
基于扰动观测器的机械臂自适应反演滑模控制
2018-08-24 08:50,,,2
计算机测量与控制 2018年8期
,,,2
(1.河南科技大学 信息工程学院,河南 洛阳 471023; 2.河南科技大学 电气工程学院,河南 洛阳 471023)
0 引言
机械臂凭借灵活操作型,在工业制造、农业采摘及航天探索等领域有着广泛的应用[1-3]。在许多实际任务中,对机械臂实现精确的轨迹跟踪控制必不可少。但是,机械臂属于一类非线性复杂系统,并且具有较强的耦合特征,其数学模型存在一定的不确定性,主要包括参数不确定性、未建模动态和外界未知干扰等[4]。
模型的不确定性使机械臂的轨迹跟踪控制变得困难,为了克服这个问题,自适应控制、鲁棒控制、滑模控制、模糊控制和神经网络控制等多种方法被大量采用。然而,由于算法的局限性,单一的控制算法通常很难达到预期的效果。因此,根据不同算法的特点,众多学者尝试了各种混合控制策略,以实现机械臂精确跟踪期望轨迹,并取得了较好的效果。
文献[5]使用RBF神经网络为参数完全未知的机械臂在关节空间设计了一种新的自适应神经网路控制算法,实现了闭环系统所有信号的最终一致有界,而且沿着周期或回归跟踪轨迹实现了部分神经网络权值的收敛以及未知闭环系统动态的局部准确逼近,即确定学习。文献[6]提出了一种用于空间机械臂轨迹跟踪控制任务的自抗扰控制算法,将系统模型及未知外扰作为系统的总和扰动,并利用扩张状态观测器对该扰动进行观测补偿,提高了系统的抗扰性能。文献[7]在不确定动力学的假设下,利用模糊自适应控制,解决了模型不确定的机械臂轨迹跟踪控制问题,同时实现了机械臂在工作空间中的避碰规划。针对具有内部参数不确定性和外部干扰的电驱动自由空间机械手,文献[8]提出了一种基于干扰观测器的模糊自适应鲁棒跟踪控制方法。采用其中基于自适应扰动观测器的输出反馈控制来解决控制问题,模糊逻辑系统在线调整参数以补偿等效干扰。文献[9]介绍了一种基于动态结构模糊小波神经网络(FWNNs)的鲁棒自适应控制结构,结构性和非结构性不确定性由模糊小波神经网络补偿,自适应滑模控制对各种动态参数进行在线调整,最终实现工业机械臂的轨迹跟踪控制。此外,文献[10]给出了一种基于模型预测控制算法的排爆机器人末端轨迹跟踪方法。文献[11]提出了一种自适应二阶滑模控制方法,解决系统不确定性缺少上界先验知识的问题。
上述方法均实现了对机械臂系统的轨迹跟踪控制,但是在考虑模型不确定性的时候,大多数将结构性不确定性(包括参数不确定、未建模动态等)与非结构性不确定性(包括外界干扰,测量误差等)合并为一个未知变量处理。本文分别考虑参数不确定性和外界未知干扰,提出了一种基于非线性扰动观测器的自适应滑模控制策略。利用非线性扰动观测器对未知扰动进行观测补偿。并在反演滑模控制中引入自适应律,保证闭环系统的稳定性同时提高系统的鲁棒性。以二连杆机械臂为例,仿真结果表明,提出的控制策略可以实现关节轨迹的快速跟踪,并效价抑制滑模控制的抖振。
1 机械臂动力学模型
针对一类n关节串联型刚性机械臂,由拉格朗日功方程可得其动力学[12]表达式:

(1)
实际应用中,由于机械臂仅部分参数已知,并且存在未建模动态及未知外界干扰,很难得到精确的数学模型。因此,考虑模型不确定性和外界,完整的机械臂动力学方程可表示为:

(2)
其中:F表示模型误差,包括参数不确定性和未建模动态;d(t)表示外部扰动。对二者作如下假设:


(3)
式中,y为系统输出。
2 控制器设计
为了消除模型不确定性对系统性能的影响,设计一种基于扰动观测器的自适应反演滑模控制器。设计过程中,扰动观测器用来对外部扰动进行观测补偿,自适应律则弥补模型误差带来的影响。完整的控制器结构如图1所示。
2.1 非线性扰动观测器
据机械臂系统模型,采用如下形式的非线性扰动观测器[13]:
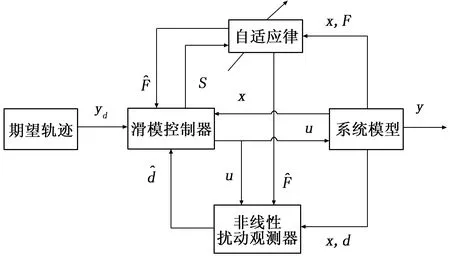
图1 控制器结构图

(4)


(5)
根据假设1,由式(3)~(5),可得观测器的动态方程为:

(6)
(7)
由此可知,选择合适的正定矩阵L(x),观测器误差可按指数收敛。
(8)
2.2 反演滑模控制
设期望轨迹为yd,系统跟踪误差可定义为:
z1=y-yd
(9)
对z1求导,可得:
(10)
取虚拟控制量α1=c1z1,c1>0.定义:
(11)
定义Lyapunov函数:
(12)
则:
(13)

对z2求导,可得:
(14)
定义Lyapunov函数:
(15)
式中,s为滑模面函数,且:
(1)对于一个探测器,一组值均匀地覆盖其参数范围。如果检测器具有P个参数,则为每个参数分别计算出4个均匀分布的值。每个参数4个值的组合将在检测器的参数空间中给出4P个点。
s=kz1+z2,k≥0
(16)
(17)
对V2求导,可得:
(18)
2.3 自适应律
在反演滑模控制的基础上,引入自适应律,对系统模型误差进行预估补偿。定义Lyapunov函数:
(19)
对V3求导,可得:
(20)
由式(20)得滑模控制律器为:
(21)
其中:h>0,β>0.
(22)
2.4 稳定性证明
将式(21)和式(22)代入式(20),可以得到:
(23)
选择如下转换矩阵:
(24)

(25)
由式(23)可得:
(26)
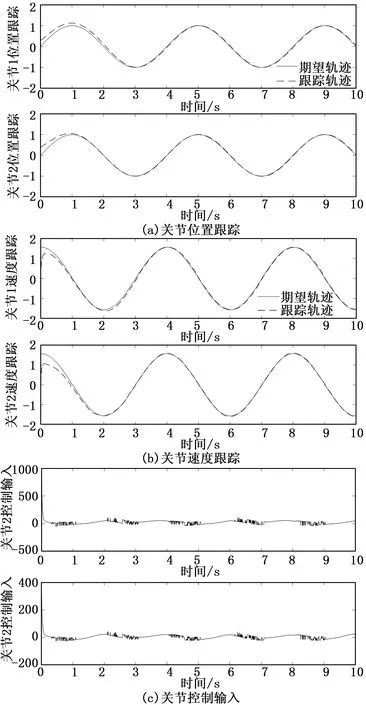
图3 反演滑模控制(无扰动观测器)
3 仿真实例
以双关节机械臂为例,如图2所示,利用所提出的控制策略,进行仿真实验。
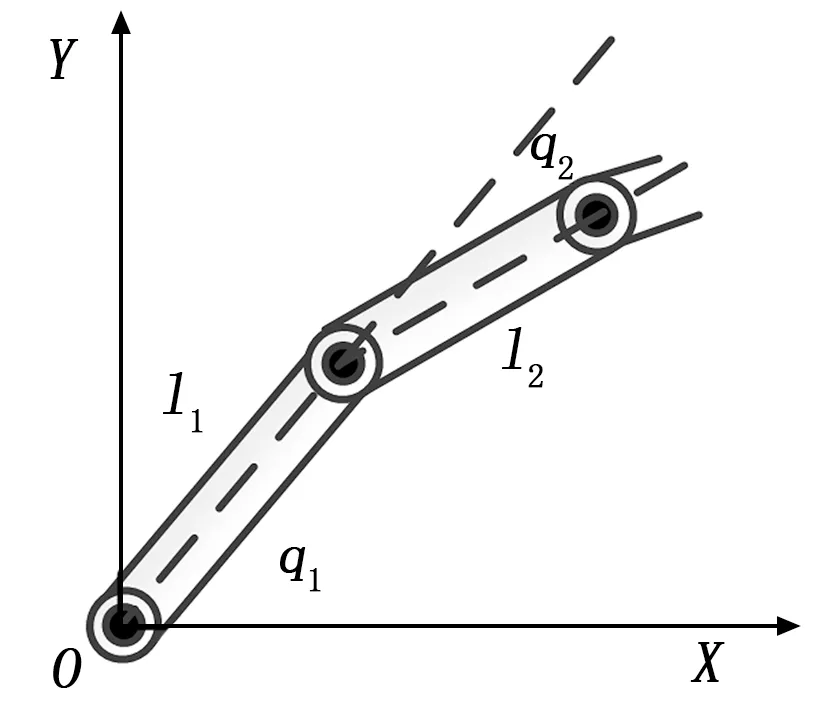
图2 机械臂模型示意图

