
微电网电源的虚拟惯性频率控制策略初探
2018-07-10 02:54吴萍
山东电力高等专科学校学报 2018年3期
吴 萍
(三门峡职业技术学院,河南 三门峡 472000)
0 引言
分布式电源和可再生能源在电网中的有效接入,是当前发电技术主要研究方向,而作为由分布式电源等装置组成的小型发配电系统,微电网变得越来越常见,加快了我国智能电网的建设步伐。但是,在微电网实际运行过程中,仍存在较多的技术问题有待解决,尤其是在孤岛运行模式下,其频率抗扰动能力较差,而传统下垂控制策略存在一定的局限性,发生扰动时会对逆变器输出频率造成影响,无法保证其稳定性,不利于微电网的有效应用。所以,当前亟需一种新型控制策略来增强微电网惯性,减弱功率振荡的影响,提升微电网稳定运行能力。
1 微电网简介
在对微电网孤岛运行模式频率稳定性的有效控制展开研究之前,应先提高对微电网的深刻认识,为控制策略的优化和改善提供理论依据。微电网又叫微网,其本质为小型发配电系统,具体组成包括分布式电源、储能装置、监控装置、保护装置、能量转换装置等[1]。微电网可以更加灵活、高效地将分布式电源应用到电网中,有效解决其并网问题,在节约非再生资源、推动智能电网建设等方面发挥着重要作用,且具有成本低、污染小等优点,在电力生产中的应用越来越广泛。
2 微电网电源下垂控制策略
下垂控制策略是微电网运行较为常用的一种控制方式,当电源输出为有功功率和无功功率时,分别对频率和电压进行控制会表现出下垂特性。具体操作过程中,通过下垂控制,根据电源输出的有功功率和无功功率,结合其各自控制模块中的下垂系数,可以分别得到参考频率和参考电压幅值。然后再利用参考频率积分得到参考相位,借助参考电压幅值得到其瞬时值。对于微电网电源控制来讲,在采用下垂控制策略时,配合双环控制策略,可以实现闭环控制效果。在不考虑双环控制响应时间前提下,如果用ω表示电源频率,用Δω表示频率增量,用P表示电源功率,用ΔP表示电源功率增量时,则可以得到:

在微电网中接入电源时,基本都是借助逆变器实现的,而逆变器能够瞬时完成响应,响应时间一般仅有几十毫秒。如果微电网电源控制方式为下垂控制策略,则逆变器频率会因为扰动而发生快速变化。根据上式的阶跃特点可知,即便是逆变器发生轻微扰动,也会造成较大影响,无法保证微电网频率稳定性,难以实现良好控制效果。此时微电网的惯性仍然较弱,不利于其良好运行的实现,以及应用优势的充分发挥[2]。由此可见,下垂控制策略存在较大的局限性,必须探索一种新的控制方式,来改善微电网电源控制现状。
3 微电网电源虚拟惯性频率控制策略
此次研究中所提出的虚拟惯性频率控制策略,是针对传统下垂控制策略不足所提出的一种改良方法。可以通过对控制器参数进行优化,尽可能地避免微电网电源振荡现象的发生,能够实现更加理想的控制效果。虚拟惯性频率控制策略在微电网中的框架结构如图1所示。
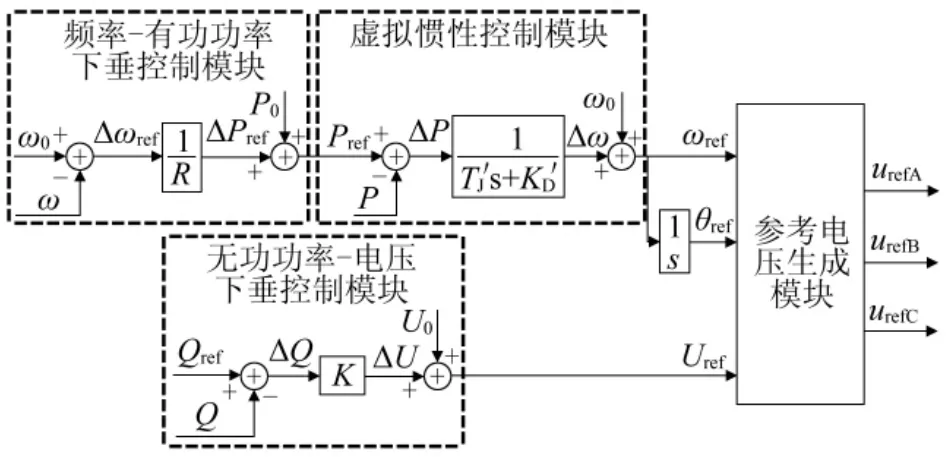
图1 虚拟惯性频率控制策略示意图
