
基于参数修正的输电线路双端不同步测距方法
2018-08-20 07:31王丰华刘亚东
电力自动化设备 2018年8期
王丰华,穆 卡,2,张 君,刘亚东,钱 勇
(1. 上海交通大学 电力传输与功率变换控制教育部重点实验室,上海 200240;2. 国网冀北电力有限公司 电力科学研究院,北京 100045)
0 引言
高压输电线路是电力系统的重要组成部分,承担着输送电能的重任,若发生故障会严重影响电力系统的稳定性与可靠性。其中,包括单相接地、两相短路、两相接地故障等在内的高压输电线路非对称故障约占线路故障的95%以上[1]。因此,有必要研究准确的非对称故障定位方法,以采取有效措施排除故障,恢复供电,减少停电时间,增强系统稳定性。
现有故障测距方法有行波法与故障分析法两大类[2]。其中,行波法利用故障产生的行波,通过检测行波从故障点到测量点的传播用时进行测距,具有原理简单、不受故障类型和过渡电阻影响、理论测距精度高的优点[3]。但在工程应用中发现,该方法存在投资成本高、过度依赖波头检测准确度、难以确定实际波速等缺陷,可靠性差[4]。故障分析法依据线路电压、电流的测量值,通过分析故障后电路构造相应的测距方程来实现故障测距,通常分为单端故障分析法[5]和双端故障分析法[6]。其中双端故障分析法具有不受故障过渡电阻和系统阻抗变化影响的特点,应用前景良好[7-8]。但是,线路双端数据的不同步会给双端故障分析法的测距结果带来较大误差。为消除该影响,国内外学者进行了若干研究:文献[9]基于线路首末两端的电压、电流计算得到的故障点电压幅值相等这一原理建立了故障测距方程,应用遗传算法对其进行求解并剔除了伪根,但当线路经高阻短路时,故障点电压可能不是最小值,从而导致测距失败;文献[10]通过分析故障等值正序网和负序网建立了以不同步角为未知量的方程,求解得到不同步角,实现了线路双端不同步测距;文献[11]利用各次谐波分量建立了测距方程组,采用牛顿迭代和非线性最小二乘拟合相结合的方法确定了线路故障位置。