
基于CAN总线的激光整平机控制系统
2018-08-07 10:47卜一晨秦海鹏
计算机与现代化 2018年7期
卜一晨,黄 欢,秦海鹏,金 鑫
(江苏师范大学电气工程及自动化学院,江苏 徐州 221000)
0 引 言
近年来,激光整平机广泛应用于农业耕地精细平整、商业地坪铺设和装配式建筑等领域[1-3]。激光整平机控制系统一般采用主从控制模式,从控制器通常选用具有较强数据处理能力的处理器,从而能够对采集的数据进行实时处理,使水平控制系统实现良好的动态性[4]。系统中的其他执行机构,如振动电机、高程调节电机等,需要连接在CAN总线上,通过主控制器实现任务分配和调度[5]。
激光整平机工作时,施工现场噪声大、干扰多。为了实现数据传输的可靠性,主、从控制器之间一般选择CAN总线进行通信[6]。CAN总线采用双线串行通信方式,抗干扰能力强,适用于噪声干扰环境[7]。此外,随着整平机应用领域越来越广泛,传统控制器由于处理速度无法满足要求,性价比越来越低,正逐渐面临被淘汰的危机[8],因此本文采用STM32F407作为整平机主控制器[9],TMS320F28335作为从控制器,通过CAN总线实现两者之间的通信。
1 系统总体设计
