
基于参量Lyapunov理论的广域时滞阻尼控制器设计
2018-08-20 07:31丁贵立陈汝斯潘明森徐遐龄
电力自动化设备 2018年8期
丁贵立,林 涛,陈汝斯,潘明森,徐遐龄
(1. 武汉大学 电气工程学院,湖北 武汉 430072;2. 华中电力调控分中心,湖北 武汉 430077)
0 引言
国家电网“十三五”规划中指出,提高大规模互联电网安全稳定控制保障能力是未来研究的重点方向之一。随着大区域电网互联及跨区送电规模扩大,区间阻尼随跨区联络线和区域电网内部主要断面输送潮流的增加而恶化,电网发生区间低频振荡的风险正逐步加大,成为互联电网安全稳定运行的巨大威胁。例如南方互联系统“4·26”振荡事故[1]导致系统解列,南方电网“5·13”功率振荡[2]事故,2006年7月1日河南电网多条500 kV和220 kV线路跳闸后,华中电网发生大范围低频功率振荡,最终导致华中电网和华北电网、华中电网主网与川渝电网解列[3]。严重的低频振荡现象甚至会以一种等幅的并不衰减的形式出现,这种低频振荡严重影响了区间功率的传送效率和互联系统的稳定性,并且可能引起系统解列甚至崩溃。例如在北美和加拿大系统都出现过不同寻常的振荡过程[4],在我国河北南网的安保线也多次发生等幅的低频振荡,安装电力系统稳定器(PSS)后振荡依然时有发生[5]。因此,提高系统阻尼成为提升互联系统稳定性和坚强性的主要方法之一,特别应该重视严重威胁互联电力系统安全稳定运行的等幅低频振荡模式。
随着广域测量系统(WAMS)的发展,使用远方反馈信号可以有效地阻尼区间低频振荡,但由此带来的远方反馈信号传输时延成为影响控制器效果甚至系统稳定的主要原因,也是大规模电网动态安全稳定分析和控制不可避免的一个关键问题,故设计考虑信号传输时延的广域阻尼控制器愈发迫切。针对时滞问题,目前主要有两大类处理方法。一类可归纳为对广域反馈信号或时滞的直接补偿。文献[6]通过设计一个时延预估器来补偿时滞。文献[7]对网络化环境下的自动发电控制(AGC)系统的延迟进行了分析,提出了基于时滞系统控制理论的AGC H∞控制方法。产生于20世纪50年代的Smith预测方法是最早的处理控制器设计中时延问题的方法[8],典型的Smith预估补偿是根据延迟引入系统开环的反馈环节[9]。文献[10]对Smith预测方法进行了改进,可以显著改善时滞系统的控制性能。文献[11]将Pade近似方法引入广域时滞系统的分析与控制,其是处理广域阻尼控制器设计中时滞问题的一种有效方法。文献[12]应用Pade近似将时滞项转化为有理多项式,并在此基础上进行鲁棒控制器设计,取得了良好的效果。事实上,Smith预估方法和Pade近似方法在一定程度上是等效的,都是将含时滞系统的控制器设计问题转化为不显含时滞系统的控制器设计问题,进而完成控制器的设计。基于时滞预测补偿原理的控制器,由于其参数选择通常需要反复离线仿真来调试或者通过经验来选取,并没有一个具体的可操作的标准方法。这不仅增加了控制器设计的时间,而且也阻碍了其在大系统中实际应用的可能。并且Smith预估方法和Pade近似方法都是针对固定时滞的处理方法,对实际广域时滞阻尼控制系统中的较大范围的时滞变化的适应性有待提高。