对于实际线路而言,受制于地质、气候等因素的影响,线路参数特性、长度等不可避免地会发生变化,也会给测距结果带来误差。文献[12]考虑了线路参数变化的影响,将故障距离、数据不同步角和线路参数同时作为未知量,采用集中参数模型建立了方程组,进而基于信赖域方法对其求解得到故障距离。但该方法待求量多,但对长线路而言,由于分布电容的存在,其测距误差比较大。文献[13]则采用分布参数模型提出了基于线路参数估计的双端不同步测距算法,利用故障前后的数据共同建立测距方程组,但其所需数据量大,无法保证线路参数和线路不同步角在故障前后的一致性,测距可靠性低。因此,如何在双端数据不同步的情况下消除线路参数不确定性的影响,仅应用故障数据实现精确的线路故障测距仍是一个亟待解决的难题。
基于此,本文基于分布参数模型提出一种双端不同步测距新方法。即利用故障后的双端电压、电流,建立考虑线路参数并消除双端不同步时间差的故障测距方程组,进而采用仿电磁学ELM(Electromagnetic-Like Mechanism)算法对其求解,以期实现双端不同步、参数自适应、精确可靠的故障测距。最后基于仿真分析与实际故障数据对所提方法进行了验证。
1 故障测距方程组的建立
1.1 线路参数修正
输电线路穿越的地形复杂,受沿线地质、气候等因素影响,线路的参数与线路的长度会发生改变而偏离其初始值,同时电压互感器、电流互感器(特别是电流互感器)也会存在一定的测量误差。
文献[14]提出将上述因素所引起的故障测距误差进行非线性映射,即将线路参数和线路长度的误差以及电压互感器、电流互感器的测量误差对测距结果的影响反映为线路长度的变化Δx,并将Δx称为综合非线性误差。对于一条给定长度为L的线路,考虑综合非线性误差后,线路实际长度为L+Δx。将Δx沿全线路分配,故障测距时若仍按线路长度为L进行计算,则相当于线路单位长度的阻抗Z和导纳Y各变为原来的1+Δx/L倍。为叙述方便,本文定义线路参数修正系数为α=Δx/L,当利用分布参数模型进行分析时,线路特性阻抗和传播系数变为[14]:
(1)

(2)
