
基于图像伺服的接触网绝缘子自动水冲洗车
2018-08-24 07:51国志
计算机测量与控制 2018年8期
,国志,, ,
(西南交通大学,成都 610000)
0 引言
接触网绝缘子是接触网带电体与接地体保持电气绝缘的重要设备,绝缘子会受到环境的影响,表面积污受潮后会导致绝缘性能下降,有放电、污闪发生的潜在危险,进而会影响牵引供电稳定和设备安全,破坏列车运行秩序。为了防止污闪事故的发生,使铁路行车能够高速有效的运作,铁路部门定期进行带电水冲绝缘子清污工作。
KJ系列绝缘子带电水冲洗车是目前铁路上不可替代的不断电水冲洗设备,其采用高压带电水冲洗技术[1-2]。其缺点是不能自动对绝缘子清污维护,目前绝缘子冲洗车是人工操作冲洗水炮进行绝缘子冲洗作业,使清洗水柱一直对准绝缘子。自动化绝缘子冲洗设备在铁路绝缘子维护领域内还处于急需状态,自动化绝缘子冲洗成为研究重点。
1 自动水冲洗及瞄准
为实现自动化冲洗,第一步是定位冲洗目标,需要一套机器视觉系统,可以自动捕获与瞄准系统来识别绝缘子方位并控制冲洗装置瞄准绝缘子,又可以称为捕获跟踪与瞄准系统。类似于靶场光电测量设备、天文观测设备、武器控制系统中,都配有光电捕获跟踪与瞄准装置,以便迅速发现并精确跟踪目标。在武器系统中,为了使激光瞄具能稳定照射在很远的固定目标,所以必须具备一个功能完善、精度极高的捕获跟踪与瞄准系统,以便使武器迅速捕获目标,并对其进行精密跟踪瞄准以便及时攻击。
铁路绝缘子自动水冲洗设备,代替传统的人工作业,将绝缘子水冲洗作业分为3个阶段:捕获,瞄准,跟踪,图1捕获跟踪与瞄准系统框图。捕获:在工作范围内,多种方式相互配合将CCD相机视场内的绝缘子进行识别,可探测出视场内绝缘子个数和粗略方位。瞄准:在水冲洗车进入工作范围内,使用图像伺服控制技术,瞄准待冲洗绝缘子,即通过调节水炮姿态使冲洗炮管对准绝缘子的几何中心后,开始对绝缘子进行冲洗,其关键技术是图像伺服的高精度。跟踪:载体运载冲洗装置在行进中,跟踪系统控制冲洗炮管持续对准冲洗目标进行冲洗作业。