图4 基于扰动观测器的自适应反演滑模控制
机械臂的参数选取:m1=1 kg,m2=2 kg,l1=1 m,l2=0.9 m,g=9.8。控制器参数选取:γ=5,β=1,c=diag(3,3),h=diag(1,1),k=diag(2,2).
系统不确定项F=[2sin(πt);3cos(πt)]。
利用Matlab软件,分别对基本反演滑模控制器和本文提出的基于扰动观测器的自适应滑模控制器进行仿真实验,结果如图3~5所示。
图3为基本反演滑模控制器的仿真结果。可以看出,机械臂两个关节的位置及速度在1 s之后实现跟踪;控制输入包含较大的抖振。
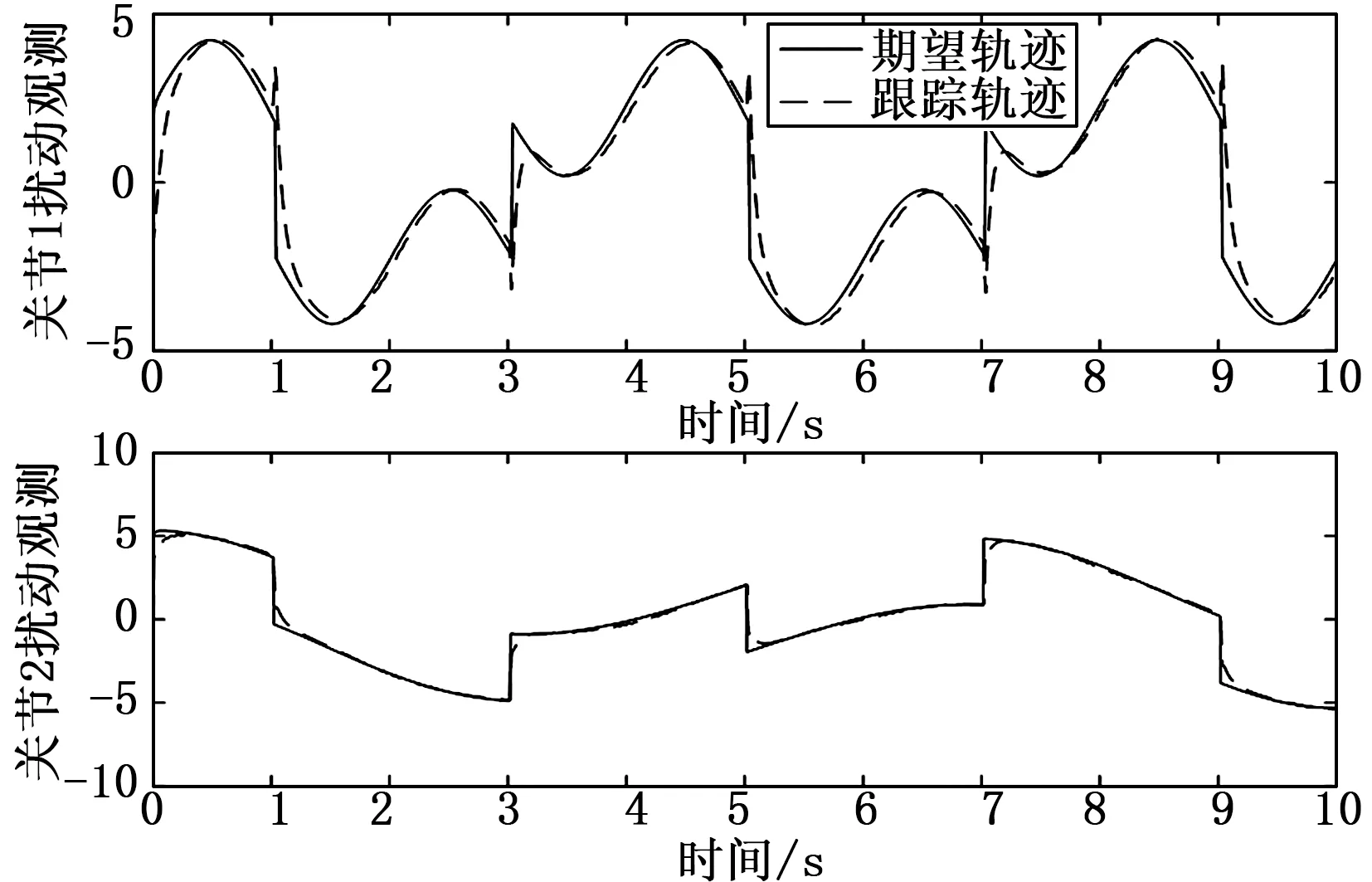
图5 关节扰动观测结果
图4~5为包含扰动观测器的自适应反演滑模控制器的仿真结果。图4显示机械臂的两关节均在0.5 s内实现完全跟踪,且跟踪误差基本为0;关节控制输入稳定。图5关节扰动观测结果,表明所设计的非线性干扰观测器对外加干扰观测效果良好。
对比图3和图4可以看出,基本反演滑模控制器的关节位置跟踪和关节速度跟踪效果一般,跟踪速度较慢,并且关节控制输入存在较强的抖振现象;引入干扰观测器和自适应律的反演滑模控制器,关节位置跟踪和速度跟踪误差均基本为零,跟踪速度加快,效果改善明显,且关节控制输入的抖动得到抑制。
4 结论
针对机械臂动力学模型的特点,分别考虑结构参数的不确定性和外界未知干扰,提出了一种基于扰动观测器的自适应反演滑模控制器。非线性扰动观测器对外界干扰进行观测补偿,无需上界先验知识;反演滑模控制保证了系统的稳定性和鲁棒性,自适应律的引入进一步提高了系统的动态适应性。对二连杆机械臂的跟踪控制进行仿真实验,结果证明,和基本的反演滑模控制器相比,所提出的方法可以实现关节角度和速度的快速、准确跟踪,并且有效抑制控制输入抖振,控制效果明显改善。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
现代电力(2022年2期)2022-05-23
山东建筑大学学报(2021年6期)2021-12-23
北京航空航天大学学报(2021年7期)2021-08-13
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
北京航空航天大学学报(2017年6期)2017-11-23