由式(1)和式(2)可见,对于一条分布参数线路,采用分配了综合非线性误差的参数进行计算时,线路特性阻抗Zc不变,线路传播系数γ则变为原来的1+α倍。因此,本文在后续分析中,均以Zc和(1+α)γ作为修正后的线路特性阻抗和线路传播系数参与计算。
1.2 故障测距方程组
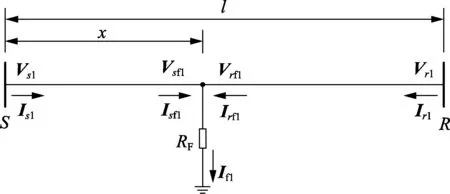
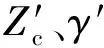
图1 非对称故障等值正序网Fig.1 Positive-sequence equivalent circuit of unbalanced fault
图2 非对称故障等值负序网Fig.2 Negative-sequence equivalent circuit of unbalanced fault
线路发生非对称故障后,正序等值网络和负序等值网络分别如图1和图2所示[15]。图中,l为线路全长;x为故障点到S端的距离;RF为故障过渡电阻;Vs1、Vs2和Is1、Is2分别为S端的正序、负序电压和正序、负序电流;Vr1、Vr2和Ir1、Ir2分别为R端的正序、负序电压和正序、负序电流;Vsf1、Vsf2和Isf1、Isf2分别为从S端推算至故障点的正序、负序电压和电流;Vrf1、Vrf2和Irf1、Irf2分别为从R端推算至故障点的正序、负序电压和电流;If1、If2分别为流过故障支路的正序、负序电流。
根据图1和图2,计及线路参数误差的影响,根据分布参数线路的计算公式可得电路方程为:
(3)
其中,i取1、2时分别表示正序和负序。
设线路的双端数据不同步角为δ,则根据故障点电压相等可得:
ejδVsf1=Vrf1
(4)
ejδVsf2=Vrf2
(5)
将式(4)和式(5)作商,可消除不同步角δ,有:
f(X)=Vsf1Vrf2-Vsf2Vrf1=0
(6)
其中,X=[x,α]。
式(6)为一个复数方程,可将其解耦为实部方程与虚部方程,进而组成故障测距方程组:

(7)