为保证系统在一定时滞范围内的稳定性,提出另一类考虑时滞的广域阻尼鲁棒控制器设计思路。如使用非线性bang-bang控制方法[13],将时滞作为系统不确定性处理的鲁棒控制方法[14],应用自由权矩阵设计广域阻尼控制器(WADC)[15-16],使用超前滞后相位补偿方法设计广域时滞阻尼控制器[17],文献[18]则提出了被广泛使用的基于线性矩阵不等式(LMI)的广域阻尼控制器设计方法。自由权矩阵设计方法本质上也是一种基于LMI的设计方法。线性矩阵不等式方法是一个典型的充分条件,不可避免地存在较大的保守性和复杂性,将其应用于大规模电力系统控制中还需要更深入的研究。以上2类方法虽然对处理时滞有效果,但是这些方法在应用之前大都需要对系统进行近似降阶,这就降低了模型的精确性,影响控制器的设计效果。
近年来,在电网可观性的工程实践方面,通过全球定位系统(GPS)可以准确地获得相量测量单元(PMU)和控制中心的时间数据。t1时刻相量数据集中器收集和同步广域测量信号,控制器通过测得的广域信号发出广域阻尼控制信号,当安装在发电机励磁侧的控制器在t2时刻收到控制信号时,GPS提供的高分辨率的时间服务可以获得时间延迟的准确数据[19],为广域时变时滞阻尼控制器的设计提供基础。在系统稳定控制理论方面,代数Lyapunov方程和代数Riccati方程分别是系统分析和设计的两大方法,而参量Lyapunov理论[20-21]结合了以上2种方法的所有优点,该理论在其他的一些工程领域已经得到了成功的应用,例如文献[20-21]应用该理论系统地给出了航天器交会系统的控制器设计方法,为相关工程实践提供了一定的理论保证和可供借鉴的设计思想。
本文基于参量Lyapunov理论设计了广域时滞阻尼控制器。一方面,该方法通过对实测时滞进行动态补偿的原理设计控制器,克服了一般时滞补偿控制器主要针对固定时滞的缺陷。这是由于一般时滞补偿控制器设计方法不能给出显含时滞的控制律,设计思路是将含时滞系统的控制器设计问题转化为不显含时滞系统的控制器设计问题,进而完成控制器的设计。而本文提出的控制器设计方法能给出显含时滞的控制器表达式,从理论上保证了所提方法对时变时滞动态补偿的可行性。同时,该方法还可以直接给出精确的控制器参数取值,克服了一般时滞补偿控制器参数整定无公式化算法的问题。另一方面,该方法只需要对原系统精确模型状态矩阵进行Jordan标准化处理,不需要系统降阶,提高了控制精确性;所给控制器参数是闭环系统渐进稳定的充要条件,降低了控制器设计的保守性,使闭环系统具有更好的动态响应性能。
1 参量Lyapunov理论简介
系统在运行点线性化后的状态方程为:
(1)