整平机系统总体设计如图1所示,控制系统中角度传感器通过RS232串口将实时测量数据发送给从控制器DSP,DSP将原始数据经滤波处理后实现平地铲的调平控制[10],驱动部件使用电推杆。主、从控制器通过CAN外扩收发器连接到CAN总线上,从控制器接收主控制器下达的控制指令并实现控制要求。通过CAN总线,主控制器也可以获取系统中其他执行机构的运动状态。
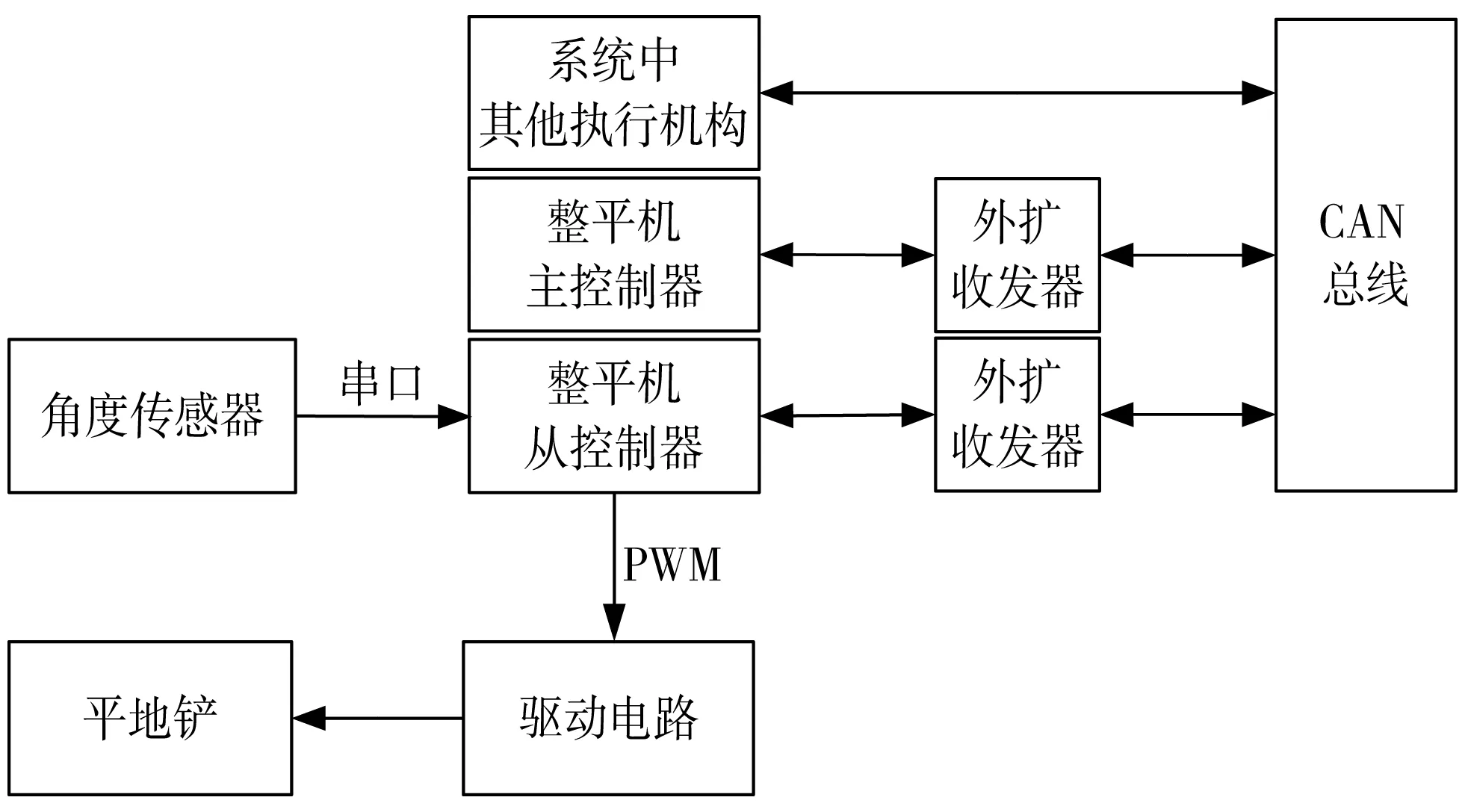
图1 整平机系统总体设计图
2 系统硬件电路设计
2.1 CAN通信模块
整平机中主控制器采用STM32F407,该芯片是基于ARM的32位Cortex-M4内核的通用MCU,具有低成本、低功耗、高性能的特点[11]。STM32F407接口资源丰富,可扩展性强,工作频率最高可达168 MHz,具有哈佛总线结构。此外,该芯片提供2个bxCAN模块,符合本设计的要求。bxCAN控制器拥有3个发送邮箱和3个基于FIFO机制的接收邮箱,接收邮箱具有可配置的筛选器,可用于实现仲裁控制。