图3 线路双端安装并联电抗器的故障网络Fig.3 Fault network of transmission line withshunt reactors at both terminals
此时从S端流入线路的实际故障电流Isi为:
(8)
类似地,可通过式(8)计算得到从R端流入线路的实际故障电流Iri。
因此,当线路双端加装并联电抗器时,利用式(8)可计算得到流入线路双端的实际故障电流,将其代入式(3)来推导建立故障测距方程组。
上述故障测距方程组以故障距离和线路参数修正系数为未知量,基于故障点电压相等的原理推导得到,主要具有以下特征:
a. 无需双端数据同步,仅利用故障后的双端电压、电流参与运算,所用数据量小;
b. 仅以故障距离x和线路参数修正系数α这2个参数为待求量,方程计算量小;
c. 利用所定义的线路参数修正系数消除了线路参数、长度变化对测距结果的影响,无需已知准确的线路参数即可进行故障测距。
据此,准确求解方程组式(3)即可得到较为精确的故障距离。
2 故障测距方程组的ELM算法求解模型
目前求解形如F(X)=0的多维非线性方程组通常应用最小二乘迭代法,但该方法对初值较敏感,有时无法收敛于全局最优解。考虑到ELM算法全局寻优能力较强,本文将故障测距方程组转化为函数优化问题,并应用ELM算法进行求解[16]。
2.1 ELM算法基本原理

(9)


(10)
完成粒子电荷值计算与矢量力计算后,ELM算法通过种群移动模型对种群进行更新,产生新一代种群。本文的种群进化数学模型为:
(11)
(12)
2.2 求解步骤
在具体应用时,以本文所构建的故障测距方程组F(X)函数作为ELM算法的适应度函数,然后利用式(11)对其进行迭代求解,即可得故障距离x。基本求解步骤如下,算法流程如图4所示。
a. 参数初始化。设置种群规模m、粒子维数n、停滞迭代次数K、最大迭代次数等参数。由于待求量为x和α,粒子维数n设为2。
b. 种群初始化。在可行解空间内随机生成初始种群。
c. 计算种群中每个粒子的适应度函数值,电荷值和个体矢量力大小。
d. 根据式(11)对种群进行更新产生新一代种群,将新种群和前代种群适应度函数进行比较,保留当前代最优解。
