
直角坐标码垛机器人控制系统的设计
2018-07-04 05:58柏甫荣
机械制造与自动化 2018年3期
柏甫荣
(扬州大学 机械工程学院,江苏 扬州 225127)
0 引言
工业机器人是面向工业自动化领域的多自由度机械手或多关节的机器装置,它能够自动执行工作,是靠自身动力系统和控制系统来实现各种功能的一种机器装置。它可以接受人类的调度指挥,也可以按照预先编制的程序去运行,现代化的工业机器人还能根据人工智能技术制定的原则纲领去执行[1-2]。工业机器人按照机械机构行使主要分类为关节型机器人、水下机器人和直角坐标机器人等。直角坐标机器人作为工业机器人的一种,被广泛的应用在制造业行业,它主要以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴、Y轴和Z轴,3个轴都是主动轴,且各个直线运动轴之间的夹角为直角,一般X轴和Y轴布置在水平面上,Z轴是上下运动轴,共可以提供3个自由度,完成空间点的自由定位,如图1所示。根据实际生产应用情况,如果完成指定的动作需要多个自由度,可以在Z轴末端加上多个旋转轴和摆动轴,确定末端的姿态以适应不同的应用需求,可以完成焊接、包装、码垛等制造业中常见的工作。直角坐标机器人通常由机械结构、动力驱动系统和控制系统等组成。
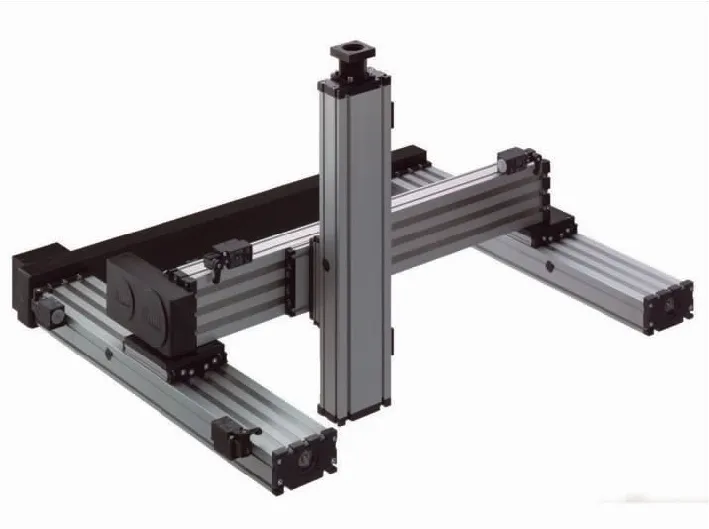
图1 龙门式直角坐标机器人
直角坐标机器人定位精度高,重复定位精度可以达到0.01 mm~0.05 mm;负载能力强,单根直线运动单元的最大负载为200 kg,当采用多滑块刚性连接时,直线运动单元承受最大负载可以增加6~10倍;行程比较大,龙门式单根直线运动单元的行程最大是6 m,还可以用多根直线运动单元方便的组成超大行程;对比关节型机器人,直角坐标机器人外形直观,而且生产成本低,方便操作人员日常维护和使用[3-5]。鉴于直角坐标机器人以上的种种优点,在工业机器人自动化装备的选择中,直角坐标机器人应当是首选。
目前,国内外机器人生产厂家针对直角坐标机器人整体机构和直线运动单元进行了比较系统的研究分析,设计出了直线运动单元模块,并且针对直角坐标机器人形成了非常成熟的非标准设备机械方案。但是传统的直角坐标机器人的控制系统基本上都是开发者对于自己独特的机械设计结构而进行开发设计的,这样的控制系统通常采用了专用的机器人编程语言、专用的处理器等专用的结构体系。这种专用化的控制系统已经不能满足现代工业自动化发展的小批量、多品种要求。
因此,柔性化和开放性是直角坐标机器人控制系统的重要发展方向,本文旨在研究一套高性能、高柔性化的开放式直角坐标机器人运动控制系统,满足现代化装备制造业的发展要求。
1 直角坐标码垛机器人功能要求
随着机器人技术的高速发展,对机器人的控制系统提出了更高的要求,要求各种机器人能够相互协作,要求更好的操作性、更好的兼容性和开放性。因此,直角坐标码垛机器人要实现如下基本功能:
1)以脉冲的方式提供对各个模组电机驱动器的控制,实现S形平滑曲线的加减速过程,并控制好运动节拍,使设备与流水线在时序上协调同步;
2)控制系统提供多路扩展的I/O端口,为用户提供可以扩展设备的通道;
3)分模块编写程序,实现查找故障快速定位;
4)人机界面中要有安全模块和故障诊断模块,实现按照用户等级开放数据块[6]。
2 直角坐标码垛机器人控制系统设计
直角坐标码垛机器人控制系统提供系统控制器,I/O现场总线接口,控制I/O模块中的传感元件、控制按钮和执行元件,直角坐标码垛机器人中集成更多的外部传感器,如视觉传感器、压力传感器等,以提高直角坐标码垛机器人在实际应用中的智能化;控制系统连接驱动器,控制电机驱动码垛机器人的各个关节运动;控制系统还可以实现和人机界面的实时通讯,实时反馈各工作元件的工作状态,并实现自诊断功能,直角坐标码垛机器人控制系统的整体结构如图2所示。

