
交叉口车辆跟驰换道模型构建及仿真
2018-09-14 08:47魏允晗
交通运输研究 2018年3期
魏允晗,韩 印
(上海理工大学 管理学院,上海 200093)
0 引言
车辆跟驰与换道行为是微观交通流中重要的两大驾驶行为,同时也是交通流理论中必不可少的组成部分[1]。跟驰模型主要讨论同一车道上车辆间的相互影响,而换道模型主要研究多个车道车辆的行驶状态[2],两种模型分别从道路纵向与横向两个角度讨论车辆间的相互影响。车辆的换道行为必然会涉及车辆跟驰行为[3]。
在交通流理论发展过程中,针对跟驰行为的研究已有很多。目前应用较多的跟驰模型有优化速度模型(Optimal Velocity Model,简称OV模型)[4]、灰色预测模型(Grey Model,简称GM模型)和全速差跟驰模型(Full Velocity Difference Model,简称FVD模型)[5]。此外还有元胞自动机跟驰模型,它主要考虑速度、车头间距、相对速度差等因素。
相比之下,针对换道行为的研究要少一些,这主要因为频繁的换道行为会对交通道路安全产生负面影响,而这种负面影响相对复杂,相关研究很难进行。此外,城市交叉口作为城市交通瓶颈节点,在交通系统中扮演着重要的角色。交叉口的通行能力和交通状况给城市交通带来的影响是巨大的,车辆换道对于交通安全的负面影响在交叉口路段会进一步放大。
鉴于换道行为对交通安全和交通拥堵问题的影响不容忽视,近年来许多学者针对换道行为展开了研究。换道行为的研究目前主要分为车辆换道决策行为(Lane Changing Decision-Making Process,简称LCD)[6]和车辆换道行为对周围环境的影响(Lane Changing′s Impact on Surrounding Traffic,简称LCI)[7]。在车辆换道决策行为研究领域,目前应用比较多的有Gipps′模型[8]和MITSIM模型[9]。这两个模型有相似之处,都总结了驾驶员在城市道路上的行驶状态,通过研究车辆决策过程与行驶可能性使得换道过程变得更加具体。Gipps′模型在现有研究中,常常会结合一些例如CORSIM的微观仿真模型应用,从而更好地对司机换道决策行为进行分析,将社会环境与跟驰模型相结合,研究城市道路车辆换道行为[10]。除此之外,还有元胞换道模型[11]。有关车辆换道行为对周围环境的影响的研究主要聚焦于车辆换道行为,由于受驾驶员反应特性、判断能力、交通环境中车辆排队长度等多种因素的影响[12],具有一定的随机性,车辆换道对周围车辆运行环境也会产生影响。这种随机性决定了跟驰换道行为具有复杂性[13]。在交叉口路段,这种复杂性还体现在车辆在进口道停车之前,其车道选择判断行为是实时变化的[14]。
近年来,越来越多的学者将跟驰行为和车道选择行为相结合,研究二者间的相互影响。这些研究主要分为两个部分,其一是针对车辆运行过程的讨论,将换道跟驰分为两个部分,讨论在自由换道情况下跟驰与换道行为的结合情况[15];其二是对车道数进行分类,讨论涉及到两个车道的交通流变化情况[16]。在此基础上,学者还针对连续交叉口,研究连续路段之间车辆换道行为的相互影响[17]。
本文将基于FDV跟驰模型与换道模型,结合城市交叉口路段,对跟驰换道过程中阶段划分不足的分析进行补充,综合考虑换道研究的两大方面,既考虑换道模型中车辆决策过程,又探讨车辆对周围环境的影响,重点研究影响车辆换道的因素。在模型中,将引入行驶过程中驾驶人员的期望值,增加新的车型影响因素和更符合实际的换道概率模型,以便更好地将跟驰与换道相结合,分析交叉口路段自由换道行为各影响因素之间的关系。
1 车辆跟驰与换道间的关系
在一般换道模型中,车辆是否换道取决于与前车的速度差以及车头间距,当条件符合安全换道距离要求时,通过判断是否能达到可以接受的最大加减速度来完成换道行为,其目的在于缩小与前车差距,从而更快速地跟车行驶。而对于交叉口路段,车辆的目的是更快地进入进口道,从而高效地通过交叉口路段。此时,驾驶员的换道判断不仅仅依赖于前方车辆,还与到交叉口的距离、交叉口排队长度、交叉口标志标线布设等外在环境因素有关。每个驾驶员会结合自我感知以及外部实际情况来调整车辆运行状态。车辆从驶入交叉口路段到在进口道停车要经过3个阶段:原车道跟驰、换道行为、目标车道跟驰行为,如图1所示。