e. 判断是否满足算法的终止条件,若未满足,则转入步骤c继续重复迭代步骤;若已满足终止条件,则输出最优解以及目标函数值。
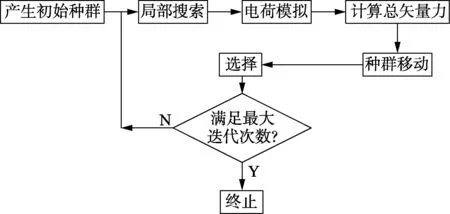
图4 ELM算法求解步骤流程图Fig.4 Flowchart of ELM algorithm
3 仿真分析
3.1 仿真模型描述
参考京津唐500 kV超高压输电线路,在PSCAD软件中采用分布参数模型建立一条长为300 km、双端带并联电抗器的500 kV的输电线路仿真模型,如图5所示。具体仿真参数如下:单位长度正序电阻r1=0.028 3 Ω/km、单位长度零序电阻r0=0.114 8 Ω/km;单位长度正序电感l1=0.898 4 mH/km、单位长度零序电感l0=2.288 6mH/km;单位长度正序电容c1=0.012 9 μF/km、单位长度零序电容c0=0.005 2 μF/km;两侧系统等效阻抗分别为ZS=1.051 5+j43.176 Ω、ZR=1.057 7+j44.92 Ω。并联电抗器的参数为XL=1 680.56 Ω、XN=434 Ω。
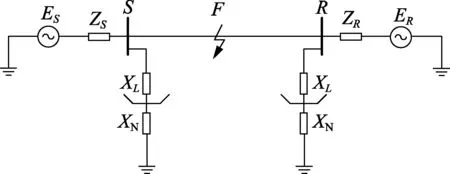
图5 仿真系统示意图Fig.5 Schematic diagram of simulation system
基于所建立的仿真模型,可设定典型非对称故障,进而针对各类典型故障在不同故障位置、不同线路参数、不同线路长度与不同非同步角时的情况进行仿真,使用本文所提算法进行测距。
3.2 仿真结果分析
表1— 4分别列出了当线路参数准确与线路参数发生变化时,本文算法与传统不考虑线路参数误差的双端不同步测距方法(以文献[9]算法为例)测距结果的对比。其中,双端数据不同步角为20°。
由表1可见,当线路参数准确时,在线路典型非对称故障下,本文所提算法与传统双端不同步测距方法基本不受故障类型的影响,测距结果非常接近,其精度均能满足要求。