其中,A∈Rn×n;B∈Rn×m;x(t)∈Rn;u(t)∈Rm;y(t)∈Rp。所谓二次最优控制问题是指对于任意给定的矩阵Q=STS≥0,R>0且(A,S)可检测,寻求反馈u=F(x)使得如下二次指标函数最小化,即是最优控制问题。

(2)
极小化的最优反馈可表示为:
u*(t)=-R-1BTPx(t)
(3)
P>0是下述代数Riccati方程的唯一对称正定解。
ATP+PA-PBBTP=-Q
(4)
式(3)给出的最优控制器具有一个非常重要的特征,就是由其构成的闭环系统具有无穷大的幅值裕度和至少60°的相角裕度[22],从而具有很好的鲁棒性。正因为如此,最优控制理论在工程上得到了非常广泛的应用。从最优控制理论可知,只要Q和R确定,那么反馈控制器就唯一确定。对于R的选择原则已经较为明确,但是对于Q的选择则并无规则可循,将二次最优控制理论应用到实际工程中,设计者通常要通过反复试猜或迭代才能选择到满意的Q。
为了解决这个问题,提出了参量Riccati方程。假设Riccati方程式(4)有一个对称正定解P>0,那么对于任意γ>0,取:
Q=γP
(5)
即可保证Q的正定性。由此,Riccati方程式(4)可表示为:
ATP+PA-PBBTP=-γP
(6)
定理1 考虑连续系统式(1),其中(A,B)可控。假设Riccati方程式(6)有一个对称正定解P=P(γ)>0,其中γ>0,那么:
u*(t)=-R-1BTPx(t)
(7)
如式(7)所示的控制器为正定线性系统,并且u*(t)为如式(8)所示的最优控制问题的解,u*(t)极小化如式(9)所示的二次指标函数。
(8)
(9)

定理2 设(A,B)可控,则下述命题成立。
当且仅当
(11)
成立时,参量Riccati方程式(6)具有唯一的对称正定解。
此外,若满足上述条件,该唯一的解可以表示为P(γ)=W-1(γ),其中W(γ)为式(12)所示的参量Lyapunov方程的唯一对称正定解。
(12)
参量Lyapunov理论的详细介绍及推导证明过程可详见文献[20-21,23]。
2 基于参量Lyapunov理论的广域时滞阻尼控制器设计的理论基础及特点分析
2.1 基于参量Lyapunov理论的广域时滞阻尼控制器设计的理论基础
考虑时滞的状态方程为:
(13)
其中,τ为控制器输入反馈信号的延时且τ>0;n,τ=([-τ,0],Rn)表示从区间[-τ,0]到Rn函数映射的Banach空间,则若存在xt∈n,τ就表示将x(t)从区间[t-τ,t]映射到[-τ,0],即xt(θ)=x(t+θ),θ∈[-τ,0]。
根据以上状态方程,矩阵对(A,B)可以通过Jordan标准型变换成以下形式:
(14)
其中,Aj、Bj分别为原系统方程状态矩阵A和输入矩阵B进行Jordan标准型变换后得到的状态矩阵和输入矩阵;A-为包含Aj中负实部的所有特征值的矩阵且A-∈Rn-×n-;Ao为包含Aj中所有位于虚轴上的特征值的矩阵且Ao∈Rno×no。
