基于最小二乘法的弹体参数辨识工程算法*
2018-08-28 04:04杨云刚赵军民刘钧圣王齐双
弹箭与制导学报 2018年4期
杨云刚,赵军民,刘钧圣,王 琨,王 刚,王齐双
(西安现代控制技术研究所,西安 710065)
0 引言
精确的导弹弹体参数是导弹总体方案设计与优化、飞行性能分析、控制系统设计及飞行试验方案制定的重要前提和基础。工程研制过程中,通常采用理论计算[1]、风洞试验[2]和发动机地面点火试验等方法获取导弹的气动参数和推力参数,但由于理论模型的差异、风洞洞壁干扰、发动机推力台测量误差等局限性,造成飞行试验的结果往往与理论值存在或大或小的差异[3-4]。此外,随导弹研制工作的进展,一般会对导弹结构、气动布局进行优化改进,必然带来弹体参数的改变,而频繁进行费用昂贵的风洞试验并不现实。针对这一问题,参数辨识算法应运而生并得到大力发展。
在参数辨识领域中,最小二乘法是一种得到最广泛应用的估计方法,可用于动态、静态、线性、非线性系统[5-7]。但在工程实践中,一方面,导弹通常经历大推力增速、小推力续航、无动力滑行等阶段,采用传统最小二乘法对整个飞行过程建立的系统辨识方程会出现严重病态,进而得出误差较大甚至错误的结果,对导弹总体设计与工程实践缺乏指导意义;另一方面,无论气动力线性模型还是非线性模型[8],均与导弹风洞试验的气动参数存在一定误差,引用参数辨识方法对气动力数学模型进行辨识并不具有直接的工程使用价值。
文中以某型红外图像制导空地导弹为研究背景,提出一种基于最小二乘法的弹体参数辨识工程算法,在发动机地面点火试验推力数据和导弹风洞试验气动数据基础上,设计了推力修正系数和阻力修正系数,并针对导弹发射增速段、续航飞行段和无动力滑行段分别建立最小二乘法弹体参数辨识模型。该方法能有效解决辨识方程病态问题,易于工程实现,已在导弹型号研制中得到成功应用。
1 弹体参数辨识工程算法建模
1.1 最小二乘法原理
设观测方程为:
y=Cλ+ε
(1)
式中:y为观测矢量;C为参数灵敏度系数矩阵;λ为待辨识参数;ε为测量噪声,并设测量噪声为等方差白噪声。
(2)
容易证明,最小二乘法的估计值是无偏的。
1.2 系统弹体参数辨识模型
导弹飞行过程一般由发射增速段、续航飞行段和无动力滑行段组成,可利用弹上惯导进行导弹飞行过载、速度、姿态角及姿态角速度的测量。导弹速度方案主要受发动机推力和气动阻力影响,其他因素影响较小,易于弹体参数辨识,因此选取导弹轴向过载为观测量,结合导弹飞行力学原理,系统观测方程为:
kpPicosαcosβ-kcxcxiqS=mgnx2
(3)

