
基于MSP430单片机的风动力寻迹小车设计
2018-09-10 16:41朱文明李辉
河南科技 2018年4期
朱文明 李辉
摘 要:该实验设计制作的是基于MSP430F149单片机的智能循迹小车。该设计由红外寻迹传感器、MSP430单片机和6612电机驱动电路等组成。该控制技术目前已被用于智能停车场盘、无人仓库运货和服务型机器人等领域。
关键词:智能循迹;MSP430F149单片機;红外寻迹传感器
中图分类号:TP242.6 文献标识码:A 文章编号:1003-5168(2018)04-0036-02
Design of Wind Power Tracking Trolley Based on MSP430 MCU
ZHU Wenming LI hui
(Department of Electrical Engineering, Shaoyang University,Shaoyang Hunan 422000)
Abstract: The experimental design of intelligent tracking car based on MSP430F149 MCU. The design is composed of an infrared trace sensor, a single chip microcomputer MSP430 and a 6612 motor drive circuit. The control technology has been used in the field of intelligent parking lot, unmanned warehouse delivery, service robot and so on.
Keywords: intelligent tracking;MSP430F149 MCU;photoelectric sensor
智能汽车技术主要包含以下三重功能,即智能感知提前报警系统、车辆动力系统和全自动操作系统。上一层技术是下一层技术的基础。
1 方案设计与选择
1.1 方案一:采用STC51系列的单片机为MCU
STC89C51系列单片机的价格实惠,使用范围较广。若使用较贵的单片机,尽管性能较好,但达不到该方案的设计要求,且使该设计成本增加。但是,价格便宜的STC89C51单片机功能有限,且使用端口较少,自身没有可调用的系统,数据处理较慢。这些缺点使TC89C51在该设计中不能被采用[1]。
1.2 方案二:采用MSP430系列的单片机为MCU
MSP430的I/O口的特点:①该单片机是一种16位超低功耗的混合信号处理器,具有低功耗且速度快、汇编语言用起来很灵活、寻址方式很多、指令很少、容易上手等优势;②该单片机片上有非易失存储器、RAM和16位的外设JTAG调试逻辑,用户在使用时,能够实现在线调试;③该单片机的数据能以2Byte和1Byte的方式寻址,使得寻址空间到达1MB;④MSP430具有典型的4种时钟,分别是LFXT1CLK、XT2CLK、DCOCLK和VLOCLK[2]。
通过分析,本文选择MSP430单片机作为该设计的数据处理器MCU。
2 硬件电路的设计
2.1 系统硬件设计框图
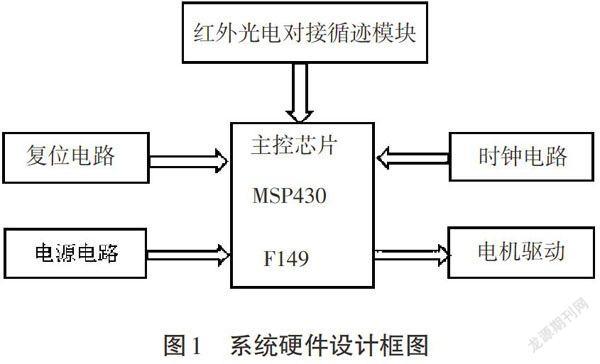
该设计的系统硬件是由MSP430单片机的最小系统、红外循迹传感器模块、电机驱动TB6612FNG模块、12V供电电源、12V转5V可调稳压电路和电机以及自主设计的亚克力板车体构成。
该设计的整体硬件电路分为以下4部分:①黑白线检测红外循迹传感器模块的灵敏度和工作条件;②供电电路的12V转5V可调稳压电路的可靠性和稳定性;③控制及驱动TB6612FNG模块的抗过流和最大电压大小的测试。
