
一种高精度APNCKF算法在谐波检测中的应用
2018-08-24 08:49,,,
计算机测量与控制 2018年8期
,,,
(长沙理工大学 电气与信息工程学院,长沙 410114 )
0 引言
谐波检测是谐波问题中的一个重要分支,对谐波的分析和测量是电力系统分析和控制中的一项重要工作,也是治理谐波问题的出发点和主要依据[1]。准确而又快速地检测出电力系统中的电力谐波,具有重要的工程实际意义[2]。
由于各种冲击性负荷(高铁等)、新能源(风电和光伏发电等)和电动汽车的接入,电网谐波实时精确检测仍是电能质量测试技术的难点和热点之一。常规的谐波检测方法主要有:快速傅里叶变换及其改进算法、小波变换、HHT算法等[3-10]。DFT算法实用、稳定、有效,采用FFT可以提高算法的实时性[3];但是频率分辨率有限,对于临近的频率成分无法检测[4]。改进算法中大多采用加窗谱线插值[5-6],虽然加窗谱线插值FFT算法谐波参数的检测精度较高,但是间谐波参数检测却相对较低,而且在低信噪比条件下,间谐波参数的检测下降比较明显[7];谱估计算法对有限时宽的信号有无限的频率分辨率,但需要进行大型矩阵运算,实时性不好,且需要对信号进行准确定阶,对于电网宽带多频的信号无法直接检测,稳定性不好;Prony 算法同样受噪声干扰的影响,谐波参数的检测精度不高,在一定程度上限制了算法的实际应用[7-8]。小波变换和HHT可以实现非平稳的电力系统谐波分析;但是HHT 法在模态分解时存在模态混叠的现象,小波变换在用小波滤波器进行谐波分解时存在频带混叠现象,影响了算法的检测精度[9-10]。IEC算法本质上是DFT的频谱分组算法,精确计算的前提是尽可能实现同步采样,实时性较好;但是仅仅针对谐波幅值的计算,没有考虑谐波相位的计算。卡尔曼适用于平稳和非平稳过程,考虑到真实电网信号固有的随机性和非平稳性[11]。卡尔曼已广泛应用于频率跟踪、测量谐波分量、暂降等场合[12-13]。但是卡尔曼算法也存在一些难点,如噪声统计特性的确定,特别是过程噪声[14-15]。又如系统初始状态和初始协方差的设置。通常情况下,过程噪声统计特性(协方差)随时间变化而变化,可能导致卡尔曼具有较大的估计误差或甚至发散[16-17]。
为进一步提高含噪环境下谐波检测的精确度,且不断的在线辨识出过程噪声协方差,提出了一种自适应过程噪声协方差卡尔曼滤波算法(Adaptive Process Noise Covariance Kalman Filter ,APNCKF)。该算法利用序贯最大化可信度更新先验信息,然后通过卡尔曼进行迭代运算,估计出相应的幅值和相位。通过在MATLAB环境下进行谐波仿真验证,该算法在准稳态条件下较好地跟踪电力系统谐波状态,计算精度高。
1 APNCKF滤波的基本原理
卡尔曼滤波算法适用于线性系和部分非线性系统,被广泛应用于谐波分量检测、频率跟踪等场合。
1.1 APNCKF系统建模
电力系统中观测信号包含基波、谐波和噪声信号,可表述为:
(1)
式中,A1,k(r=2,…,M)、φr,k为r次谐波的幅值和相位,M为谐波的最高次数,ek为高斯噪声信号。
若取如下状态变量:
其中:
相应地,将观测信号(1)可转换成如下的状态空间形式:
(2)
式中,ηk是均值为0方差为Qk的高斯白噪声;vk是均值为0方差为Rk的高斯白噪声。矩阵F,H,Qk,Rk分别定义为:
(3)
则各个频率分量的幅值和相位可以由式(4)表示:
(4)
式中,x2r-1,k、x2r,k可以由模型(2)得到最优估计。
由卡尔曼滤波(Kalman Filter,KF)理论对谐波进行检测的算法如下:

预测:
(5)
滤波:
(6)
1.2 APNCKF在线辨识过程噪声
KF应用在谐波分量检测时,过程噪声统计特性(协方差)随时间变化而变化,可能导致KF具有较大的估计误差或甚至发散。针对噪声统计特性的不确定性,本文采用序贯最大化可信度更新先验信息的方法来在线辨识系统的过程噪声,则使用模型(2)对xk进行最优估计时,KF具有较高的滤波精度。APNCKF方法认为噪声均值为0,对噪声二阶中心矩(协方差)进行估计。
贝叶斯理论可知,可由下式估计噪声Qk:
(7)
又因为Qk没有先验信息p(Qk|y1:k-1),则可由最大化可信度密度函数p(yk|y1:k-1,Qk)来估计Qk,即为:
max{p(yk|y1:k-1,Qk)}
(8)
(9)
(10)