图1 车辆换道跟驰过程示意图
(1)原车道跟驰
目标车辆(如图1所示i车)处于原车道,车辆的加速度由本车道前方车辆(如图1所示BE车)决定。此时,车辆状态与普通路段车辆在行驶过程中的跟驰行为相同,驾驶员根据与前方车辆的速度差以及车头间距来调整行驶状态。
(2)换道行为
驾驶员在本车道准备换道前的跟驰过程中,首先会根据本车与交叉口的距离以及交叉口进口道车流量的大小进行判断。这时,驾驶人员的注意力不仅在本车道前车(如图1所示BE车),同时还关注相邻车道前车(如图1所示TBE车)状态。目标车辆在综合评估原车道与目标车道的通行效益后,结合两个车道前方车辆速度、车头间距、前方车辆大车比例、距离交叉口距离等因素,做出换道决策。
一旦做出换道决策,车辆便进行换道,此时换道车辆同时受两个车道前车(如图1所示BE车、TBE车)的影响,并对两个车道后方车辆(如图1所示AF车、TAF车)产生影响。换道车辆一方面要根据前方车辆调整车头转向、车辆换道速度和加速度;另一方面,要通过后视镜观察后方车辆,注意后方车辆的安全,在保证后方两车道车辆均安全的情况下完成换道。
(3)目标车道跟驰行为
这是换道行为的第3阶段。换道车辆完成换道进入目标车道(如图1所示i′车)后,观察目标车道前车状态,不断调整车辆车头角度、角速度和速度等车辆状态,以进行新一轮的跟驰行为。在车辆跟驰过程中,根据前车不断调整状态,实时判断周围道路环境,以便再次做出换道决策。
2 交叉口车辆跟驰换道模型
在对车辆在交叉口的行驶状况进行分析之后,根据运行状态的3个阶段,构建车辆跟驰换道模型。
2.1 跟驰模型
以往研究发现,车辆跟驰行为的核心为与前车速度差以及与前车车头间距,其主要代表模型为全速差(FVD)模型。本文在最开始的原车道跟驰阶段也采用该模型,其中考虑正负速度差对于车辆跟驰的影响。由该模型可知,第i辆车在t时刻的加速度ai(t)为:

式(1)中:Δxi(t)=xi(t)-xi-1(t)为第i辆车在t时刻与前车的车头间距(m);vi(t)为第i辆车在t时刻的速度(m/s);Δvi(t)=vi(t)-vi-1(t)为第i辆车在t时刻与前车的速度差(m/s);κ,λ为模型待定系数;V(Δxi(t))为优化速度函数,且:

式(2)中:lc为车辆长度(m);V1,V2,C1,C2为待定系数。
需要注意的是,在跟驰模型中,当车辆在绿灯时间内不能通过交叉口时,就意味着车辆在这一轮绿灯时长内不可能进入交叉口出口道以便通过交叉口路段。此时尽管车辆前方没有跟驰车辆,其还是会在停车线前采取停车行为并等待下一轮绿灯放行,这时进口道最前方车辆将停车线视为跟驰前车进行制动。对于跟驰模型,各参数采用1998年由实测数据优化所得识别值[18],如表1所示。