基于第1节介绍的参量Lyapunov理论,得出控制器的控制律如下:
(15)
其中,L∈Rp×n使得Aj-LCj渐进稳定;Po(γ)为如式(16)所示的代数Riccati方程的唯一正定解。
(16)
将式(16)变换成如下形式:
(17)
Po(γ)=W-1(γ)
(18)
控制器参数取值为:

(19)

(20)

I≥γR+2noγeωoγτe-(Aj-LCj)TτWo(γ)e-(Aj-LCj)τ
(21)
(22)

2.2 与基于LMI方法的自由权矩阵控制器设计方法的理论比较
基于LMI方法的自由权矩阵控制器如式(23)所示。
u(t-τ)=Kx(t-τ)
(23)
这类方法的设计目标是确定状态反馈增益矩阵K,使得闭环系统在稳定的前提下,能够容忍足够大的时滞。
基于参量Lyapunov广域时滞阻尼控制器如式(15)所示,其具有如下的特点。

b. 将含时滞的闭环系统稳定问题转化为基于LMI方法的可解性问题,这类广域时滞阻尼控制器设计方法(包括自由权矩阵)所求得的控制律一般有较大的保守性,其是由LMI理论的本质特性决定的;而基于参量Lyapunov理论设计的广域时滞阻尼控制器参数(具体参数及取值参考式(19)—(22)),是从系统稳定的本质定义出发而确定的(即系统初始能量一定时,能量函数一阶导数为负,则此系统稳定的),理论上降低了控制器设计的保守性,避免了出现实际系统可控而LMI方法不可解的问题。
c. 基于LMI方法的自由权矩阵控制器反馈增益矩阵K,需要通过对高维矩阵不等式方程循环迭代求解[15]或者对原系统进行等值和近似降阶,而基于参量Lyapunov理论可以直接根据原系统矩阵变换方程显式的给出控制器控制律解析解(式(15))及参数取值(式(19)—(22)),便于进一步的分析和综合。
基于参量Lyapunov理论设计的广域时滞阻尼控制器的控制律参数是一个标量,方便设计,降低了控制器设计的复杂性,还可以避免由于控制律的过度参数化引起的复杂计算,这对于需要控制器快速反应的特殊系统而言是具有优势的。
3 控制器总体结构、输入输出信号选择和设计流程
文献[17]论述了分别考虑上下行时滞和统一考虑时滞对控制器设计方法和效果并无影响,因此一般都将上下行时滞看成一个整体时滞来处理。
3.1 控制器总体结构
本文设计的参量Lyapunov广域时滞阻尼控制器总体结构如图1所示。由图1可以看出,参数Lyapunov 控制器(PLC)是通过给PSS装置提供附加阻尼控制信号来阻尼区间振荡模式的,采样测量时间、控制器计算时间、传输时间等被简化为单一时滞,在图1中用e-sd表示。
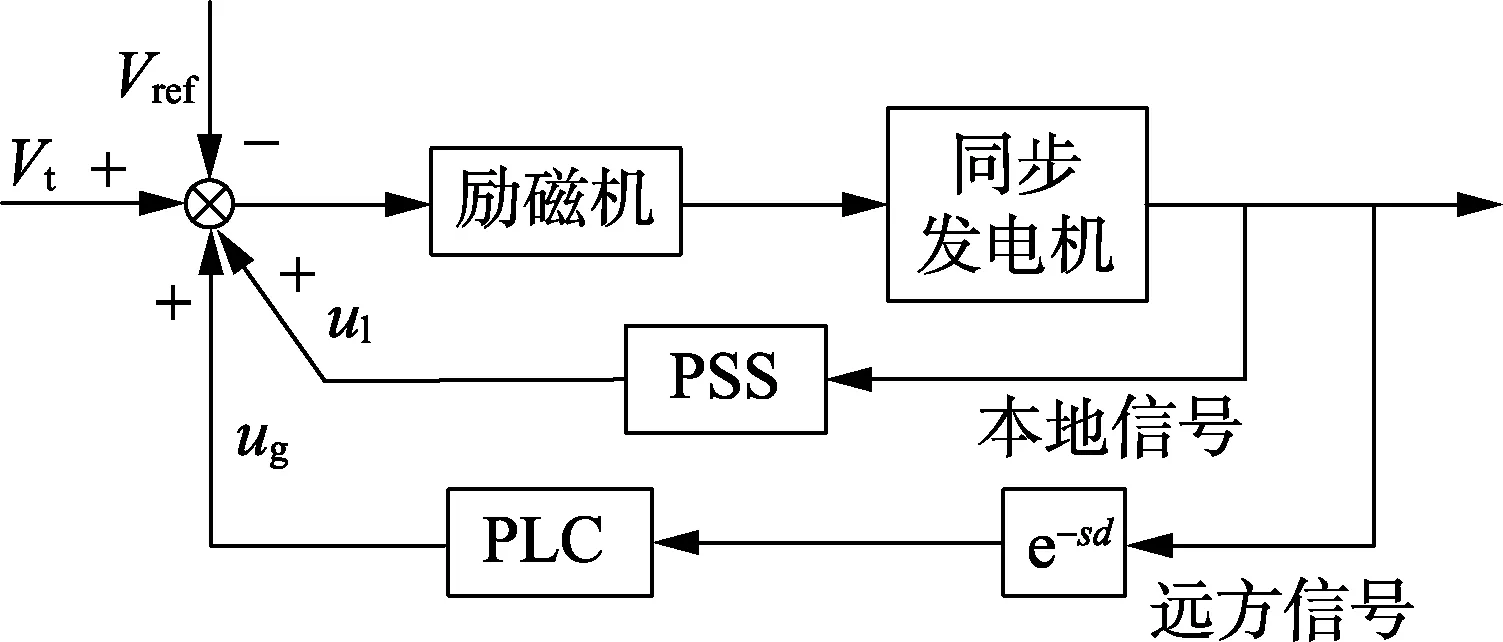
图1 基于参量Lyapunov理论的广域时滞阻尼控制器总体结构Fig.1 Overall structure of wide-area time-delay damping controller based on parametric Lyapunov theory