MSP430单片机的MCU主控制单元是小车的核心部分,该部分需要完成的任务有:信号获取、信号处理、信号反馈启动与停止的小车、控制电机转速等。系统硬件设计框图见图1。
2.2 MSP430单片机介绍
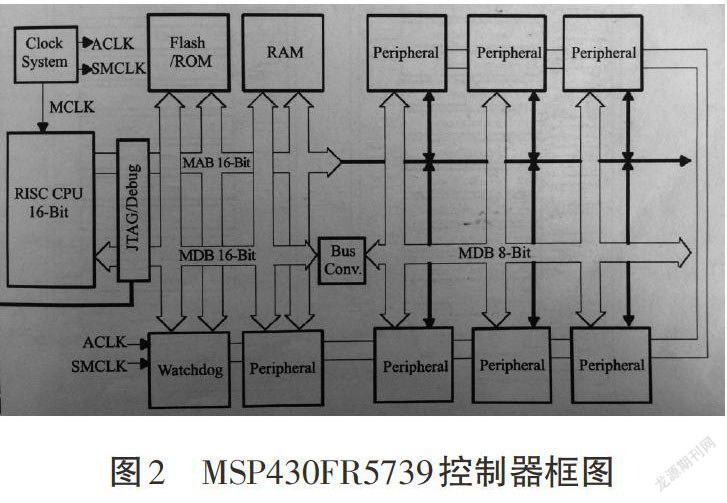
MSP430FR5739控制器框图如图2所示,其使用的是铁电存储器的微处理器。铁电存储器可以提高MSP430的运行速度和降低其功耗,相对于Flash更加强大,且延长了该单片机的使用寿命。
在MSP430上采用了运行速度较高的8MHz的CPU处理器、16KB的FRAM和1KB的SRAM等。
3 软件设计
该设计的软件部分,采用了MSP430中断系统。MSP430中断分为3种:系统复位、非屏蔽中断和可屏蔽中断。需要注意的是,在使用系统复位时,该中断需要指向最高地址OXFFFE。而非屏蔽中断和可屏蔽中断时,通过SR寄存器的GIE来区分,屏蔽中断不受GIE的控制,具有独立的中断使能;可屏蔽中断除了受本身的中断使能控制,还接受GIE控制。
软件设计的主程序部分为:
int main(void)
{
u8 t=0,report=1;
u8 key;
float pitch,roll,yaw;
short aacx,aacy,aacz;
short gyrox,gyroy,gyroz;
short temp;
Stm32_Clock_Init(9);
uart_init(72,500000);
delay_init(72);
usmart_dev.init(72);
LED_Init();
KEY_Init();
LCD_Init();
MPU_Init();
POINT_COLOR=RED;
LCD_ShowString(30,50,200,16,16,"WarShip STM32");
LCD_ShowString(30,70,200,16,16,"MPU6050 TEST");
LCD_ShowString(30,90,200,16,16,"ATOM@ALIENTEK");
LCD_ShowString(30,110,200,16,16,"2015/1/17");
}
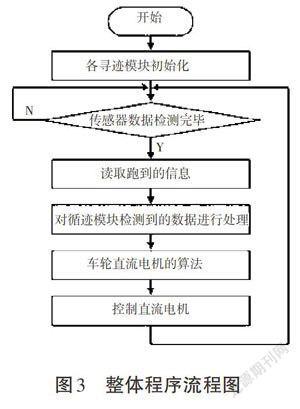
图3为本次设计的整体程序流程图,程序对系统的运行状态具有较大作用,所以一个可靠的编程是十分重要的。
4 结论
智能设备在现代社会的应用越来越广泛,而作为智能机器人中的一员,智能循迹小车设计与制作,主要是推广智能设备的应用和提高人们对智能设备的兴趣,使智能设备能应用到航空航天中。所以,本次设计根据目前国内外形势,采用MSP430单片机设计一款智能循迹小车,该控制技术目前正在尝试运用于无人驾驶机动车、无人生产工场、存储房和服务型机器人等多个范畴。
参考文献:
[1]尹杰,杨宗帅,聂海,等.基于红外反射式智能循迹遥控小车系统设计[J].电子设计工程,2013(23):178-180.
[2]洪利,章杨.MSP430单片机原理与应用实例详解[M].北京:北京航空航天出版社,2010.
猜你喜欢
好日子(2022年3期)2022-06-01
中小企业管理与科技·上旬刊(2021年10期)2021-09-22
意林·少年版(2020年23期)2020-01-15
东坡赤壁诗词(2019年5期)2019-11-14
中老年健康(2017年8期)2017-12-16
时代英语·高二(2017年4期)2017-08-11
电脑知识与技术(2017年5期)2017-04-08
妇女(2017年1期)2017-01-17
电脑知识与技术(2016年17期)2016-07-23
无线互联科技(2015年6期)2016-03-05