根据图1可知,微电网电源虚拟惯性频率控制方式主要分为4个模块,除虚拟惯性控制模块外,还包括两个下垂控制模块,分别为频率有功功率模块和无功功率电压模块,以及电压信号生成模块。4个模块在微电网运行控制过程中,分别发挥着不同作用。首先,虚拟惯性控制模块的主要功能是对频率变化动态过程加以控制,根据有功功率参考值与电源实际输出功率大小,在发生一个惯性环节后,利用两者之间的差值,确定频率偏差大小。如果功率大小出现瞬时变化,则其数值波动可以在惯性作用下得到一定缓冲,通过过渡逐渐趋于稳定,达到一个新的数值。在虚拟惯性控制模块中,模拟发电机转子运动方程的时间常数用T′J表示,其阻尼系数用K′D表示。其次,借助微电网中的频率有功功率模块,可以得到电源参考有功功率,该模块主要负责分配并列机组间的负荷,并对频率进行静态调节。在控制运算过程中,可采用锁相环对电源频率大小进行测量,继而得到所需数据。再次,在对微电网电压大小作出合理调整,以及科学分配无功功率时,主要是通过无功功率电压控制模块实现的,所能确定的数据主要为电压参考值大小[3]。最后,依据在无功功率电压控制模块中所得电压参考值,可以对其瞬时值大小作出判断,具体在参考电压信号生成模块中完成,然后再将其输入到双环控制单元。逆变器在虚拟惯性控制环节和双环控制环节的响应时间分别为几秒至几十秒和几十毫秒,对两者进行比较可知,双环控制环节响应时间在总的响应时间中占有较小比例,为便于分析,可以不将其考虑在内,此时可以得到微电网电源有功功率频率的闭环控制结构框架图,具体控制形式如图2所示。

图2 有功功率频率的闭环控制示意图

式中:ω和P分别表示电源频率和电源功率,Δω和ΔP分别表示频率增量和电源有功功率增量。该式表示惯性环节,当负荷发生变化时,电源频率稳态偏移程度及动态过渡时间,分别可以通过静态调差系数和惯性时间常数获得。与式(1)进行比较能够得知,电源频率在发生改变时,因为惯性时间常数的存在,则可以留有一定的时间用于缓冲,不会出现瞬时性变化,会以一种较为平稳的方式逐渐出现一个新的状态。如此一来,将会大大削弱负荷变化对频率造成的干扰作用,有效避免了微电网电源振荡现象的发生。
4 微电网电源虚拟惯性频率控制仿真分析
为验证虚拟惯性频率控制策略的有效性及可信性,分别在单机系统和多机并联情况下,对微电网电源运行控制进行了仿真分析,现将试验结果总结如下。
4.1 单机系统运行控制仿真分析
此次研究所用单机系统仿真平台,逆变器接口电源是最为主要的构件,供电系统主电路中,电源出口耦合电感和线路阻抗两者相加所得结果用Z∑表示,表现出感性特征,系统电压为380 V,并用近似法根据恒阻抗模型得到系统负荷Zioad。同时,微电网中还用到同步发电机,其调差率的标幺值大小与调速器有关,受到影响后在0.01~0.06之间变化。为保证负荷分配的合理性,协调逆变器接口电源和同步发电机两者的稳定运行,分别将微电网电源惯性时间常数及调差率标幺值设定为8 s和0.02。
为分析负荷不同变化状态下对频率所造成的影响,反仿真试验时分别进行了3次运算,负荷分别为阶跃状态、有功冲击状态和随机变化状态。第一,当负荷呈阶跃式变化时,在10 s内使初始阶段的额定功率阶跃至1.5倍大小,得到对应的频率变化曲线图,如图3所示。通过分析可以发现,当负荷呈阶跃式变化时,采用下垂控制策略和虚拟惯性控制策略,频率均会降低,但是两者的相应时间分别约为0.1 s和15 s,前者会发生瞬时性改变,而后者变化则是一个缓慢的动态过程[4]。由此可知,虚拟惯性控制策略对频率下降起到了延缓作用,即便是出现扰动,低频减载装置切负荷时也会有充足的时间,并且频率稳定后其大小不会超出规定值。