当qk=0时:
(11)
(12)
(13)
(14)

(15)
从而得到序列更新qk:
分析可知,只有15家高职高专院校图书馆对岗位职责给出了详细描述,且集中在图书流通和参考咨询两方面。同本科院校图书馆一样,高职高专图书馆在其他需求上较为注重馆员的工作经历,不同的是,其对英语、计算机等相关证书没有做出要求。
(16)
此方法只通过一个时刻的预测误差来对过程噪声协方差Qk进行修正,因此可信度不高。若利用多个时刻预测误差的均值进行修正,则此方法更有效,更准确。设有N个时刻,则预测误差均值为:
(17)
将式(18)代入式(17)可得:
(18)
其中:
(19)
因此,进行最优估计时,参数qk(或过程噪声协方差Qk)的变化就能体现出信号的动态变化,从而实现谐波的跟踪和检测。且可由式(4)中状态变量的幅值、相位曲线图获得基波和各次谐波的信息,对这些信息进行综合判断,统计分析,可以提高抗噪能力,增强鲁棒性,提高对扰动时刻的准确性。
2 算例分析
本文通过常规卡尔曼、小波变换、KF-ML以及APNCKF进行仿真实验,验证APNCKF算法的在谐波检测中的有效性,且该自适应算法的收敛速度、滤波精度及实时性显著提升。
通过Matlab构造信号yt来模拟含有谐波的电压信号,其由基波、3次、5次谐波以及不同信噪比噪声叠加获得,采样频率10 kHz。信号如图1所示。
yk=E1,kcos(2πfkTs+φ1,k)+E3,kcos(6πfkTs+φ3,k)+E5,kcos(10πfkTs+φ5,k)+vk
(20)
其中:vt表示信噪比(SNR)值为40 dB,30 dB和20 dB的高斯白噪声,即高斯白噪声标准差分别为0.01 p.u,0.0316 p.u和0.1 p.u。电压幅值Ei,t(i=1,3,5)和相位φi,k(i=1,3,5)模拟如下:
(21)
且:
(22)
显然,谐波扰动发生的时间为0.04~0.16 s,且电压暂降的时间为0.08~0.12 s。

图1 谐波干扰的电压信号(yt,y1,t,y2,t,y3,t分别为纯净,SNR为40 dB,30 dB和20 dB的电压信号)
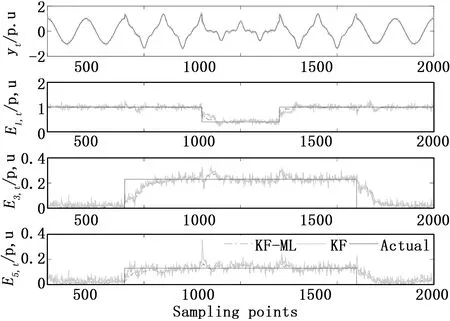
图2 20 dB下KF-ML估计出的电压信号(E1,t,E3,t,E5,t分别为基波,3次和5次谐波的幅值)
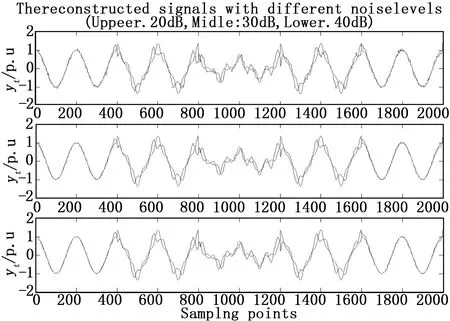
图3 小波重构信号
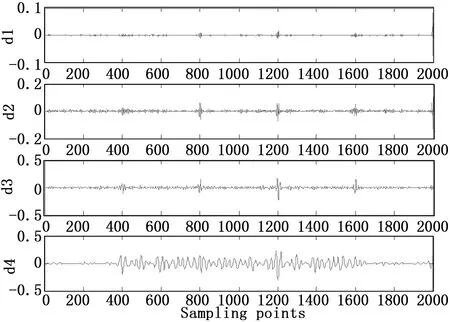
图4 SNR=20 dB的四层小波分解
图2给出了SNR=20 dB下KF-ML与常规KF对谐波的最优估计。图3给出了实际信号与重构后的WT信号比较;图4给出了SNR为20 dB时小波分解的结果。
从图2可以看出常规KF在低信噪比时幅值曲线图波动较大,对奇异值不能很好的跟踪和检测,精确度低。且常规KF的滤波性能依赖于系统噪声的先验统计信息,不准确的系统噪声统计会导致KF滤波精度降低甚至发散。KF-ML算法则利用最大似然做为准则自适应地优化系统噪声,从而提高其性能。从表1中可以看到KF-ML算法的RMSE值均小于KF和WT,这也验证了KF-ML具有比KF更好的估计性能。但从图2可知,KF-ML算法在基频的幅值估计非常接近实际幅度,对电压幅值响应也非常快速和准确;而在对谐波进行检测时,相对于基频的下降沿则表现出一些时延。其虽能比较准确地估计出谐波的幅值,但精度仍较差。

