
修正钟差和方位误差的X射线脉冲星导航
2018-08-24 08:50,,,2,
计算机测量与控制 2018年8期
,,,2,
(1.西安理工大学 自动化与信息工程学院,西安 710048;2.中国科学院 西安光学精密机械研究所瞬态光学与光子技术国家重点实验室,西安 710119)
0 引言
目前,深空探测器一般都需要地面站的支持才能进行导航。但随着深空探测器距离地面越来越远,该导航方式无法提供高精度、实时性的导航信息[1]。而提供精确实时的导航信息是所有深空探测的前提和基础。所以,深空探测器的自主导航已成为近年来国内外研究的热门课题[2]。
然而深空探测器经过较长时间的探测任务后,探测器的时钟会发生漂移[3]。而时钟漂移会造成系统偏差[2],从而降低X射线脉冲星导航的定位精度。并且脉冲星本身存在的方位偏差也会影响X射线脉冲星导航的定位精度[4]。
针对以上问题,本文提出一种考虑钟差修正与脉冲星方位误差的X射线脉冲星导航方法。 首先, 使用X射线探测器测量脉冲星导航航天器的时间。根据钟差修正模型来处理时钟钟差对导航的影响。其次,分析脉冲星系统偏差对导航的影响。时钟漂移造成的系统偏差与脉冲星方位误差造成的系统偏差,同时作为状态向量的增广分量。最后,本文采用无迹UKF 对导航信息进行处理。
1 量测模型
1.1 X射线脉冲星量测模型
脉冲星信号到达太阳系质心(sun system barycenter,SSB)的时间可以由脉冲计时模型预报得到。通过处理量测值也得到一个脉冲到达SSB的时间。通过时间转换模型外推可以获得该脉冲信号到达SSB处的时间[5-6]。再根据脉冲星的时间相位模型可以计算出脉冲真实达到SSB的时间[7]。外推的脉冲到达时间(time-of-arrival,TOA)与真实的到达时间之差反映了航天器的位置偏差和钟差。在航天器上测量的脉冲TOA可以转换到SSB处对应的TOA[8]:
[-rSC2+ (ni·rsc)2- 2b.rsc+ 2(ni·b)(ni·rsc)] (1)

1.2 方位偏差造成的系统偏差

(2)
式中,Bi是第i颗脉冲星造成的系统偏差。根据公式(1)与(2),Bi可表示为:

在地心惯性坐标系中公式(3)的第三项与第四项可以省略[2],因此,Bi可简化为:
(4)
在SSB惯性系统中,X射线脉冲星信号的时间相位模型为:
(5)
式中,t0为参考时间原点;f为脉冲星的辐射频率。则由上式可以获得脉冲信号φk到达SSB的时间为:
(6)


(7)

(8)
2 动力学模型
2.1 轨道动力学模型
选取地心惯性坐标系,导航系统的轨道动力学模型为:
(9)

ae=-μer/r3是地球的引力加速度,μe是地球的引力常数。
am=-μm(r-rm)/|r-rm|3+rm/|rm|3是月球的引力加速度,μm是月球的引力常数,rm是月球相对于地球的位置矢量。
as=-μs(r-rs)/|r-rs|3+rs/|rs|3是太阳的引力加速度,μs是太阳的引力常数,rs是太阳相对于地球的位置矢量。

公式(9)可以简写为:

(10)
式中,状态向量X=[r,v,B]T。B=[B1B2...Bm]T是第i颗脉冲星的方位误差造成的系统偏差,m为脉冲星的总个数。w(t)=[wr,wv,wB]T是状态过程噪声,将其假定为协方差为Q的零均值高斯白噪声[8]。
2.2 星载时钟钟差模型
星载时钟的同步可以通过估计相对于标准时间的时钟钟差、钟差漂移率和钟差漂移率的变化率获得,因此星载时钟性能可用白噪声驱动的三态多项式进行仿真,离散过程的模型和模型噪声方差[9-10]为:
(11)
Qck(τ)=E[wc(k)wc(k)T]=
(13)
式中,x1,x2,x3分别表示时钟钟差、钟差漂移率和钟差漂移率的变化率;τ为时间间隔;wc1,wc2,wc3为白噪声;q1,q2,q3为噪声的功率谱密度;Φc(τ)为状态转移矩阵。
2.3 钟差修正模型