为解决信息矩阵病态问题,有学者提出贝叶斯法、岭估计法等有偏估计方法,但这些方法依赖于验前信息的准确性或受损失函数的合理性,但若验前信息不可信,反而导致参数辨识结果不正确。针对该问题,文中对导弹飞行过程划分为发射增速段、续航飞行段和无动力滑行段,各阶段分别建立弹体参数辨识模型,从而有效解决了信息矩阵病态问题,非常易于工程实现。
1.3 发射增速段参数辨识模型
发射增速段发动机推力远远大于气动力,因此将方程(3)简化为:
kpPicosαcosβ=mgnx2
(4)
选取Picosαcosβ为参数灵敏度系数矩阵,根据最小二乘法原理,发射增速段参数辨识模型为:
kp(i)=([Picosαcosβ]T[Picosαcosβ])-1·
[Picosαcosβ]Tmgnx2(i),kp(0)=kp0
kcx(i)=kcx(i-1),kcx(0)=kcx0,i=1,2,3,…
(5)
式中:kp0为发动机推力修正系数初值;kcx0为阻力修正系数初值。
1.4 续航飞行段参数辨识模型
一般续航飞行段发动机推力与气动阻力量值相当,因此以方程(3)为观测方程,参数灵敏度系数矩阵为:C1=[Picosαcosβ-cxiqS],根据最小二乘法原理,续航飞行段参数辨识模型为:
(6)
1.5 无动力滑行段参数辨识模型
无动力滑行段发动机推力为0,导弹速度主要受气动阻力影响,因此将方程(3)简化为:
-kcxcxiqS=mgnx2
(7)
选取-cxiqS为参数灵敏度系数矩阵,根据最小二乘法原理,无动力滑行段参数辨识模型为:
(8)
2 数字仿真及分析
2.1 试验数据预处理
飞行试验环境的复杂性、数据采集系统的非理想性等众多因素,不可避免地使飞行试验实测数据带有误差和噪声,这些误差可能导致参数辨识过程发散,甚至收敛到错误结果[9],因此在参数辨识之前,必须对飞行试验实测数据进行预处理,降低实测数据中的各种噪声和系统误差,以提高弹体参数辨识的准确度。
文中对飞行试验获得的实测数据进行5点平滑滤波处理。需要预处理的数据包括3个姿态角(俯仰角ϑ、偏航角ψ、滚转角γ)、弹体系3个方向过载(X向过载nx1、Y向过载ny1、Z向过载nz1)、发射系3个方向速度(Vx,Vy,Vz),处理方法为:
(9)
式中:x为原始测量数据;yo为处理后数据。
2.2 中间参数计算
根据关系式(10),由预处理后的Vx,Vy,Vz,计算可得弹道倾角θ和弹道偏角ψv;由预处理后的俯仰角ϑ、偏航角ψ、滚转角γ,经几何关系方程(11)解算,得到攻角α、侧滑角β和速度倾斜角γv;根据关系式(12),对预处理后的弹体系X向过载nx1、Y向过载ny1、Z向过载nz1进行坐标变换,得到弹道系X向过载nx2、Y向过载ny2、Z向过载nz2。
(10)
(11)
(12)
2.3 流程设计
文中弹体参数辨识工程算法流程设计如图1所示。

图1 弹体参数辨识工程算法流程设计
2.4 仿真分析
选取某次飞行试验的实测数据为观测量,以发动机地面点火试验推力数据和导弹风洞试验气动数据为参考,采用文中基于最小二乘法的弹体参数辨识工程算法进行发动机推力修正系数和阻力修正系数辨识,仿真输入见表1,弹体参数辨识结果见表2。

表1 仿真输入

表2 弹体参数辨识结果

图2 速度曲线对比
由表2结果可知,导弹飞行各阶段推力修正系数、阻力修正系数收敛值一致。进一步,为验证弹体参数辨识结果的正确性,利用表2辨识结果对导弹基准弹体参数修正,进行六自由度弹道仿真计算,仿真结果见图2~图6。对比仿真结果和导弹飞行试验数据,导弹飞行各阶段速度、姿态曲线基本重合,表明弹体参数辨识结果与实际相符,即文中弹体参数辨识算法合理有效。