由表2— 4可见,当线路参数或线路长度发生变化时,本文算法的测距结果与线路预设的故障位置基本一致,其相对误差不超过0.3%,最大绝对误差为0.81 km。而传统算法测距结果的相对误差最小为2.77%,最大可达5.63%,其最大绝对误差更是达到了17.73 km。显然,本文算法能够有效克服线路参数不确定性的影响,其测距结果的精度更高,基本可将测距偏差控制在1~2个杆塔距离之内。
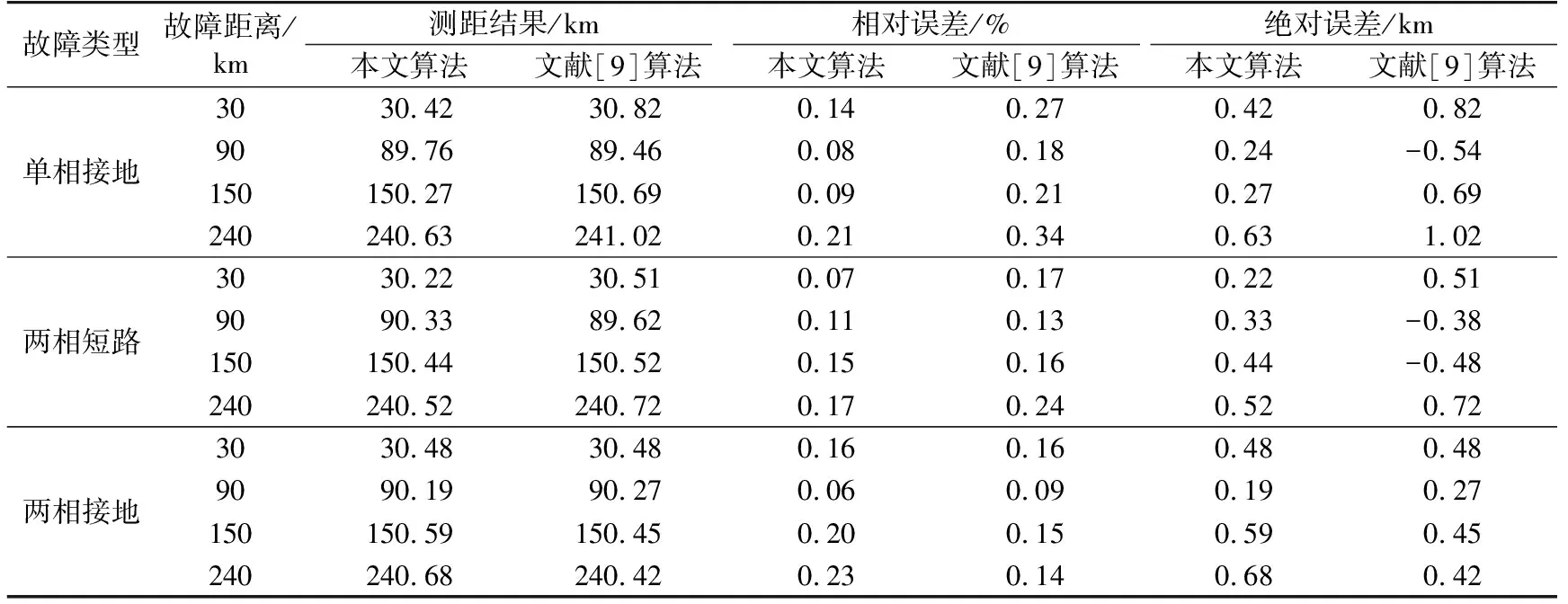
表1 线路参数、长度准确时的故障测距结果(过渡电阻50 Ω)Table 1 Fault location results under accurate line parameters and length,with 50 Ω transient resistance
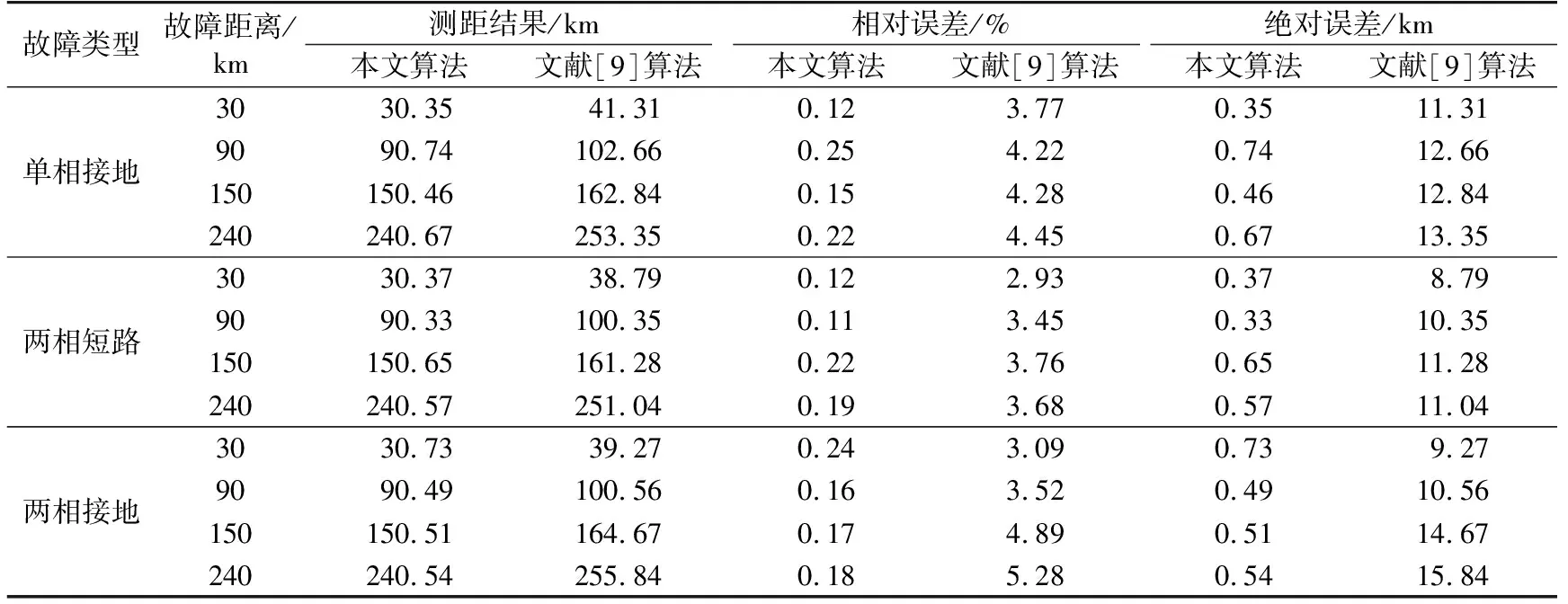
表2 线路参数变化10%、线路长度准确时的故障测距结果(过渡电阻100 Ω)
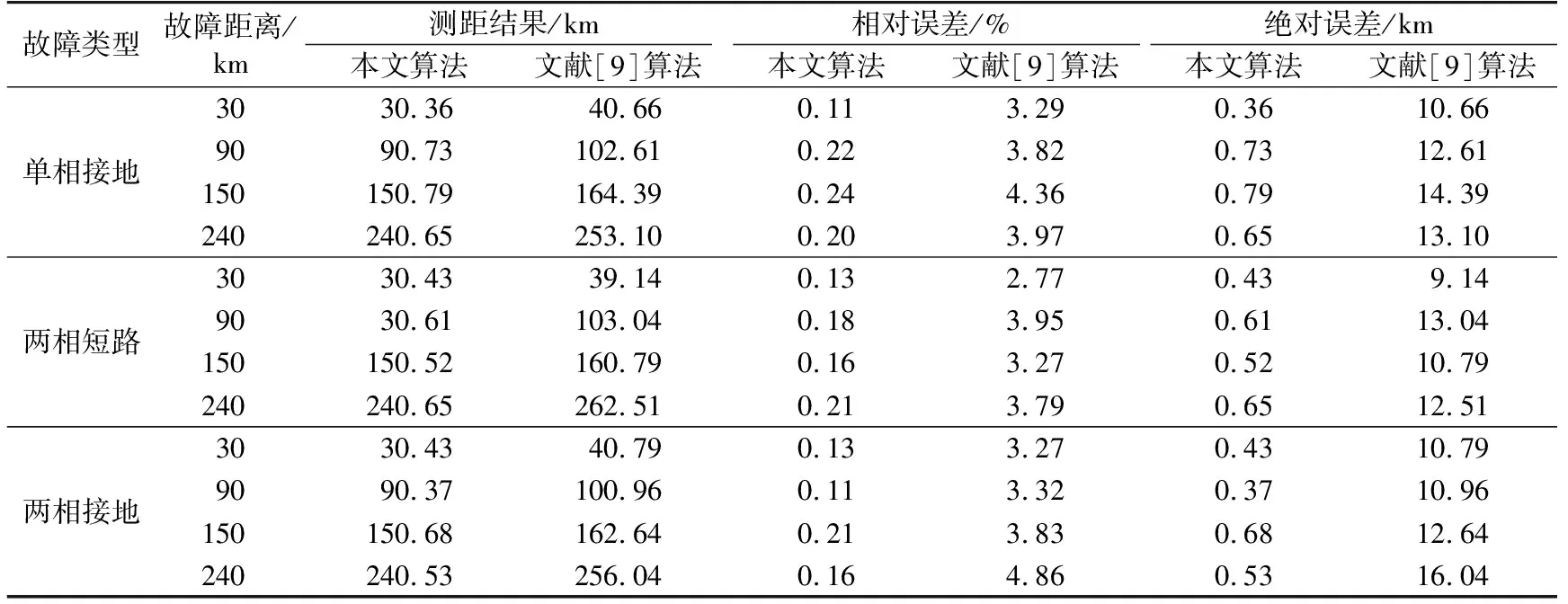
表3 线路参数准确、线路长度变化10%时的测距结果(过渡电阻100 Ω)Table 3 Fault location results under acurrate parameters,10% error of line length and 100 Ω transient resistance
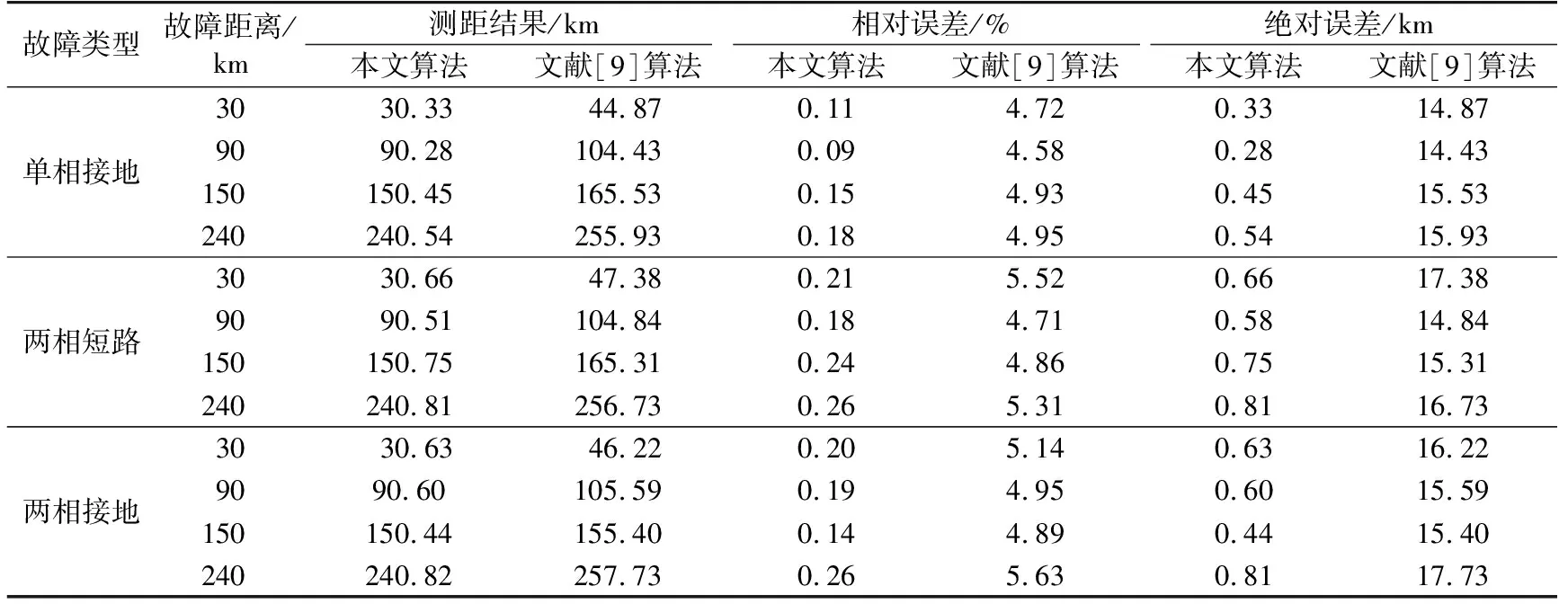
表4 线路参数、长度均变化5%时的测距结果(过渡电阻100 Ω)Table 4 Fault location results under 5% error of both line length and parameters,and 100 Ω transient resistance
图6给出了当线路等分为3段、发生单相接地故障时测距误差随故障位置的变化情况,其中,第1段线路参数准确,第2段线路参数变化5%,第3段线路参数变化-5%。由图可知,当线路沿线参数变化不一致时,本文方法较传统方法仍能保持较高的测距精度,测距误差在1%左右。当发生其他非对称故障时,仍有相同结论。