(15)
式中,Φ为增广后的系统状态转移矩阵;Wk=[w(k)Twc1(k)wc2(k)wc3(k)]T为噪声项;O3×3与O6×3为零矩阵;Φk为式(10)经离散线性化得到的状态转移矩阵。
增广后的脉冲星导航量测方程为:
(17)
式中,i用来区分不同的脉冲星;w1为脉冲星观测的噪声项;H1为脉冲星导航的观测矩阵:
H1(k)=
(18)
3 仿真实验与分析
3.1 仿真条件
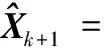
为了验证本文方法的有效性,将之分别与X射线脉冲星导航方法和X射线脉冲星与多普勒组合导航(X-ray Pulsar/DopplerIntegrated Navigation,XPDIN)方法的估计结果相比较。本文使用的脉冲星的参数信息[12]见表1;X射线背景辐射流量BX为0.005 ph/cm2/s;时间间隔设定为500 s;X射线探测器面积为1 m2;各脉冲的噪声协方差分别为109 m、334 m、1 866 m、325 m。
深空探测器的标称位置初值与标称速度初值分别设置为(1.270×105,7.124×104,3.090×104) km,(-17.012,25.573,11.411)km/s;星载时钟的噪声谱密度为q1=1.0×10-22s2/s,q2=2.0×10-32s2/s3,q3=6.0×10-45s2/s5;多普勒测速精度为0.01 m/s。
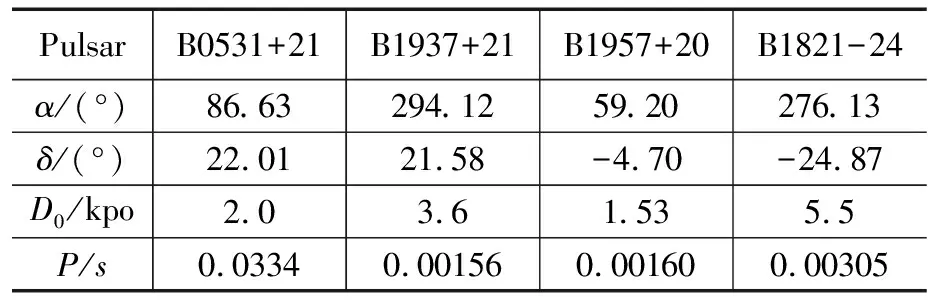
表1 脉冲星的参数
3.2 仿真结果及分析
图1给出了修正钟差和方位误差的X射线脉冲星导航和X射线脉冲星导航的对比结果。航天器长时间航行时,航天器的时钟会发生偏移,同时脉冲星的方位不可避免的存在偏差,时钟偏差与方位偏差都造成了系统偏差。修正钟差和方位误差的X射线脉冲星导航有效的抑制了时钟钟差和方位偏差对导航精度的影响。同X射线脉冲星导航相比,该方法有更好的导航精度和钟差修正能力。
图1 修正钟差和方位误差的X射脉冲星导航与X射线脉冲星导航对比

图2 修正钟差和方位误差的X射脉冲星导航与修正方位误差X射线脉冲星导航对比
图2给出了修正钟差和方位误差的X射线脉冲星导航和修正钟差X射线脉冲星导航的对比结果。两种导航方法都修正了时钟钟差对导航的影响,突出了脉冲星方位偏差对导航精度的影响。在钟差修正的情况下,修正钟差和方位误差的X射线脉冲星导航有效的抑制了脉冲星方位造成的系统偏差对导航精度影响。同修正钟差的X射线脉冲星导航,该导航方法提供了更好的导航精度。
4 总结
本文研究了时钟漂移及脉冲星方位误差对导航精度的影响,提出了一种修正钟差和脉冲星方位误差的导航方法。本文将时钟钟差与方位误差造成的系统偏差作为增广状态变量并使用多普勒差分量测,利用联邦UKF融合导航信息。仿真结果表明,该导航方法能够有效的抑制方位误差,提高星载时钟钟差,并提供更高的导航估计精度。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
幼儿园(2021年12期)2021-11-06
北京航空航天大学学报(2021年7期)2021-08-13
导航定位与授时(2020年5期)2020-09-23
导航定位学报(2018年3期)2018-09-03
北京航空航天大学学报(2018年1期)2018-04-20
儿童故事画报·自然探秘(2017年2期)2017-09-26
太空探索(2016年12期)2016-07-18
小学生时代·大嘴英语(2015年7期)2015-11-23