3.2 控制器输入输出信号选择
对线性系统应用模态分析法分析系统的低频振荡模式,可以得到系统的关键区间振荡模式。如留数方法[24]及几何测量方法[25-26]的模态可观性分析可以用来选择广域阻尼控制器的反馈信号。由于几何测量方法是针对某一特定的模式给出,其能够更好地控制这一振荡模式的相对可控/可观性最高的一个反馈信号。因此,本文采用文献[25]中的几何测量方法选择WADC的反馈信号。附加控制信号应该输入具有最大的留数λijk的地点[27]。
3.3 控制器设计步骤
基于参量Lyapunov方法的广域时滞阻尼控制器设计步骤如下。
a. 建立所要研究的电力系统的详细模型,在系统稳定运行点获得不包含控制器的系统线性化模型。
b. 使用模态分析方法获得系统频率和阻尼比的关系,找出关键的区间振荡模式。
c. 使用几何可控可观方法确定对关键模式可观性最好的反馈信号,使用留数法确定控制器输出信号的地点。
d. 矩阵对(A,B)通过Jordan标准型变换成以下形式:
e. 根据式(15)获得控制律,参数取值由式(19)—(22)确定。
f. 在原始详细模型上验证所设计的控制器的有效性。
4 仿真验证
为了验证所提方法的有效性,在如图2所示的4机2区系统上验证本文所提的控制策略,系统参数见文献[28],并将仿真结果与目前应用比较广泛的基于LMI方法的自由权矩阵控制器进行比较。

图2 4机2区系统Fig.2 Four-generator two-area system
4.1 模态分析、反馈信号和控制信号输入点的选择
模态分析结果见表1。可以看到,模式1为关键区间振荡模式,广域时滞阻尼控制器的设计目的就是要抑制这种振荡模式。
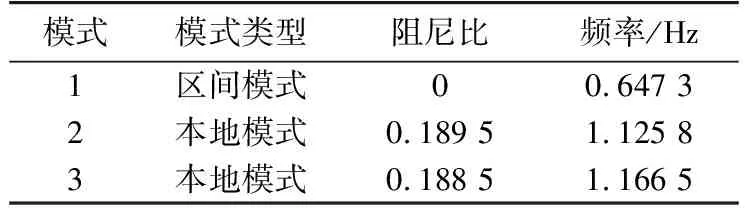
表1 4机2区系统模态分析结果Table 1 Modal analysis results of four-generator two-area system
关于模式1的几何可观度指标见表2,为了简洁,将几何可观度指标标准化,即将其中最大的指标作归一化处理。由表2可知,发电机G1、G3转子角偏差具有最大的几何可观性,因此将发电机G1、G3转子角偏差作为广域时滞阻尼控制器的反馈信号;发电机G3可控性最好,因此控制器的输出信号输入发电机G3的励磁系统。
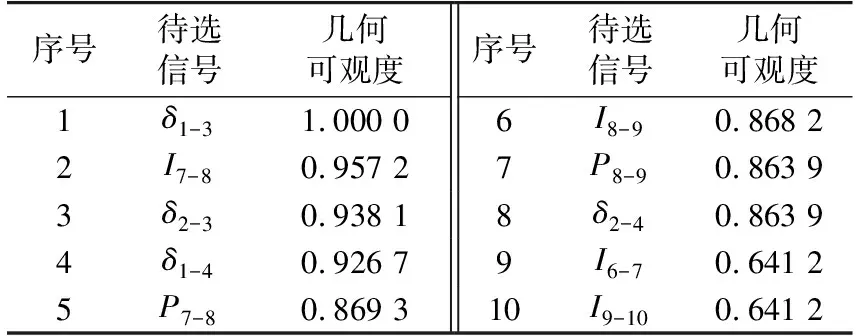
表2 模式1的几何可观度指标Table 2 Geometric observability index of Mode 1
4.2 基于参量Lyapunov理论的广域时滞阻尼控制器的设计结果

将Po(γ)的表达式代入式(15)即可得出控制器的控制律。