图3 发射增速段速度曲线对比
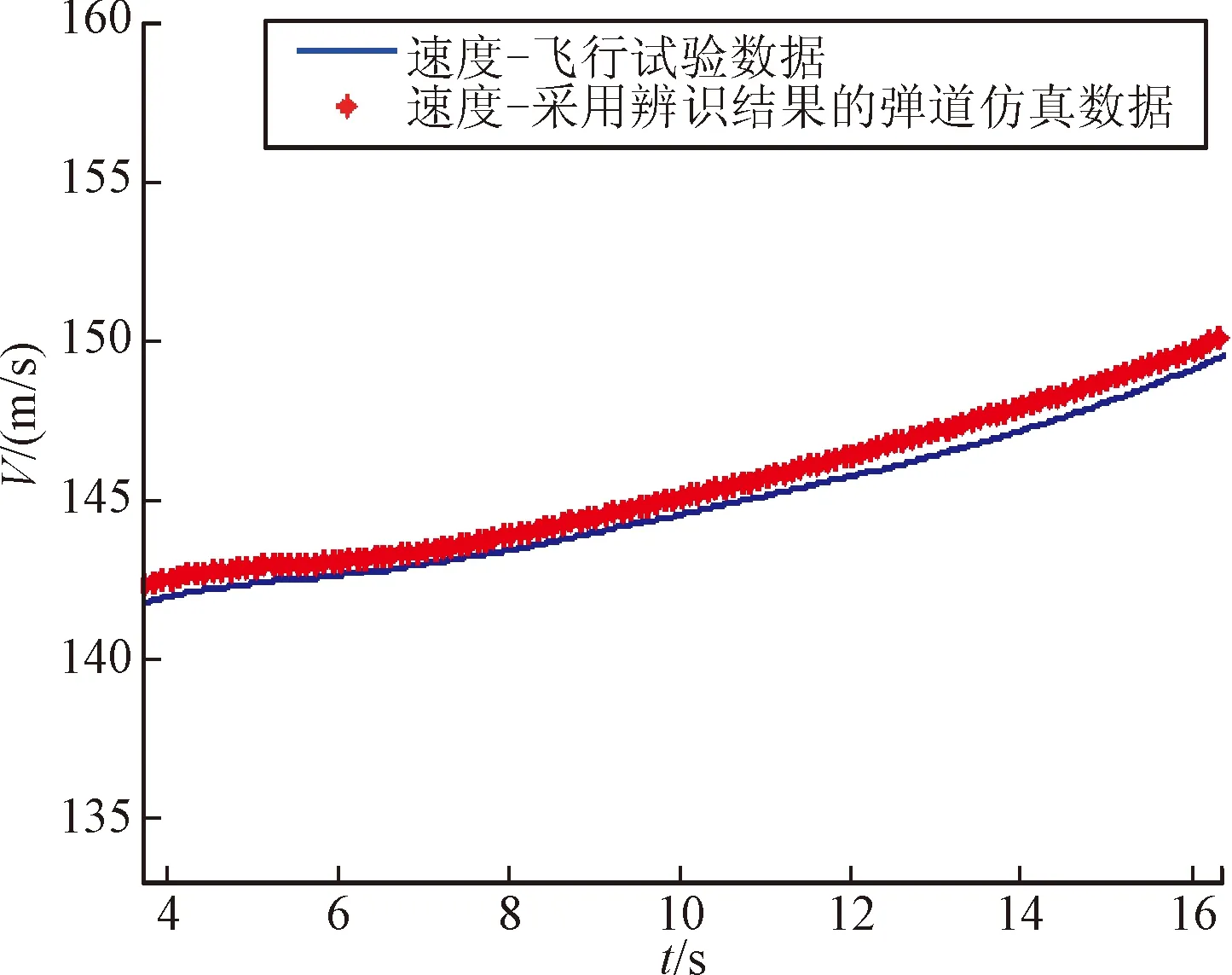
图4 续航飞行段速度曲线对比

图5 无动力滑行段速度曲线对比
3 结论
文中以导弹轴向过载为观测量,以发动机推力修正系数和阻力修正系数为目标,基于最小二乘法对导弹发射增速段、续航飞行段和无动力滑行段分别建立了弹体参数辨识模型,有效解决了传统最小二乘法辨识方程病态问题,仿真结果验证了该算法的有效性和准确性。文中提出的弹体参数辨识工程算法以发动机地面点火试验推力数据和导弹风洞试验气动数据为基础,避免了气动力建模方法带来的辨识误差,非常适用于导弹实际工程研制,已在某型红外图像制导空地导弹项目中得到成功应用。特别的,当导弹飞行过程不包含续航飞行段或无动力滑行段时,该算法依然有效。
