
模糊自适应PID算法在智能车中的应用研究
2018-09-10 14:47陈冠希
河南科技 2018年4期
陈冠希


摘 要:本文首先分析智能控制技术,然后阐述各个控制方法的原理,最后在MATLAB的Simulink模块中进行了模型的建立和仿真,并对传统PID模型和模糊自适应PID模型的仿真分析图进行分析,从而得出模糊自适应PID控制效果远远好于传统PID控制的结论。
关键词:模糊控制;PID控制;智能车;仿真
中图分类号:TP273.5 文献标识码:A 文章编号:1003-5168(2018)04-0031-02
Research on the Application of Fuzzy Adaptive
PID Algorithm in Intelligent Vehicle
CHEN Guanxi
(Guizhou Polytechnic Institute, Guiyang Guizhou 550003)
Abstract: This paper first analyzed the intelligent control technology, and then described the principle of the control method, finally had carried on the establishment of model and Simulation in the Simulink module of MATLAB, and the traditional PID model and adaptive fuzzy PID model simulation analysis chart analysis, thus obtained the conclusion that fuzzy adaptive PID control was better than the traditional PID control.
Keywords: fuzzy control;PID control;intelligent vehicle;simulation
智能車是当今讨论的较为火爆的话题之一。目前,在智能车的控制方面大多使用的是模糊控制和传统的PID控制。本文主要针对在智能车发展过程中几种控制方法进行分析与研究,并提出较为先进的模糊自适应PID控制方法,并对其进行验证。
1 智能控制技术
随着互联网的快速普及和人工智能的发展,自动控制的概念已经为人们所熟知,并以非常快的速度应用于电视、洗衣机、电冰箱等家用电器中。随着工业技术发展进入4.0阶段,人们对自动控制技术的要求不断提高,其理论也由传统的控制理论发展到当前的现代控制技术,通过建立精确的数学模型进而实现有效的控制。但一线技术人员都知道,绝大多数工业模型由于其不确定性、时变性等,很难建立精确的数学模型,甚至连近似模型的建立都很难。为了解决这些问题,智能控制技术应运而生。智能控制技术不仅是几门学科的交叉,更是多种科学方法的运用,是一门学习、运用起来较难的学科,但其运用范围越来越广,其重要方法有经典控制方法、自适应方法、模糊控制和PID控制等,其发展的主要方向是将人工智能引入智能控制技术行业。现在对几种控制方法进行简要分析。
1.1 模糊控制
模糊控制是通过模仿人的思维而进行逻辑推理、模糊控制的智能控制技术方法,其以模糊集理论、模糊语言变量和模糊控制逻辑推理为基础。由于模糊控制的可操作性强、具有实际应用价值,因而,被广泛应用于工业领域。20世纪60年代,美国加利福尼亚大学的一位教授提出了模糊数学的概念,随着模糊数学的发展,其最终发展成为模糊控制理论。但是,当时的控制模型较为单一,应用范围较为狭窄,主要用在蒸汽机上,但随着工业技术的发展,模糊控制理论的应用范围越来越广,逐渐被用于电气行业、交通运输行业及工业生产等。
1.2 PID控制
PID控制方法是智能控制技术中一项较为重要的控制方法,PID即是比例、积分、微分三者英文的缩写。PID控制方法发展历史较长,已经拥有标准的控制器。目前,PID控制算法已被广泛应用于智能汽车、智能仪表、智能调节器等方面,利用PID控制器可以实现对力、温度、电流等的控制。当不知道被控对象的性质参数或者得到的被控对象的各项参数不完整时,将很难创建数学模型或者近似创建数学模型,这时可利用PID控制方法解决此类问题。
1.3 自适应控制
自适应控制是一种根据控制器在算法控制律的参数改变过程中获得一套自适应参数的鲁棒控制。工业模型的被控对象与内环控制经常会出现参数不匹配的问题,其模型的准确性也很难确定,但其内部的控制理论一般是固定不变的,一旦数学模型与内在控制不匹配或者匹配不准确时,自适应控制技术将根据外在被控对象参数的变化而不断调节内环控制,以达到控制的最优化。
2 控制方法的原理
2.1 模糊控制
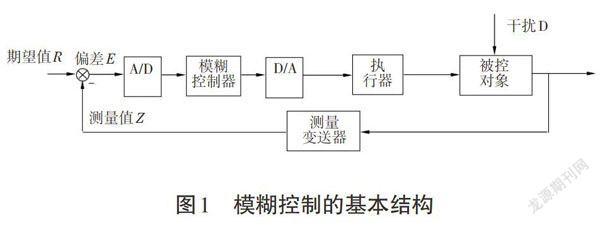
模糊控制系统的基本结构如图1所示,具体包括被控对象(基本上很难建模)、模糊控制器、输入/输出接口(模糊化与反模糊化环节)、执行结构及测量变送器。模糊控制系统的原理为,首先计算测量值与期望值的差即计算偏差信号E,将E模糊化后变成模糊量,用相应模糊语言表示,将E和推理规则进行合成,得到输出控制量,将模糊控制量转化为精确量,并传送给执行机构[1]。
2.2 PID控制原理
PID控制不同于模糊控制,其因具有经典的控制理论规律从而实现对控制对象的调节,即比例调节、积分调节和微分调节,其作用是调整系统偏差、提高系统稳态和抗干扰能力及克服系统惯性滞后。单通道的PID控制原理图如图2所示。这是一个闭环反馈控制,其输入值为r(t),实际输出值为c(t),系统的控制偏差为e(t),即系统输入值与系统实际输出值之差。比例、积分、微分分别是P、I、D。u(t)是t时刻PID控制器的实际输出值。上述参数会随着系统的不同及控制要求的变化而发生变化。PID控制的结构极其简单,但控制效果良好。
3 模糊自适应PID模型的建立与仿真
3.1 模糊自适应PID控制器设计
模糊自适应PID算法模型是当前较为先进的控制技术之一,应用也较为广泛,其可以根据智能车的模型定义不同的系统模型,从而使智能车获得高精度、稳定的效果。模糊自适应PID控制器设计如图3所示,模糊控制集成为模糊推理,PID控制器即发展为PID调节器,共同控制着对象,其以偏差和偏差变化率为输入,可以满足不同情况下的参数要求,从而获得不同智能车模型的效果[2]。
3.2 模糊自适应PID控制Simulink模型建立
本文通过对比仿真的方式验证模糊自适应PID控制智能车的效果比传统的PID控制效果好。通过MATLAB中的Simulink模块建立传统PID仿真模型和模糊自适应PID控制模型,再分别进行仿真实验,获取实验曲线,并对曲线进行分析。Simulink模块是非常具有特色的仿真模块,其被广泛应用于工业技术领域,在智能车的设计和应用仿真中具有重要作用。在Simulink工作界面中,用户可以使用鼠标对Simulink模块库中的元器件进行拖选,以实现对各个模型的使用,各个模块之间使用具有流向的连线连接,很容易实现对电路、智能车的模型建立,并且可以实现一键仿真,出图,非常适合初学者入门使用。
4 结语
本文研究了智能车中模糊控制、传统PID控制以及自适应控制的发展现状及应用,并进一步分析模糊控制、传统PID控制的基本原理,随后提出模糊自适应PID控制的方法,并在前人研究的基础上进一步对模糊自适应PID算法进行设计。
参考文献:
[1]侯勇严,孙瑜,郭文强.一种自适应模糊PID控制器的仿真研究[J].陕西科技大学学报,2004(2):48-52.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年3期)2022-02-23
神州·中旬刊(2017年1期)2017-06-28
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