图1 捕获跟踪与瞄准系统框图
在铁路平车带着冲洗装置行进,冲洗装置与绝缘子水平距离为10 m即表示进入冲洗装置的工作范围,自动冲洗系统识别绝缘子后,冲洗炮管需瞄准固定目标(绝缘子)。根据文献 [3]可对铁路绝缘子进行识别定位,但文献[3]并没有提出对冲洗装置瞄准绝缘子控制方法的研究。在自动水冲洗车作业中,冲洗水炮炮管自动瞄准绝缘子是自动冲洗的一个关键技术,也是跟踪冲洗绝缘子的基础。本文将机器视觉技术引入到绝缘子自动水冲洗中,可以设计图像伺服控制算法,使冲洗水炮可以瞄准绝缘子进行冲洗维护。
2 基于图像伺服控制策略
根据文献[4-6],视觉伺服是机器视觉的一个重要分支,利用视觉传感器得到图像计算后,经计算机计算出目标信息,再经计算后得到控制信息,可构造冲洗控制装置中的闭环控制,即视觉伺服(visual servoing)。视觉伺服技术常应用于各种自动化设备和机器人中,不同于机器视觉,视觉伺服则是以实现对机器人的控制为目的而进行图像的自动获取和分析。视觉伺服本质是利用机器视觉的原理,从直接得到的图像反馈信息中,快速进行图像处理,在尽量短的时间内给出反馈信息,构成机器人的闭环控制。
根据不同的标准,机器人视觉伺服系统可以被划分为不同的类型。按照摄像机的数目的不同,,可以分为单目视觉伺服系统、双目视觉伺服系统以及多目视觉伺服系统。按物理结构可将视觉伺服系统分为,眼在手型(Eye—in—hand Configuration)和眼固定型(Fixed in workspace)。视觉伺服系统的根据反馈分为基于位置的视觉伺服系统(PBVS,Position-Based Visual Servoing)和基于图像的视觉伺服系统(IBVS,Image-Based Visual Servoing)。图3是两种视觉伺服系统的结构框图的对比,可以看出两者的区别主要在于以下3个方面:首先,两种伺服系统的区别在于反馈信号,基于位置的视觉伺服,误差信号是在三维笛卡儿空间中定义的坐标,而基于图像的视觉伺服,误差信号直接用图像的平面坐标(非空间坐标)内特征点带入函数计算;其次, PBVS在三维内重建,误差信号和关节输入控制信号都是空间位姿 ,控制简单,IBVS虽不用三维重建,但是控制更复杂,需要通过计算雅可比矩阵来进行,且需要考虑其收敛;第三,摄像机的标定误差和机器人的运动学模型误差对PBVS的影响更大,PBVS没有对图像进行直接控制,相比IBVS更易使目标离开视场。
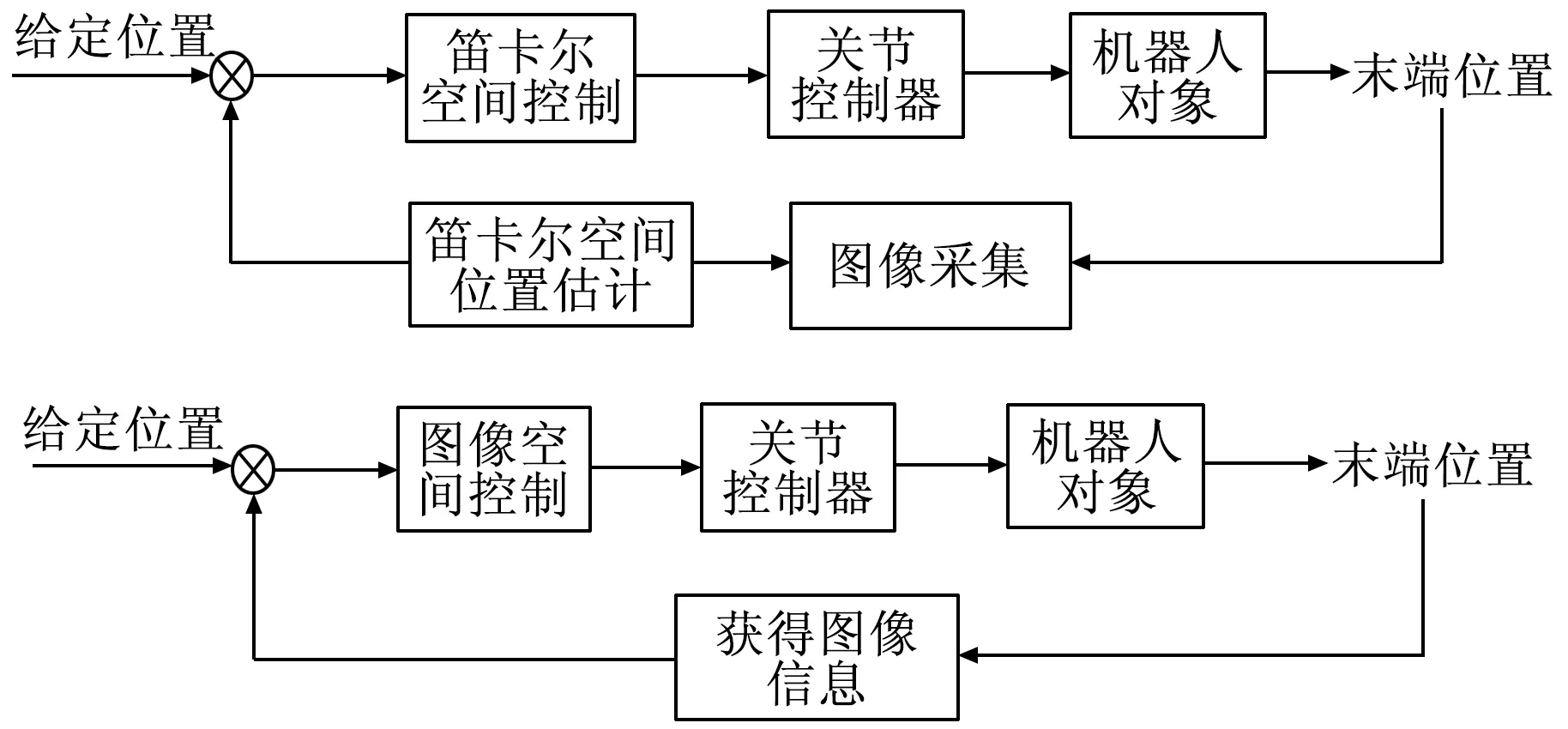
图2 基于位置的视觉伺服控制结构框图与于图像的视觉伺服控制结构框图对比
本论文从实时性和准确性方面考虑,选取IBVS控制策略,其优点是:1)不需要三维重建;2)标定误差和运动误差对其影响更小,但是要注重各雅可比矩阵。将IBVS中眼在手型(Eye-in-hand)应用于冲洗装置对绝缘子的瞄准,视觉伺服控制的目标是控制冲洗炮管(或摄像机)使待冲洗绝缘子的质心在图像平面上的投影始终在期望的位置上,即绝缘子在图像中质心位置与期望位置矢量误差最小。
IBVS具体控制策略设定为,根据图像识别捕获算法找出绝缘子在图像中的位置,再计算图像特征空间的变化率,同时将冲洗装置当前位置和位姿计算出,图像雅可比矩阵、装置雅可比矩阵及其伪逆矩阵求出。带入误差函数得到冲洗装置的位姿速度,只是在广义坐标中的速率,经过装置雅可比得到冲洗装置的控制角速度,最终实现对冲洗装置控制对绝缘子冲洗瞄准。图3为基于图像伺服控制策略流程图。