表1 不同算法的均方根误差对比结果
图3所示,由于谐波干扰,WT的重构信号明显偏离实际信号。在图4中,即SNR=20 dB时,小波系数d2,d3恰好在电压暂降和谐波干扰处达到峰值,d4出现明显的振荡,表明在SNR=20 dB情况下,电压暂降起止时小波系数峰值不明显,这表明db4小波函数检测性能随着信号噪声比的降低而变差。而从表1中也可以看到WT的RMSE值均高于KF和KF-ML。则随着信号被噪声和谐波严重污染时,WT精确度低、响应速度慢。

图5 20 dB时APNCKF估计出电压信号的幅值和相位
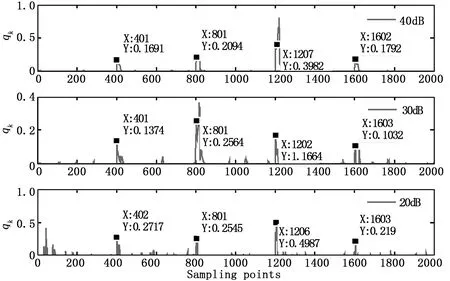
图6 APNCPF中参数qk的变化过程
图5为20 dB时APNCKF 估计出电压信号的幅值和相位图;图6为APNCPF中参数qk的变化过程。由图5可知,即使在高斯随机噪声比较强的情况下,APNCKF的估计信号与实际信号仍紧密匹配,进行很好地跟踪与检测。而KF估计的信号则具有一些不匹配的采样点,例如在第400个采样点与第500个采样点之间、第800个采样点与第900个采样点之间、第1 200个采样点与第1 300个采样点之间以及在第1 600个采样点与第1 700个采样点之间,即发生谐波,电压暂降和相位跳变的点与实际信号不匹配。因此,当跟踪信号的突然变化时,KF的性能变差。对于幅值和相位的最优估计,即使这些干扰比较轻微,APNCKF对异常值(例如电压暂降,相位跳跃或谐波干扰)的响应也快得多。这种精确地检测为电力系统安全运行提供重要保证,这是因为APNCKF根据序贯最大化可信度更新先验信息的方法来实时辨识系统的过程噪声,对异常值(如谐波干扰或相位跳变)敏感。如图6所示,每个子图中有三组采样点,其中参数突变非常接近谐波起止时间、电压暂降以及相位跳变。因此,参数的动态变化可用于检测谐波、相位跳变和电压暂降。从表2可以看出,APNCKF在不同信噪比的情况下MAE和RMSE值均低于KF-ML,远低于KF。这表明APNCKF可以获得比传统的KF和KF-ML更好的估计性能。与自适应KF-ML相比,参数qk对异常值敏感,它更容易检测到干扰。因此,APNCKF优于用于检测干扰的自适应KF-ML。

表2 不同算法误差对比结果
3 结论
在电力系统谐波检测中,系统随机噪声信息不完全可知,这可能会导致滤波器的估计精度不高;针对这一问题,采用序贯最大化可信度更新先验信息来实时辨识系统过程噪声,提出了一种自适应过程噪声协方差卡尔曼滤波实现检测电能质量扰动的时域方法。通过仿真和分析得出以下结论:
1)卡尔曼滤波器在进行谐波检测时,时变的过程噪声可能引起滤波精度低、甚至发散等问题,基于序贯最大化可信度更新先验信息的方法来辨识系统的过程噪声,提高了系统的稳定性以及检测精度。
2)该算法与小波变换、常规卡尔曼以及基于最大似然准则的卡尔曼相比,当信号被随机噪声和谐波严重污染时,小波变换精确度低且响应速度慢;基于最大似然准则的卡尔曼在信噪比较低时,波动十分明显,精度较差;而APNCKF在不同信噪比下MAE和RMSE值均较低,表现出较好的性能。
3)APNCPF中参数qk对异常值十分敏感。出现谐波干扰时,表现出不同幅度的峰值,更好的进行跟踪与检测,实时性强。
猜你喜欢
消费电子(2022年6期)2022-08-25
装备维修技术(2022年7期)2022-07-01
云南电力技术(2021年6期)2022-01-18
舰船电子工程(2020年3期)2020-06-11
计算机应用与软件(2019年2期)2019-04-01
电子制作(2018年17期)2018-09-28
电子制作(2018年9期)2018-08-04
经济研究导刊(2018年19期)2018-07-24
中国新技术新产品(2018年22期)2018-01-05