从控制器的型号是TMS320F28335,隶属于美国德州仪器公司生产的C2000系列,带有32位浮点运算单元。高达150 MHz的时钟频率和硬件乘法器等结构为传感器数据处理提供了保障[12]。此外,TMS320F28335芯片内部集成的eCAN控制器拥有32个可任意配置功能的邮箱,用于实现优先级的控制[13]。
2.2 外扩收发器模块
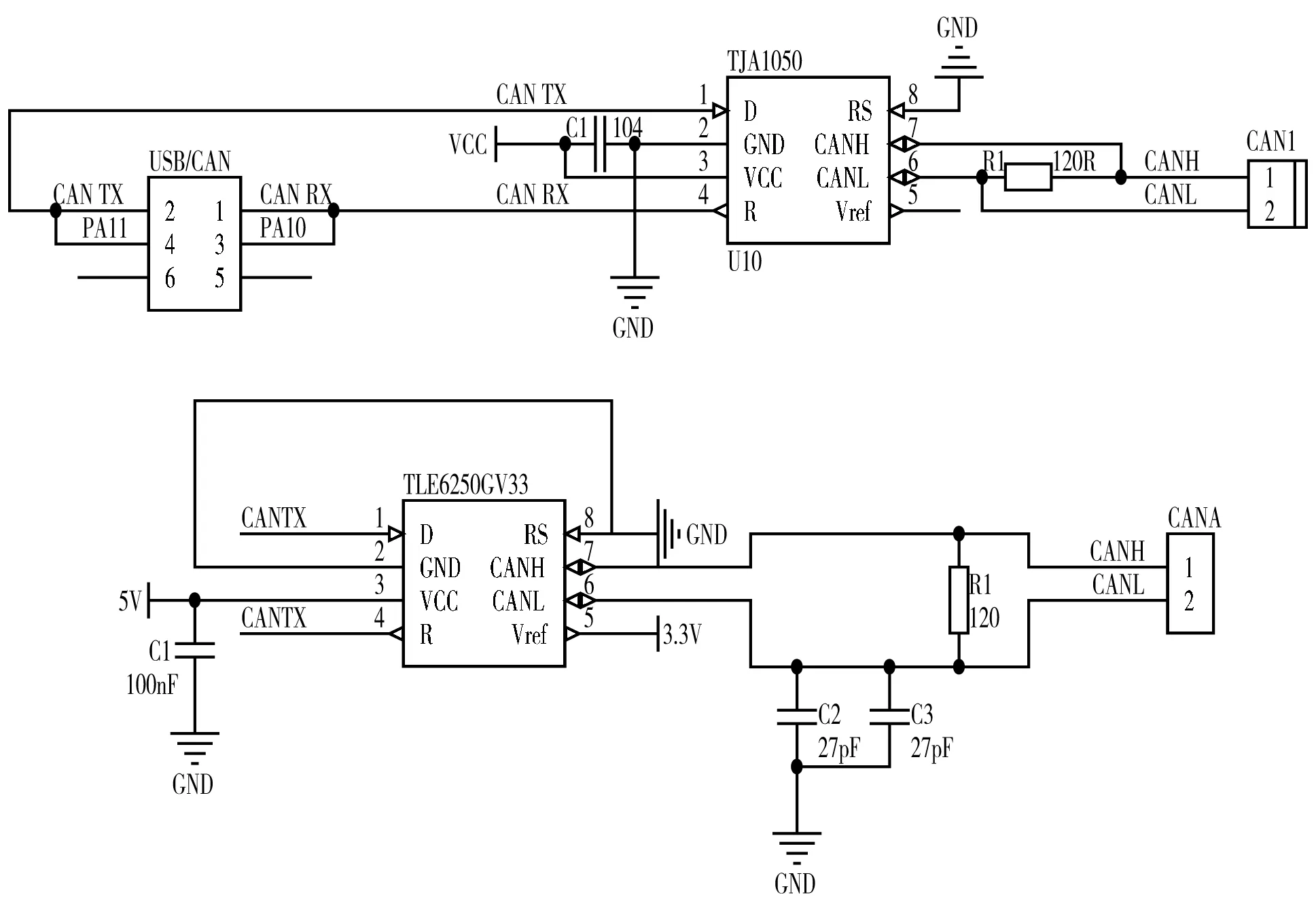
图2 主从控制器CAN外扩收发器原理图
CAN总线硬件节点由STM32F407和TMS320F28335组成。它们带有独立的CAN外扩收发器,通过CAN通信端口连接到CAN总线。CAN外扩收发器是CAN控制器与物理总线之间的接口,能够实现TTL电平与CAN差分信号之间的转换,还能有效降低CAN通信接口的电磁干扰。其内置一个电流限制电路,当电源供电发生短路时能保护电路。此外还包含一个热保护电路,当连接点的温度过高时会切断连接[14]。外扩收发器TJA1050和TLE6250GV33的硬件原理如图2所示。相关引脚说明见表1。
表1 CAN收发器引脚说明

引脚说明D数据发送引脚GND接地引脚VCC供电电源R数据接收引脚Vref参考电压输入CANLCAN低电平总线CANHCAN高电平总线RS模式切换
2.3 传感器模块