图6 测距误差特性曲线Fig.6 Curve of fault location error
表5列出了不同步角发生变化时本文算法的测距结果。由表可知,本文算法基本不受不同步角的影响,最大测距误差始终不超过0.9 km。
为进一步说明本文选用ELM算法对故障测距方程组求解的可靠性,表6给出了在线路参数修正系数α取不同值的情况下,距离线路首端90 km处发生单相接地故障时,分别应用ELM算法和最小二乘法对故障测距方程组进行求解的结果。其中,线路参数准确时α=0;线路参数变化5%和线路长度变化5%时均有α=-0.047 6。由表6可知,ELM算法能够更快、更准确地求解x和α。在其他工况下仍有相同结论。

表5 不同步角变化时的测距结果Table 5 Fault location results of different asynchronous angles
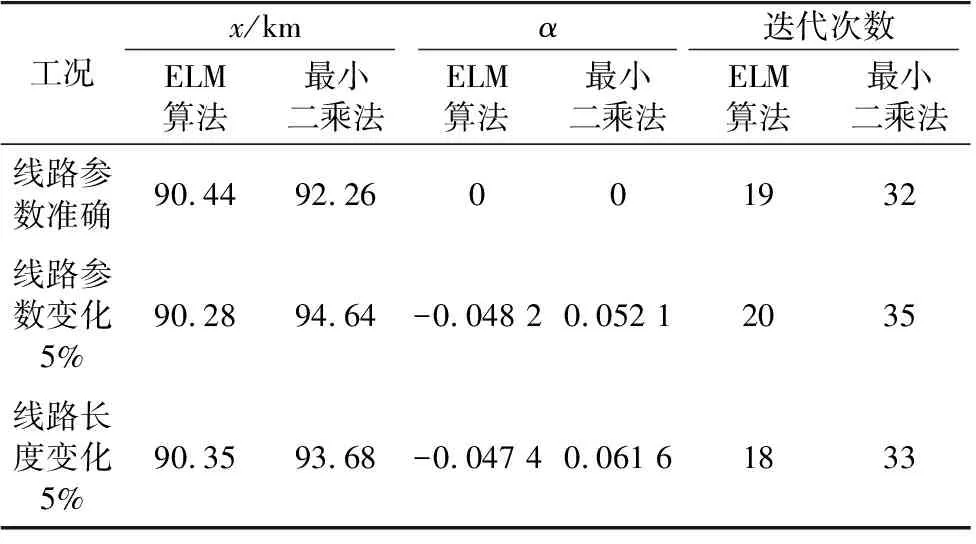
表6 ELM算法与最小二乘法的求解效果对比Table 6 Comparison of solving results between ELM algorithm and least square method
4 实例验证
为验证本文所提算法在工程应用中的有效性,本文采用上海某220 kV线路在2015年10月发生C相单相接地故障时,由调度中心获取的两端故障录波器所记录数据进行验证。该线路长26.8 km,经巡线确定此次故障位于距离线路首端8.36 km处。该线路的理论参数如表7所示;故障录波器所记录的电压、电流的波形分别如图7所示;对故障后1个周期的线路双端电压、电流进行滤波处理,计算得到其对应的序分量如表8所示。应用本文算法得到故障距离为8.57 km,与巡线结果基本一致,再次说明了本文所提算法的有效性,并可用于工程实际。

表7 线路单位长度参数表Table 7 Line parameters per kilometer