将不同时滞τ代入式(19)—(22)确定控制器参数取值,得出对应的γ取值如表3所示。

表3 不同时滞时对应参数取值Table 3 Parameter range of γ corresponding to different values of time delay τ
4.3 仿真验证
扰动为机组G1励磁电压在1 s时阶跃5%,0.2 s后恢复为额定值。
4.3.1 固定时滞下所设计控制器效果验证
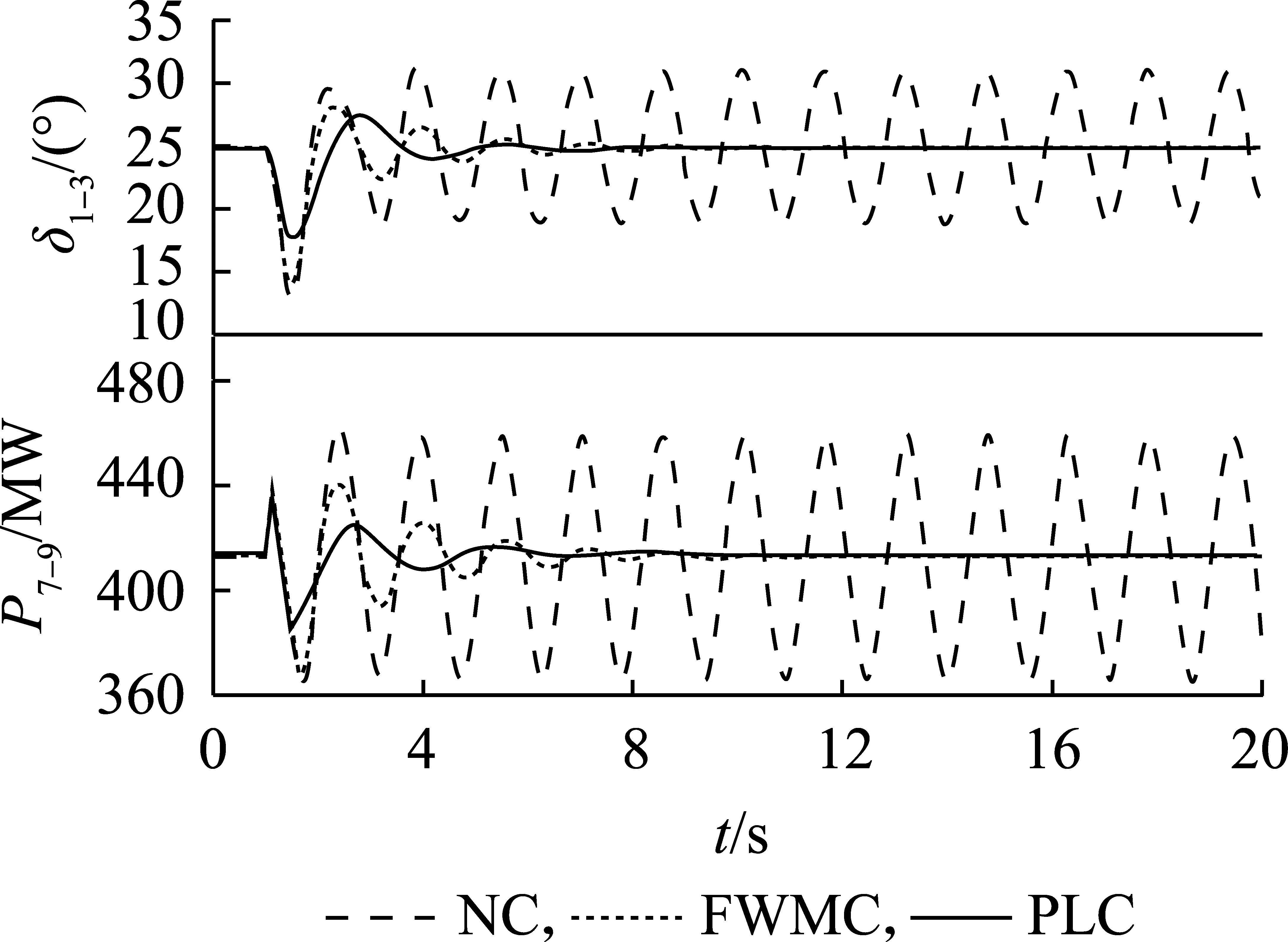
图3 无延时下仿真波形Fig.3 Simulative waveforms without time-delay
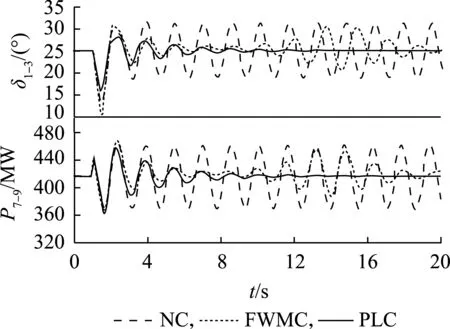
图5 400 ms延时下仿真波形Fig.5 Simulative waveforms with 400 ms time-delay
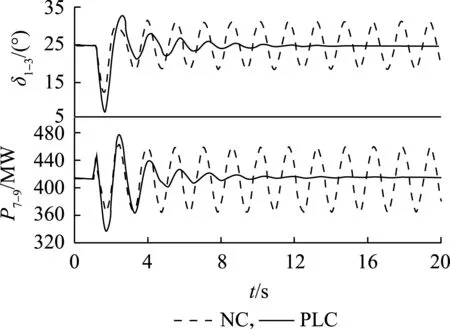
图6 500 ms延时下仿真波形Fig.6 Simulative waveforms with 500 ms time-delay
图3—5分别为固定0、200 ms、400 ms时滞下机组G1与G3功角差δ1-3、联络线7-9传输功率P7-9响应时域仿真图。图6为500 ms时滞下参量Lyapunov控制器作用下的机组G1与G3转速差、联络线7-9传输功率响应时域仿真图。图中NC表示无控制器,FWMC表示根据文献[15]的方法设计的自由权矩阵控制器,PLC表示基于参量Lyapunov理论设计的控制器。由图3可知,系统无时滞时参量Lyapunov控制器和自由权矩阵控制器都能有效阻尼振荡,参量Lyapunov控制器的控制效果和动态性能都要更加优越。由图4可知,200 ms延时下参量Lyapunov控制器和自由权矩阵控制器都能有效阻尼振荡,参量Lyapunov控制器的控制效果和动态性能依然要优越于自由权矩阵控制器。由图5可知,延时达到400 ms时,自由权矩阵控制器已经不能很好地抑制这种区间低频振荡模式,这是因为超过了根据文献[15]中的自由权矩阵方法设计的控制器的容忍时滞380.2 ms,而参量Lyapunov控制器则依然可以有效地抑制振荡。由图6可知,当延时达到500 ms时,参量Lyapunov控制器仍然能够有效地抑制区间振荡,表明该控制器可以在保证系统稳定的前提下提供更大的容忍时滞,而系统时滞一般可以控制在500 ms内[29]。即使时滞超过500 ms,也可以通过更新时滞取值,重新计算控制器参数,然后回代控制律表达式,设计出满足时滞要求的参量Lyapunov控制器,这也是参量Lyapunov控制器的显著优点之一[19]。
4.3.2 时变时滞下所设计控制器效果验证