选择北微传感的BW-AH200高精度九轴航姿参考系统作为角度传感器,它采用高质量的MEMS加速度计、陀螺仪和磁力计,严格的密封设计保证在恶劣环境下仍可以准确测量载体的姿态信息[15-17]。姿态角分辨率达0.01°,误差精度在1°以内。
2.4 驱动模块
H桥是常用的直流电机驱动电路,通过开关管通断控制电推杆内部直流无刷电机的转动方向。为了实现平地铲的高精度整平,本文使用PWM波作为驱动信号控制电机的转速。H桥驱动电路原理如图3所示。
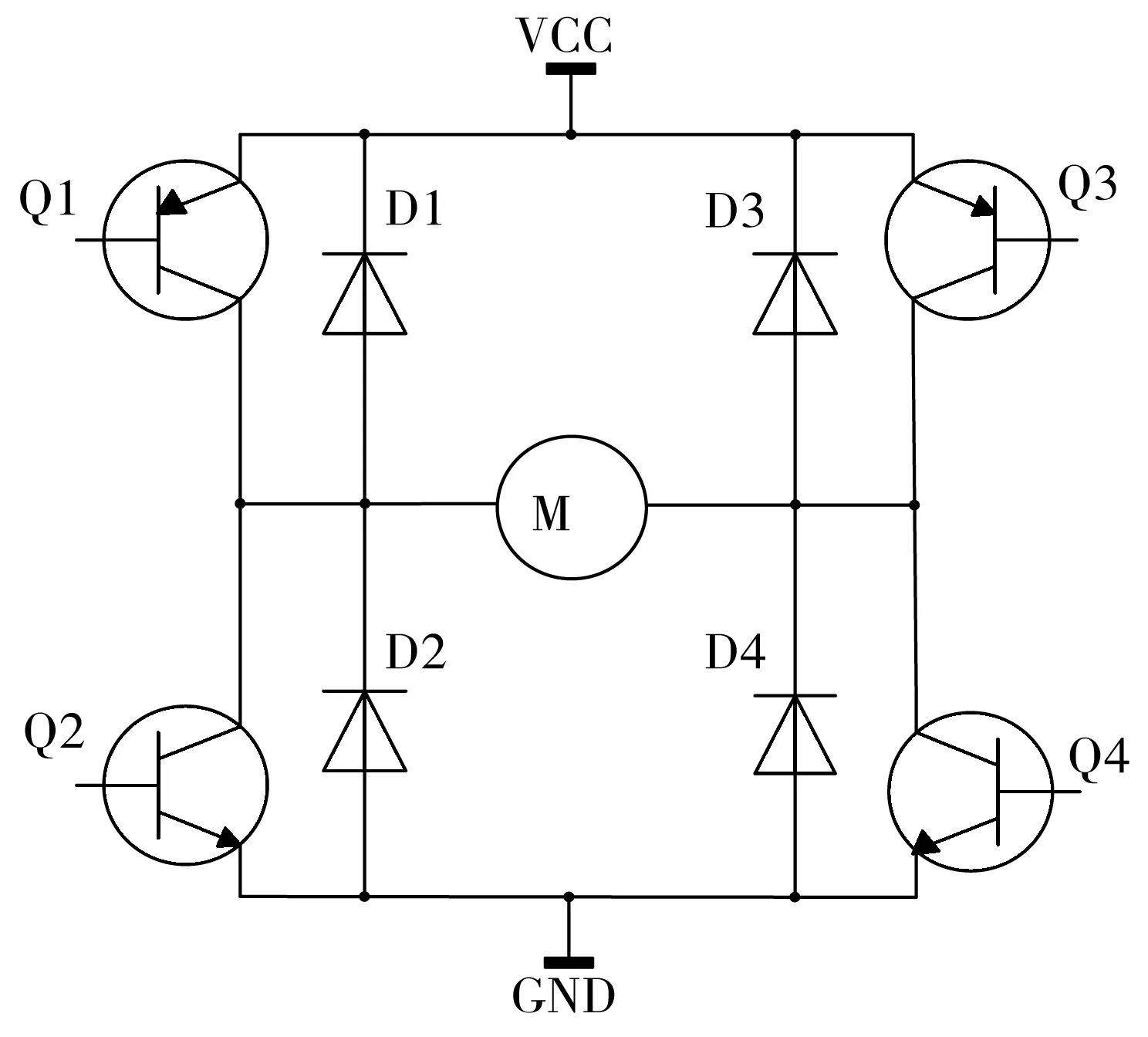
图3 H桥驱动电路
H桥驱动电路主要由4个开关管Q1、Q2、Q3、Q4和1个直流电机M组成。根据不同对角线上2个开关管的导通情况,电流能够双向通过直流电机,从而实现电机转向的切换。开关管的导通和关断时长由PWM波的占空比决定,通过调节占空比可以控制电机的转速。为防止电机转向切换时过大反向电动势损坏开关管的情况,采用4个反并联二极管进行保护。
3 通信系统软件设计
本系统使用CAN2.0B协议,波特率配置为500 kbit/s,数据帧设置为扩展数据帧,字节长度为8 Byte。利用MDK5和CCS5.5作为通信单元的开发环境。CAN通信的发送接收流程如图4、图5所示。
