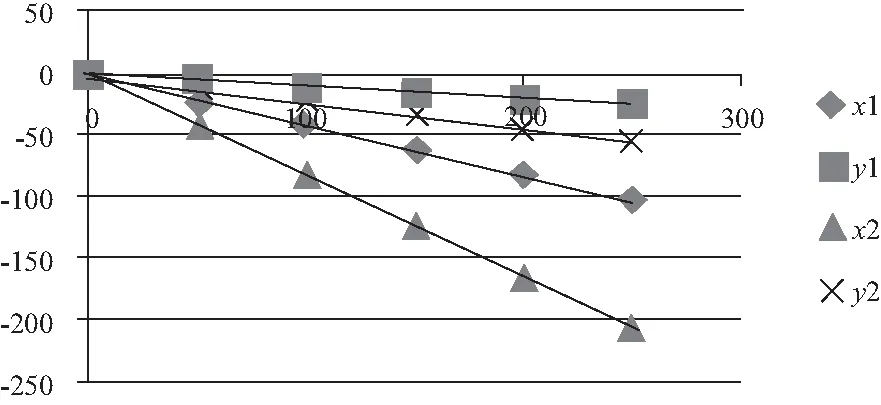
图9 应变片数据及其拟合曲线
根据拟合直线,可得到盲孔中心位置处载荷与应变之间的对应关系:
(6)
其中,εx1、εy1分别表示位置1处的轴向及横向应变,εx2、εy2为位置2处的应变,F表示伞带张力,单位为N。
将式(6)代入式(3)中,并且取灵敏度系数K=2,输入电压U=3 300mV,则可获得传感器输出电压与伞带张力值之间的关系表达式,即:
Vout=3.3×10-5F-1.04×10-7
(7)
其中,Vout为传感器实际输出电压值,单位mV,F表示伞带张力,单位为N。
综上所述,通过有限元法,基于“应力集中”原则,确定采用盲孔法作为应变片贴片方式;通过建立应变片有限元模型,可进一步给出传感器弹性体加载力与应变值之间的对应关系,从而获取理论上张力传感器输出电压与伞带张力间的关系表达式。上述有限元仿真方法可通过与后续实验数据进行对比验证。
2 实验过程及结果分析
2.1 实验方案
采用实验结果与仿真结果相对比的方式来验证上述仿真方法的可行性。具体实验装置采用CMT5105的拉力机,该拉力机专用于降落伞强度测试,可提供的标准力最大为100kN。张力传感器的伞带可承受250kN拉力。考虑到拉力机本身可提供的最大拉力,将实验满量程设定为80kN,可确保拉力机输出精确的拉力值。
实验过程中,伞带以S型穿过张力传感器,伞带两端通过拉力机的夹持装置将张力传感器悬吊固定,如图10所示。拉力机通过对伞带的拉伸,产生标准力作用于传感器,后续采用毫伏级电压表记录传感器相对应的输出电压值。整个实验过程,拉力机拉伸伞带,拉力从零加载至满量程后,再依次卸载至零,完成一次完整的测量。

图10 传感器测量实验
2.2 实验分析
实验的具体加载过程为从0kN开始,以2kN的差值递增,直至80kN,共分为40个等级加载,分别记录经放大后的传感器输出的电压值,其中放大倍数设定为105倍。
张力传感器一次测量实验数据如图11所示,其中由于伞带与传感器之间仍旧存在的摩擦力,以及拉力试验机本身在反行程时给出的数据的不确定性导致反行程与正行程存在一定偏差。
经过多次传感器的测量实验,采用平移端基直线法对传感器特性进行分析,并且给出传感器输出电压值与伞带张力值之间的关系:
Vout=3.475×10-5F+44.375
(8)
其中,电压输出Vout单位为mV,伞带张力F单位为N。并且可得出,未经放大前传感器输出电压值与伞带张力值之间的关系:
(9)
将式(9)即传感器输入-输出关系式,对比于通过由ANSYS仿真而得的理论数据式(7),两者相符合,误差在可接受范围内。可见本文所提出的应变片模型及有限元分析方法的正确性,以及其具有的实际指导意义。一方面,可以保证传感器结构设计的合理性;另一方面,可以从理论上给出传感器输入输出特性的一元线性回归方程,有效避免复杂结构带来的复杂数学公式推导。
3 结语
研制一种用于重装空投中翼伞伞带的张力传感器,该传感器量程大,可达250kN,拆卸及安装便捷,不会破坏伞带组织结构。结合有限元方法设计传感器的弹性体结构,通过有限元法给出的应变分布特性,确定通过盲孔法实现应变片的粘贴,该技术一方面有效地保护应变片及其导线,另一方面能够显著提高应力水平,提高测量灵敏度。另外,将应变片结构及贴片位置以轴向与横向测量面积构建有限元分析测量模型,通过对比ANSYS workbench理论分析出的结果与传感器实际实验结果,表明该模型可以正确反映应变片变形,给出正确的理论依据,可以为将来传感器的进一步研究提供参考。
[1] 黑文静,林皓. 重装空投出舱过程对飞机动态响应的影响[J]. 系统仿真学报, 2008(S2):345-347.
[3] 翟庆光,聂杰, 康岳伟. 深海取样绞车牵引卷筒上钢缆张力分析[J]. 海洋技术, 2008(2): 28-30.
[4] 孔扬. 对电阻应变片式测力传感器“应力集中”的探讨[J]. 新校园(上旬), 2015(11): 62-65.
[5] 胡玉梅. 应变片敏感栅结构参数对测量精度的影响[J]. 重庆大学学报, 2013(12): 21-27.
[6] 吕泉. 电桥电路对应变片电测法的影响[J]. 鞍山师范学院学报, 2004, 6(4):23-24.
[7] 杨君琦. 应变传感器的应变传递理论及传感特性研究[D]. 长沙:中南大学,2013.
[8] 杨奕. 微型电子秤用传感器的研制[J]. 常州工学院学报, 2006(4):9-12,42.
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
煤气与热力(2021年4期)2021-06-09
装备制造技术(2020年4期)2020-12-25
航天制造技术(2020年3期)2020-07-16
东西南北(2019年6期)2019-04-30
基础医学与临床(2018年11期)2018-02-13
小康(2017年34期)2017-12-08
通信电源技术(2016年1期)2016-04-16
印制电路信息(2015年6期)2015-12-30
印制电路信息(2015年3期)2015-02-05