图7 故障录波波形Fig.7 Recording waveforms of voltage and current
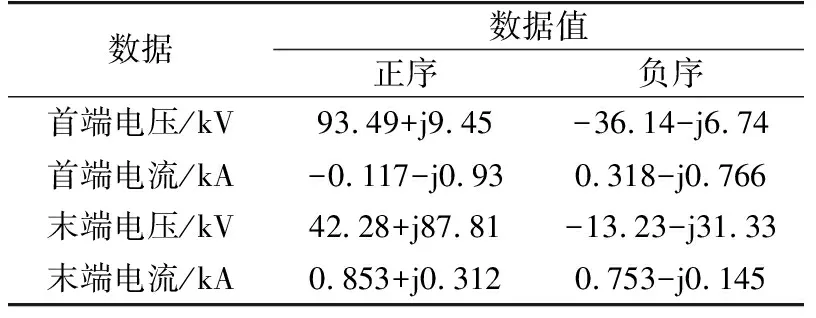
数据数据值正序负序首端电压/kV93.49+j9.45-36.14-j6.74首端电流/kA-0.117-j0.930.318-j0.766末端电压/kV42.28+j87.81-13.23-j31.33末端电流/kA0.853+j0.3120.753-j0.145
5 结论
本文针对高压输电线路的非对称故障提出了基于参数修正的双端不同步测距算法,分析仿真计算与实际数据的验证结果得到如下结论。
a. 通过等值序网分析建立的非对称故障测距方程组从原理上消除了线路双端数据不同步和线路参数不确定性对测距的影响,仅利用故障后的双端数据即可实现双端不同步条件下的参数自适应测距,计算量小。
b. 基于ELM算法对故障测距方程组的优化求解,为实现基于参数修正的双端非同步故障测距提供了有效的优化求解途径。
c. 本文所提测距算法不受故障类型、线路参数变化、线路长度变化以及故障位置等因素影响,其仿真测距误差不超过0.9 km,可将测距偏差控制在1~2个杆塔距离之内;应用实际故障数据进行定位所得到的结果与巡线结果一致,较传统测距算法具有更高的测距精度,能满足工程要求。
猜你喜欢
中学生数理化·七年级数学人教版(2022年5期)2022-06-05
上海大中型电机(2021年2期)2021-07-21
语数外学习·初中版(2020年5期)2020-09-10
数学物理学报(2019年3期)2019-07-23
西南交通大学学报(2018年6期)2018-12-18
测控技术(2018年10期)2018-11-25
山东工业技术(2016年15期)2016-12-01
核科学与工程(2015年2期)2015-09-26
湖州师范学院学报(2015年4期)2015-03-11
数学年刊A辑(中文版)(2014年3期)2014-10-30