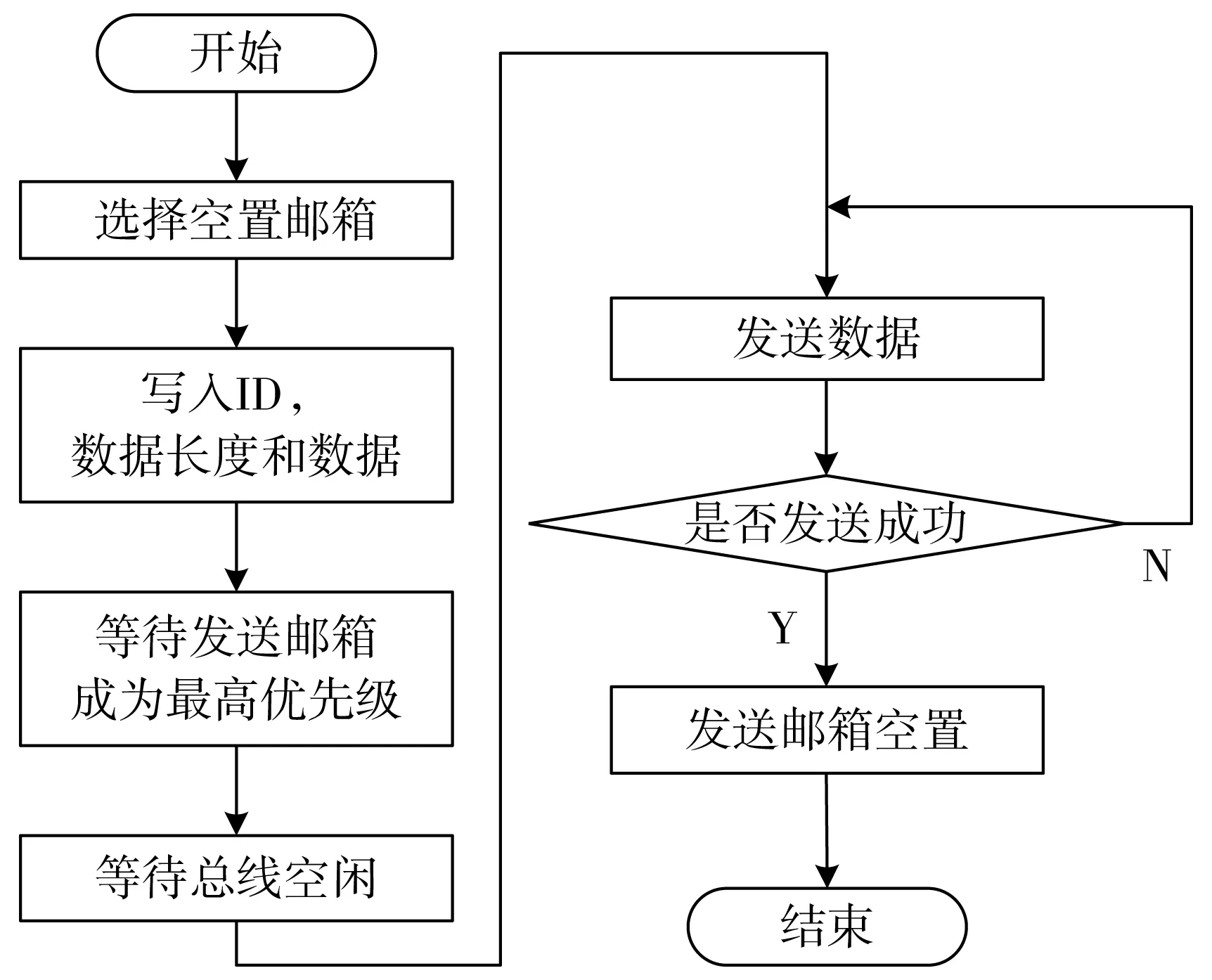
图4 CAN通信发送流程
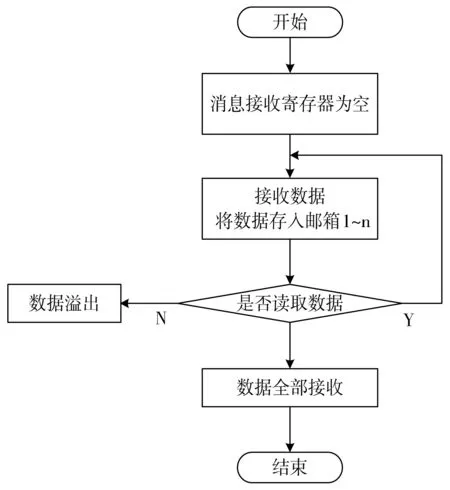
图5 CAN通信接收流程
发送数据时,首先选择一个空置邮箱,写入匹配ID和需要发送的数据格式和内容[18]。在总线仲裁结束后发送数据。如果在数据发送过程中CAN总线出现通信错误,发送邮箱会强制结束此次发送并等待下一次通信,直至成功为止。
当寄存器接收数据时会依次选择空置邮箱存储数据,控制器直接从接收邮箱中读取数据。当数据溢出时,若消息接收寄存器锁定,新数据将丢失;反之,新数据将覆盖之前的数据。
4 实验结果分析
4.1 通信实验
主、从控制器通信系统如图6所示,利用逻辑分析仪LAB7504对实验数据进行解码验证。LAB7504为致远电子生产的高性能逻辑分析仪,其存储数据容量可达2 GB,定时采样率最高可达5 GHz,支持触发输入。上位机软件ZLGLogicV5的参数设置如下。“总线设置”中设置波特率为500 kbit/s,“采样点”默认为75%,“触发设置”中触发模式为扩展数据帧,字节长度为8 Byte,基础触发设置为“立即触发”。数据通信过程中,上位机软件ZLGLogicV5会显示通信解码后的数据,具体显示界面如图7所示。