图7为验证时变时滞下控制器性能的仿真波形,图中PLC表示根据固定时滞(300 ms)设计的参量Lyapunov控制器,FWMC表示自由权矩阵控制器,SC表示基于参量Lyapunov理论设计的分时切换固定时滞控制器(以每隔2 s时间段内最长时延作为时延参数,基于参量Lyapunov理论设计广域时滞阻尼控制器),RTC表示根据实时时滞基于参量Lyapunov理论设计的广域时变时滞阻尼控制器。

① PLC,② FWMC,③ SC,④ RTC图7 时变时滞下仿真波形Fig.7 Simulative waveforms with changing time-delays
由图7可知,在处理时变时滞时,相比于固定时滞参数下设计的参量Lyapunov控制器、自由权矩阵控制器、分时段固定时滞参量Lyapunov控制器,基于参量Lyapunov理论的广域时变时滞阻尼控制器能够更快地平息区间传输功率振荡,控制器的动态性能也要更加优越。另外,在同样使用基于参量Lyapunov理论设计广域阻尼控制器时,分别采用固定时滞、分时切换固定时滞、实时时变时滞为时滞参数的3种参量下Lyapunov控制器效果及动态性能依次提升,说明在一般实际系统具有实时时变时滞情况下,控制器采用实时时变时滞参数设计的必要性,这也是本文基于参量Lyapunov理论设计广域时滞阻尼控制器的初衷。
5 结论
本文提出了一种基于参量Lyapunov理论的广域时滞阻尼控制器设计策略,在4机2区系统模型上验证了所提控制方法的有效性,并通过与基于LMI方法设计控制器的效果对比,得出以下结论。
a. 相比基于LMI方法的自由权矩阵阻尼控制器,所提出的控制器设计简洁,不需要对原系统进行等值和降阶,也不需要将控制器设计问题转换为复杂的LMI数学表达式,有效降低了控制器设计的复杂性和保守性。并且能给出与时滞参数显式相关的控制律及参数取值,使得控制器对固定时滞和时变时滞系统都有良好的控制效果。
b. 相比基于LMI方法的自由权矩阵阻尼控制器,所提的控制器设计策略能够提供更大的允许时延,在同样的固定时滞条件下,所提的控制器动态响应性能更优越,稳定闭环系统所需的时间更短。
c. 相比基于LMI方法的自由权矩阵阻尼控制器,在时变时滞条件下,以时变时滞为参数设计的参量Lyapunov广域时滞阻尼控制器效果和动态性能依然优越于自由权矩阵控制器。
附录见本刊网络版(http:∥www.epae.cn)。
猜你喜欢
中国交通信息化(2018年12期)2018-03-21
法制与经济·上旬刊(2017年5期)2017-09-16
昭通学院学报(2017年5期)2017-04-13
江汉论坛(2016年11期)2017-02-23
法哲学与法社会学论丛(2015年0期)2015-05-16
电测与仪表(2015年2期)2015-04-09
物理实验(2015年9期)2015-02-28
数学年刊A辑(中文版)(2014年4期)2014-10-30
航天返回与遥感(2014年1期)2014-07-31
声学技术(2014年2期)2014-06-21