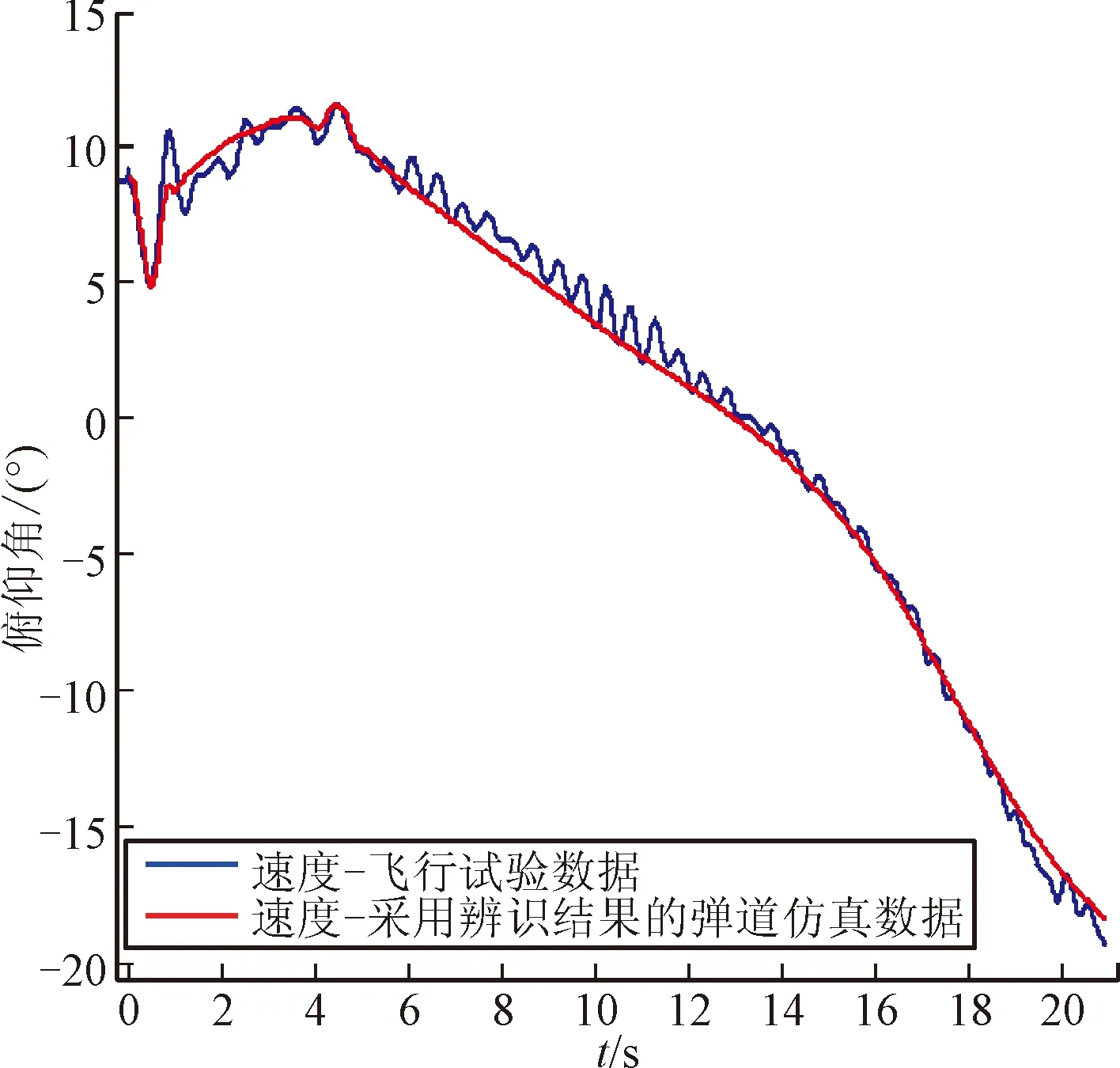
图6 俯仰角曲线对比
猜你喜欢
天然气与石油(2022年4期)2022-09-21
车主之友(2022年4期)2022-08-27
兵器装备工程学报(2022年7期)2022-08-10
兵器装备工程学报(2022年4期)2022-05-09
爆炸与冲击(2022年2期)2022-03-17
兵工学报(2021年6期)2021-07-29
北京航空航天大学学报(2021年6期)2021-07-20
当代陕西(2019年15期)2019-09-02
环境与生活(2018年5期)2018-09-10
劳动保护(2018年5期)2018-06-05