表1 跟驰模型参数取值
2.2 车辆换道判断模型
当车辆进入交叉口一定范围内,驾驶员会根据周围环境来判断是否做出换道决策。本文主要分析驾驶员换道决策与车头间距、交叉口车辆排队长度、前方车辆类型和速度差4个要素之间的关系。另外,换道行为也与交叉口标线设置、道路特征和道路环境特征等有关,但在此不考虑。Logit概率模型作为离散函数,被广泛用于离散事件概率的预测。车辆换道决策概率是驾驶员个体决策概率模型,为离散事件,故车辆临近交叉口换道概率使用Logit模型进行预测,即:



图2 车辆换道过程示意图
3 参数标定与模型仿真
3.1 参数标定
现结合2018年4月上海市军工路典型的道路交叉口,对其前150m车辆运行情况进行调查,拍摄100辆直行换道车辆的换道位置和换道行为,并利用所得数据对换道概率Logit模型参数进行标定,结果如表2所示。

表2 换道概率模型参数取值
3.2 换道车辆速度变化
为了分析交叉口路段车辆跟驰换道行为,利用Matlab对所建模型进行仿真模拟。本文建立了距离停车线长300m、单车道宽3.5m、道路限速为16.66m/s的双直行车道的道路场景。其中,普通小汽车长度为5m、大型车辆长度为8m。开始时,场景中的车辆位置随机分布,绿灯时长为40s。选取其中一辆换道车辆,对其换道过程中的本车道前车、目标车道前车、换道速度变化情况进行分析,如图3所示。
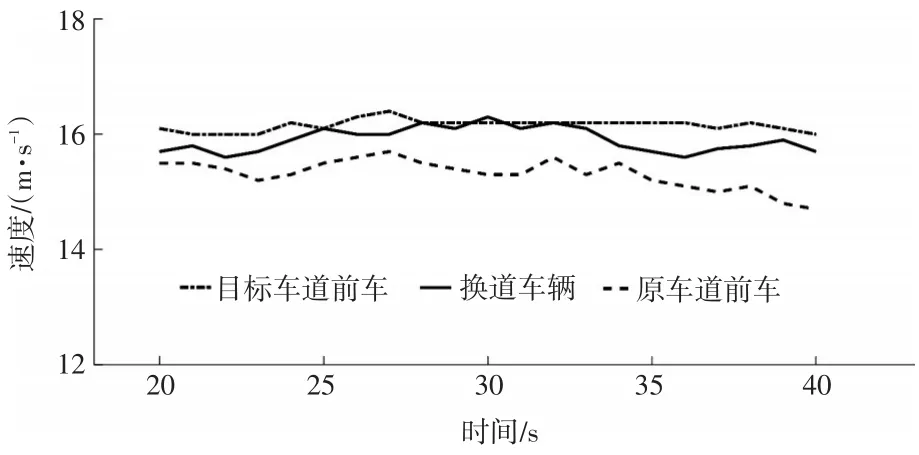
图3 换道车辆与前车速度关系图
由图3可以看出,车辆在进行换道时,速度是波动变化的,且目标车道前车和原车道前车均对换道车辆产生影响。在最初做出换道决策时,换道车辆受原车道前车影响较大,速度波动较大。这主要因为换道车辆仍对原车道前车进行跟驰,驾驶员会根据前车状态不断调整速度,寻求适合安全行驶的方式进行换道,所以会在换道初期出现多次速度波动。当原车道前车速度增加时,换道车辆会得到更为有利的换道条件,车辆选择增加车速、增大车头角度等驾驶行为,从而更高效地换到目标车道。换道车辆在偏移至目标车道后,会随目标车道前车速度调整自身速度,此时换道车辆速度变化受目标车道前车影响较大,驾驶员会降低速度从而更好地进行新车道的跟驰行为,更快地融入目标车道车队。换道车辆速度整体呈现先增加后减小的趋势,这与之前实际调研结果相符。以下为换道车辆3阶段的状态变化。
(1)原车道跟驰
在原车道跟驰行为中,车辆遵循一般跟驰模型规律,主要依赖于本车道前车的运行状态,在前车出现大车、前车速度缓慢等未达到驾驶员期望行驶环境的情况下,车辆可能进行换道。
(2)换道行为
车辆不断观察本车道与相邻目标车道车流状况,期间不断加减速,一方面注意与本车道前车的速度差与车头间距,保持安全行驶;另一方面观察目标车道是否有换道进入车道的机会,以及目标车道前车状态是否利于驾驶员本身达到更理想的行驶状态。当各项条件都符合后,车辆进行换道。在此过程中,车辆通过适当车头偏角,根据换道空隙选择加速或者减速,使车辆前端进入目标车道。
(3)目标车道跟驰行为
车辆车身整体汇入目标车道后,车速只受目标车道前车状态的影响,并开始新一轮的跟驰行为,车速变化趋于平缓。
3.3 换道概率影响因素分析
车辆换道概率分析主要研究车辆在什么情况下会采取换道行为,以及各影响因素对于车辆换道概率的影响大小。对于距离交叉口停车线100m和200m范围两种情况,分别分析前方大型车辆比例以及车流量在两个车道分布不同对于车辆换道概率大小的影响,如图4、图5所示。