第二,基于微电网自身较小电容特点,有功功率可能会对负荷造成冲击,此时频率将会呈现出对应的变化。先在10 s内使初始阶段的额定功率阶跃至1.5倍大小,然后经过10 s后使其恢复初始值。分析对应的频率波动曲线,可以发现采用下垂控制策略和虚拟惯性控制策略,频率最小值均为49.55 Hz,并且频率大小都会随着惯性时间常数的增大而继续降低。但是前者频率的变化是瞬时性的,而后者则是缓慢变化,属于一个动态过程。总结可得,微电网电源采用虚拟惯性控制策略,当出现负荷冲击时,系统频率有着较强的抵御能力。第三,假设负荷是随机变化的,其大小在-13.5%和13.5%之间波动,波动周期为0.5 s,得到对应的频率变化曲线。通过分析可以发现采用下垂控制策略和虚拟惯性控制策略,前者频率会因为逆变器快速响应而出现较大幅度变化,严重影响了频率质量,而后者频率会因为惯性时间常数的约束,呈现出平缓波动形态。

图3 负荷阶跃时的频率变化
4.2 多机并联运行控制仿真分析
如果微电网的运行模式为多机并联,采用虚拟惯性控制策略时,需要保证控制参数选择的最优化,避免功率振荡现象的出现。在此以2机系统为例,进行多机并联仿真分析。供电系统主电路电压分别用E1和E2表示,线路阻抗分别用Z1和Z2表示,负荷阻抗则用ZL表示。
根据微电网闭环控制框图,采用线性化处理,得到2机系统的时域方程。通过分析换算用状态空间形式将其表示出来,在通过潮流计算得到2机主线路的输出功率,分别用P1和P2表示。为方便计算,将所得系统状态空间形式进行降阶处理,得到一个二阶系统,求得其特征根[5]。对所得公式进行分析,可以发现阻尼系数、惯性时间常数、自然振荡频率等多项参数,都会对控制效果造成影响,所以必须作出合理选择。设计仿真平台进行试验,根据上述运算过程可求得阻尼比为0.4,满足振荡抑制需求。假设40 kW的初始负荷在15 s后上升至120%,对频率变化曲线进行分析可以发现,2机负荷分配合理,频率在惯性虚拟控制作用下平稳波动,虽然出现轻微功率振荡,但很快得到有效抑制。假设40 kW的初始负荷在15 s后下降至至70%,对频率变化曲线进行分析可以发现,2机负荷分配合理,频率在惯性虚拟控制作用下平稳波动,10 s后趋于稳定。由此可知,在多机并联运行状态下,通过对控制器参数进行优化,提高系统阻尼比,可有效减弱微电网电源功率振荡现象影响。
5 结束语
加大对微电网频率扰动控制策略的研究,通过增强其惯性来提升微电网运行稳定性,对于微电网的推广应用是非常重要且必要的。此次研究所提出的虚拟惯性频率控制策略,改善了传统下垂控制策略的不足之处,可以保证单机系统的稳定运行,同时通过优化控制器参数,还可以抑制多机并联状态下的功率振荡,提高微电网运行稳定性。
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
阅读(快乐英语高年级)(2019年2期)2019-09-10
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
消费者报道(2016年3期)2016-02-28
风能(2016年12期)2016-02-25
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