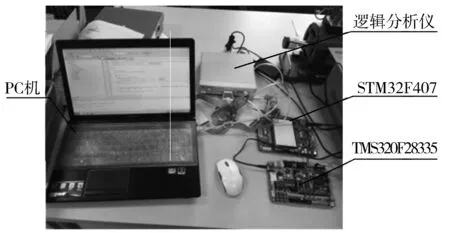
图6 逻辑分析仪解码实验

图7 基于逻辑分析仪的CAN解码
图7显示了CANL和CANH之间的电压波形,由视图区可以得知此次接收的数据扩展帧ID为0x15555555,字节长度为8位,解码后的数据为0x01、0x02、0x03、0x04、0x05、0x06、0x07、0x08。显示的解码数据与实际发送的数据帧一致。
4.2 控制实验
本文设计了一套混凝土激光整平机水平控制系统实验平台。采用模拟路况和高程调节这2个电动推杆来模拟整平机在实际工作状态下平地铲的前后,左右水平倾角变化。实验平台如图8所示,图中1为前后水平调节电动推杆,2为模拟路况电动推杆,3为左右水平调节电动推杆(2个),4为高程调节电动推杆,5为24 V直流稳压电源。
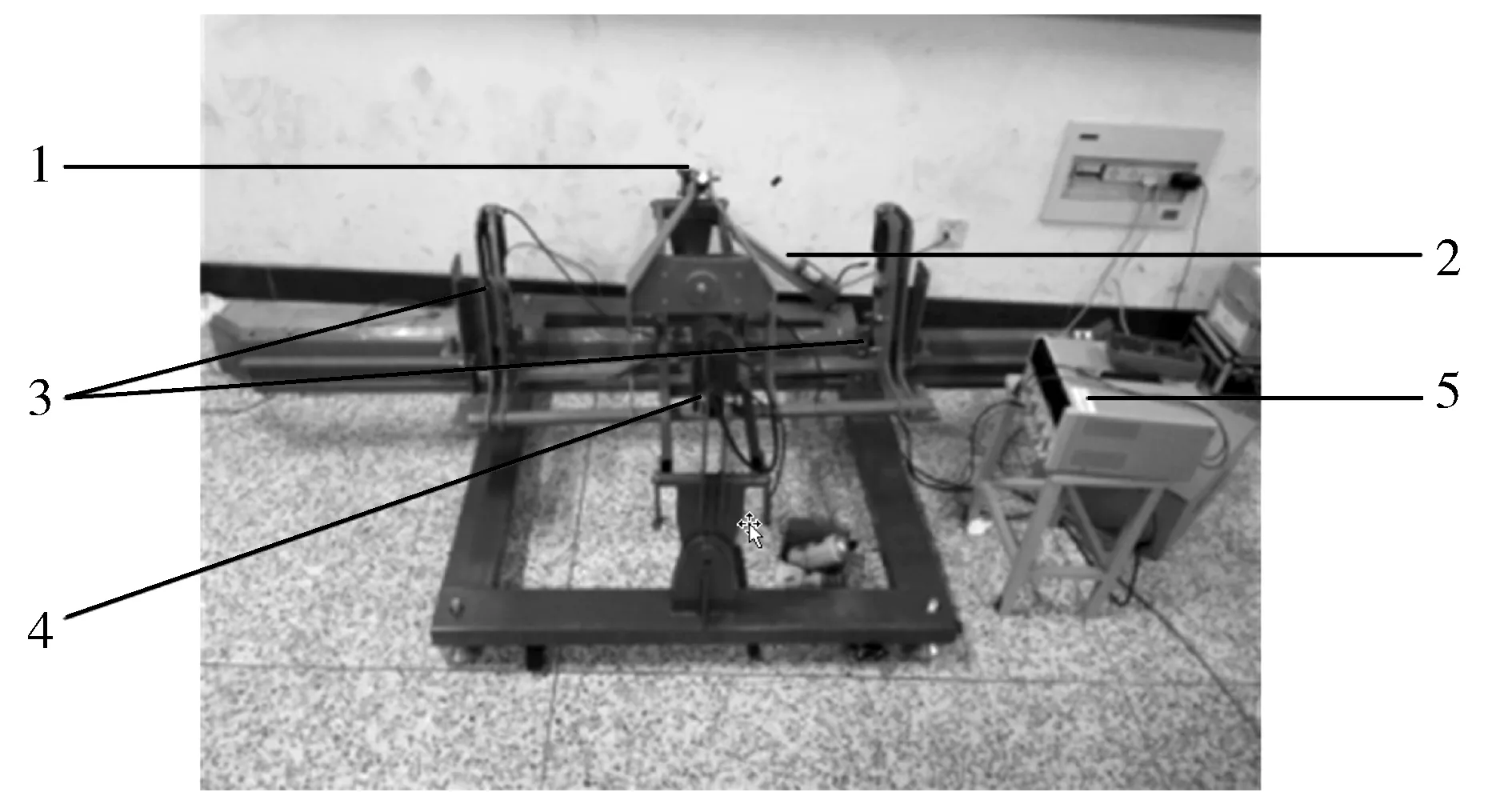
图8 混凝土激光整平机水平控制系统实验平台
STM32负责发送启动或停止指令,DSP负责实现具体的姿态控制算法。阶跃扰动下的刮板动态响应曲线如图9所示,采用开关控制方法实现。由图9可知DSP可以正确接收启停指令并对刮平板进行调平控制,控制精度可达0.2°。
5 结束语
本文设计了基于CAN通信的激光整平机控制系统,实现了控制器之间的指令传达并通过逻辑分析仪验证了传输的可靠性。从控制器能够根据主控制器的传送指令完成刮平板的调平,为激光整平机的姿态控制提供了一种可行方案。
本研究仍存在以下不足,控制方式只采用简单的开关控制,无法实现刮平板高精度和快响应的控制效果。在今后的研究中,将设计更适合整平机控制系统的控制算法。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
珠江水运(2020年11期)2020-06-25
网络安全和信息化(2019年5期)2019-12-23
测绘通报(2018年10期)2018-11-02
中国港湾建设(2017年11期)2017-12-19
现代电子技术(2017年14期)2017-07-25
中国核电(2017年1期)2017-05-17
铁路技术创新(2013年3期)2013-12-31
制造业自动化(2011年10期)2011-01-19