图5 车辆换道概率(距离交叉口停车线200m范围内)
如图5所示,当前方大型车辆比例为40%且目标车道车流量占所有车流量的70%时,车辆换道概率为0.52;当前方车辆大型车辆比例为60%且目标车道车流量占所有车流量的70%时,车辆换道概率为0.55。从横向比较可以看出,相同道路环境下,前方大型车辆的比例越高,车辆换道概率越大,大型车辆比例上升20%,车辆换道概率就上升0.03。这主要因为大型车辆体大、身长、行驶速度较为缓慢,驾驶员在驾驶过程中容易存在驾驶视角死角,不容易观察到车辆旁边小型车辆等,从而导致跟驰大型车辆危险性较高。因而,小汽车驾驶人员在行驶过程中,主观意愿会选择大型车辆较少、较为安全的车道行驶,提高车辆行驶安全系数,同时达到更快通过交叉口的目的。
纵向比较图4和图5发现,当前方大型车辆比例为40%且目标车道车流量占所有车流量的70%时,图4所示距离交叉口停车线100m内,车辆换道概率为0.42;图5所示距离交叉口停车线200m范围内,车辆换道概率为0.52。可见,当前方大车比例、车辆分布情况相同时,离停车线距离增加100m,车辆换道概率增加10%。可以看出,距离交叉口停车线距离越远,车辆的换道概率越高。这是因为,车辆距离交叉口距离较远时,车辆主观选择性更高,驾驶员会实时根据车道状况做出换道决策,随着车队接近交叉口,车辆换道空间条件逐渐不足,车流愈加趋于稳定。
4 结论
本文分析了常规交叉口驾驶员车辆跟驰换道行为的影响因素和跟驰换道车辆状态的变化。基于全速差模型,构建了换道概率的Logit模型。该模型主要从车辆自身状态和周围道路环境状态两个方面,分析影响车辆换道的因素,并通过实际数据对模型参数进行标定,最后对双车道交叉口进行模拟仿真。仿真结果表明,车辆在换道过程中,速度受两个车道前车的影响,同时对于两个车道后车产生影响,实时波动的情况也与实际相符。对于距离交叉口停车线长度不同的情况,对比分析了换道概率与大车比例、车流量分布间的关系。车辆在交叉口的换道行为与跟驰行为两者密不可分,一辆车的换道行为会影响两个车道前后多车的运行状态,频繁的换道行为会引起交通流不稳定和车道安全问题。
本文所建模型可以有效模拟出车辆在交叉口的行驶状况,但其中的交叉口仿真缺少大量精细化车流量数据,下一步将对模型进一步展开精细的参数标定研究。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
卫星应用(2021年11期)2022-01-19
建材发展导向(2021年19期)2021-12-06
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
天津建设科技(2020年2期)2020-05-13
汽车工程(2017年8期)2017-09-15
人民交通(2016年9期)2016-06-01
中国交通信息化(2015年10期)2015-06-06
郑州大学学报(工学版)(2014年6期)2014-03-01