图3 基于图像伺服控制策略流程图
基于图像的控制策略的目的是使误差函数最小,定义误差函数为:
e(t)=f(i(t),a)-f*(t)
(1)
式中,e(t)为当前图像特征矢量和期望特征矢量的差值,i(t)为待冲洗绝缘子质心在图像中的坐标,是有冲洗装置与待冲洗绝缘子之间的一组参数,f*(t)表示绝缘子质心在图像平面中的期望特征矢量。这个期望的位置可以是图像平面上任意一个固定的位置,本文取图像平面的中心。f(t)为特征点计算函数,与系统本身参数有关,如摄像机固有的参数等。特征矢量f(i(t),a)∈Rm为m维矢量。

(2)
Jr∈Rm×p称为图像雅可比矩阵,描述了图像特征空间与冲洗装置位姿的时间的微分映射关系。图像雅可比矩阵这一概念1987 年由 Weiss et al.提出,又被称为为特征敏感矩(feature sensitivity matrix)、交互矩阵(interaction matrix)、B矩阵等。
(3)
当f*(t)为常值时,由式和即可得到摄像机速度和误差时间导数间的关系为:
(4)
按照李雅普诺夫方法设计控制律设计误差按照指数衰减,衰减因子是σ(σ>0)则:

(5)
可得:
(6)

(7)

(8)
式(8)逆解,得出冲洗装置的控制角速度。
(9)
3 雅可比矩阵
将式(8)代入式(2)得到:
(10)
根据IBVS控制策略,需将各雅可比矩阵及其伪逆矩阵求出。Jq为冲洗装置雅可比矩阵,表示冲洗装置末端在空间内广义速率与冲洗装置两个转角角速度之间的关系,Jr为图像雅可比矩阵,描述了图像特征空间的变化率与冲洗装置两个转角角速度之间的关系,J为复合雅可比矩阵,可直接表示图像特征空间的变化率与冲洗装置两个转角角速度之间的关系。摄像机固定在冲洗装置炮管末端一起运动,且摄像机坐标系和机器人末端坐标系重合。这样在机器人基坐标系下期望的摄像机广义运动速度和冲洗装置广义运动速度相同。则摄像机运动速度和冲洗装置运动速度之间的变化关系即为机器人的雅可比矩阵。
摄像机采集的数字图像在计算机内存储为数组,组中的每一个元素称为像素(pixel),像素值是图像点的灰度。图4为摄像机成像模型,在图上定义直角坐标系Ouv,(u,v)是以像素为单位的图像坐标系坐标,每一帧图像中的坐标(u,v)分别是该像素在数组中的列数和行数。Oxyz-w,Oxyz-c,Ouv分别为世界坐标系,摄像机坐标系,图像坐标系。用(x0,y0,z0)表示绝缘子中心在空间坐标系下的坐标, (xc,yc,zc)表示绝缘子在摄像机坐标系下的坐标,(u,v)表示绝缘子中心在成像平面上的图像坐标,是镜头的有效焦距。
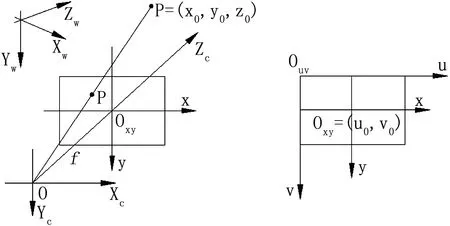
图4 摄像机成像模型
在手眼系统,摄像机安装在冲洗水炮炮管上,随冲洗装置运动而运动。若摄相机坐标系Oxyz-c相对基坐标系的线速度和角速度分别为T=[TxTyTz]T和w=[wxwywz]T。可得:

已知u、v为二维图像坐标系中坐标(pixel),有效焦点长度f(mm),目标深度信息z(mm)可求得图像雅可比矩阵为:
(11)
式(11)为单个静态特征点(二个坐标)图像雅可比矩阵的解析表达式。这一解析表达式是早期的基于图像的视觉伺服的基础。
冲洗装置两自由度水炮运动学模型及坐标系如图5所示。在水炮炮身回转支承的中心O点建立第0号坐标系(既参考坐标系),第 0号坐标系固联在水炮回转支承内圈上,其中z0轴和炮身旋转轴重合;在水炮炮身建立1号坐标系,固联在水炮炮管转动轴上,可随炮身与炮管转动,z1轴与炮管转动轴重合,x1轴垂直于z1轴和z0轴所确定的平面;在水炮炮管末端建立2号坐标系,轴和冲洗炮管轴重合,x2轴垂直于z1轴和z2轴所确定的平面,其余轴方向按右手法则确定。

图5 两自由度水炮运动学模型及坐标系
炮身与炮管两个自由度的转角分别为θ1和θ2,回转支承中心到炮管转轴的长度为r。令si=sinθi,ci=cosθi。由参考文献[7]中的雅可比矩阵的微分-矢量法,可得二自由度冲洗装置的雅可比矩阵为:
(12)
冲洗装置的雅可比矩阵Jq为6x2的矩阵,不存在逆阵,所以只能够造出其伪逆阵。雅可比的伪逆阵定义为:
(13)
(14)
将式(11)带入式(7)可以得到冲洗装置的位姿速度输入,再将求得的式(7)与式(14)代入式(9),可由图像中绝缘子的位置矢量最终得出冲洗装置的控制角速度,实现对冲洗装置控制对绝缘子冲洗瞄准。
4 Matlab仿真实验
以二自由度的绝缘子水冲洗装置为对象,基于MATLAB R2014b内Robotics Toolbox建立仿真模型,仿真中摄像机焦距设定,冲洗装置与绝缘子距离3 m,r=1 m,系统采样时间设为50 ms,延时时间设为120 ms,其中延时包括图像采集、处理等过程产生的时延。
图6为IBVS在Matlab/simulink内的模型,基于图像伺服的控制策略是使误差函数最小,即控制函数在初始特征点与理想位置的坐标差逐渐减小,稳态后特征点坐标趋于零。
从图7与图8可以看出,IBVS伺服过程中,冲洗装置和摄像机的速度呈衰减趋势,逐渐区域0°,表明趋近于稳定;摄像机的运动轨迹呈一条直线,但是图像特征点的运动轨迹为曲线。IBVS伺服过程中,所构造的控制函数可对摄像机的姿态进行有效控制,使所设定绝缘子能始终处于摄像机视野之内。

图6 基于图像视觉伺服控制的simulink模型

图7 IBVS伺服过程
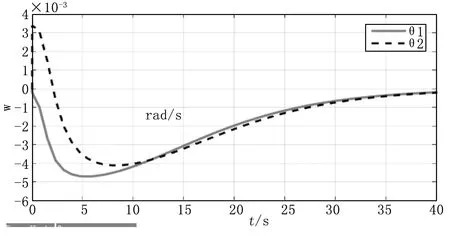
图8 两自由度冲洗装置转动角度

图9 4个特征点坐标差值变化
图9所示为冲洗水炮炮管和摄像机在IBVS过程中平面坐标差值变化,可以观察到4个特征点最终都趋近为0,不在变化。以上结果证明IBVS方法中误差函数收敛,满足控制理论的要求,可以对绝缘子进行定位后跟踪冲洗提供算法。
5 结束语
目前铁路绝缘子维护领域内还没有自动水冲洗设备,本文将机器人中前沿的视觉伺服引入到绝缘子水冲洗领域中。提出IBVS控制方法,并写出其设计过程,求出图像雅可比矩阵与冲洗装置雅可比矩阵及其伪逆矩阵,建立起图像与冲洗装置控制量之间的关系,实现图像求解后生成控制量对冲洗装置控制。并通过Matlab实验验证,本文提出的IBVS控制方法简单可靠,计算量小,能正确瞄准绝缘子冲洗,为后续的绝缘子实时跟踪冲洗提供基础,也可为工业自动化中图像伺服提供参考。
猜你喜欢
计算技术与自动化(2022年1期)2022-04-15
宁夏电力(2021年1期)2021-03-19
环球时报(2020-10-22)2020-10-22
火力与指挥控制(2019年3期)2019-04-23
电子制作(2018年17期)2018-09-28
广东造船(2017年3期)2017-07-18
办公自动化(2016年18期)2016-12-17
福建建筑(2016年10期)2016-12-17
办公自动化(2016年18期)2016-08-20
山东工业技术(2015年18期)2015-07-16