图2 控制系统整体结构
2.1 控制系统
直角坐标码垛机器人控制系统的核心是系统控制器,通常选用数控系统、PLC或加运动控制卡的工控机来做控制系统。PLC(programmable logic controller,可编程逻辑控制器)是一种专门在工业系统环境下应用而设计的数字式运算操作的电子装置[7]。PLC使用可以编制程序的存储器,用在内部存储执行逻辑运算、顺序运算、计数、计时和算术运算等操作的指令,并且能够通过数字式或者模拟式的输入和输出,来控制各种类型的机械装置或生产过程,符合直角坐标码垛机器人的控制要求;由于PLC具有能耗低、体积小、编程简单、经济性好、安全可靠等优点,在当代的工业控制领域中,以PLC构成的自动化控制系统占有相当大的份额[8]。因此,本文选用可编程逻辑控制器作为直角坐标码垛机器人的系统控制器。
2.2 PLC控制程序
为了设计出符合开放式结构的机器人控制系统,直角坐标系码垛机器人的PLC控制系统必须能够实现模块化的编程,把整个控制程序按照功能分成多个子程序,每个子程序为一个独立模块,使每一个模块的工作变得简单而明确。整个程序包括7大模块:手动操作模块;自动运行模块;伺服电机控制模块;人机交互模块;I/O模块;安全模块;自诊断模块。由于模块相互独立,因此在设计其中一个模块的时候,不会受到其他模块的影响,因此可以将原来较为复杂的问题简化为一系列简单模块的设计。程序中的7个模块根据控制系统要求设置优先级,充分体现了“分时多任务”的优越性,同时还能够保证良好的维护性和清晰的结构框架。
在直角坐标码垛机器人中,每个轴关节由配置有增量式编码器的交流伺服电机驱动。伺服驱动部分根据安装负载的要求选用伺服驱动器,本文以台达伺服驱动器为例,台达伺服驱动器的主要特征是:操作安全、调试方便;具有过流、热保护装置;能耗低等。台达伺服驱动器与PLC、伺服电机的接线如图3所示,台达伺服驱动器有一个内置的制动器功能,用于保证设备安全停机并避免重新的意外启动,通过这种方式,台达伺服驱动器控制的电机就不会产生旋转运动。

图3 台达伺服驱动器接线图
2.3 人机界面的设计
直角坐标码垛机器人的人机界面作为使用者与其沟通、传达和接收信息的一个接口,是机器实现自动化控制很重要的一部分。人机界面可以使直角坐标码垛机器人系统变得更直观、更方便、多功能,使操作人员轻松的发现并解决机器故障,并根据提示完成预防性维护。
直角坐标码垛机器人的人机界面功能丰富,其功能结构如图4所示,主要包括运行画面、参数设置和辅助操作三个一级界面,还有一系列的弹出式报警窗口,报警窗口对运行过程中可能出现的故障和解决方法做详实的说明,能够使操作人员根据说明很快很准确地解决问题。

图4 人机界面结构框图
3 末端执行器气动控制系统设计
根据直角坐标码垛机器人的应用场合,选择合适的末端执行器。如果直角坐标码垛机器人用于表面光滑物体的搬运码垛,如板材和箱体等,或者用于对工件表面要求特别严格的场合,末端执行器可以使用真空吸盘,通过吸盘和物体表面产生的负气压抬升物体,其气动控制原理图如图5所示。如果直角坐标码垛机器人用于不规则物体的搬运码垛,如袋状物和瓶装物等,或者真空吸盘在这些物体表面不便产生负气压,末端执行器可以使用气缸控制的夹爪,其气动控制原理图如图6所示。

图5 吸盘气动控制原理图

图6 气缸气动控制原理图
4 结语
结合当前码垛机器人控制方案和码垛机器人功能需求以及技术需求,本着经济性、高效和通用性好的原则,设计了基于PLC的直角坐标码垛机器人控制系统。针对码垛机器人系统的基本要求,设计了控制系统的硬件结构,而且系统中集成更多的传感器,实现直角坐标码垛机器人在实际应用中的智能化;实现了控制程序的模块化编程,保证控制系统有清晰的结构和良好的维护性;设计了具有安全模块和自诊断功能的人机界面,使操作人员能够快速解决现场故障。
[1] 魏明哲. 机器人自动制孔控制系统软件开发[D]. 杭州:浙江大学硕士学位论文,2012.
[2] 马福元. 可编程控制器在捆扎机自动控制中的应用[J]. 石油化工自动化,2006(3):74-75.
[3] 汤嘉荣. 浅析我国工业机器人的发展与研究[J]. 科技创新与应用,2012(32):94-95.
[4] 王炎欢,陈阿三,刘鑫茂. 直角坐标机器人控制系统的研究[J]. 轻工机械,2010,28(4):67-69.
[5] 薛浙瀛. 基于PLC技术的码垛机器人控制系统研究[J]. 设计与分析,2013(12):154-155.
[6] 张丰华,韩宝玲,罗庆生,等. 基于PLC的新型工业码垛机器人控制系统设计[J]. 计算机测量与控制,2009,19(11):2191-2196.
[7] 张桂玉. PLC在自动传送系统中的应用[J]. 机床电器,2009(4):39-41.
[8] 张志远,李琪,毕海深. 基于直角坐标机器人的软袋再包装自动上料系统[J]. 制造业自动化,2012,34(2):11-14.
猜你喜欢
智能制造(2021年4期)2021-11-04
装备制造技术(2020年3期)2020-12-25
重型机械(2020年3期)2020-08-24
电子制作(2019年20期)2019-12-04
中国教育信息化(2018年22期)2018-11-28
——“绿筑迹 ——台达绿色建筑展”台达记者会
制造技术与机床(2016年7期)2016-08-31
铁道通信信号(2016年1期)2016-06-01
铁路通信信号工程技术(2015年4期)2015-02-28
自动化博览(2014年10期)2014-02-28
自动化博览(2014年6期)2014-02-28
