基于粒子群算法的石英挠性加速度计温度补偿方法研究
2018-10-15 05:28于东康杨功流吴宜荣谢祖辉涂勇强
导航定位与授时 2018年5期
于东康,杨功流,吴宜荣,谢祖辉,涂勇强
(1.北京航空航天大学 仪器科学与光电工程学院,北京 100191;2.福建星海通信科技有限公司,福州 350015)
0 引言
光纤陀螺具备体积小、质量小、可靠性高、动态范围大、线性度好、频带范围宽以及启动时间短等优点,以光纤陀螺和石英挠性加速度计为核心部件的光纤惯组,凭借其优越的性能广泛应用于航天、航空、航海、兵器及多种军民用领域[1]。
目前国内普遍使用的光纤陀螺、石英挠性加速度计其零位和刻度因子受温度变化影响明显,要使光纤惯组在全温范围内(一般为-40℃~60℃)的输出满足精度要求,必须尽可能地消除温度变化对器件性能的制约[2]。目前常用的方法有两种:1)采用温控的方法为惯性器件加温以提供良好的环境温度条件;2)采用实时温度误差补偿技术,对惯性器件进行实时补偿以满足其全温范围内的精度[3]。其中温度误差补偿作为一种纯数学的方法,相较于温控法能够避免结构的冗余,同时也能得到较高的补偿精度,是目前采用较多的一种方法[4-7]。在对温度误差补偿方法的研究工作中,文献[4]利用数据拟合的方法建立了加速度计温度模型,并应用该模型提出了相应的补偿算法;文献[5]提出了基于小波最小二乘支持向量机的石英挠性加速度计温度补偿方法;文献[6]则建立了基于温度和温度梯度的联合多项式补偿模型,设计了基于传统最小二乘拟合的补偿方法。
在本文针对的工程实例中,惯组的石英加速度计精度较低(对应精度在1mg左右,属低精度加速度计),启动后输出稳定性受温度变化影响较大,通过传统的最小二乘补偿方法无法得到满足要求的补偿精度,因而成为制约惯组精度的主要因素。
在经充分验证此类低精度石英挠性加速度计静态温漂特性之后,本文提出了一种引入温度、温度高次项及温度变化率作为变化量的温度误差模型,并设计了基于粒子群算法的温度补偿方法。通过搭建测试平台验证补偿效果,试验结果表明:该方法能够有效补偿石英加速度计的温度漂移,使加速度计输出的零偏稳定性提升1个数量级,具有良好的工程应用价值。
1 石英挠性加速度计温度特性分析
1.1 石英挠性加速度计温度特性
石英挠性加速度计表头的结构如图1所示,主要包括检测质量组件、上力矩器组件和下力矩器组件三部分。在使用过程中,加速度计温度漂移主要由表头结构参数变化、封装热应力和检测电路温度漂移造成[8]。对于石英挠性加速度计来说,表头部分是产生温度误差的主要原因,表头温度的变化和表头力矩器标度因数的温度系数决定着加速度计温度误差的大小。
在加速度计工作过程中,2个因素会直接导致其表头温度的变化:1)工作环境温度的变化;2)由于力矩器线圈在通过反馈电流时自身发热造成的表头温度变化。由自发热导致的线圈尺寸和磁场强度变化由式(1)表示:
l=l0(1+β1ΔT)
B=B0(1+β2ΔT)
(1)
其中,l0和B0分别为常温下(T=20℃)力矩器线圈的尺寸和磁场强度,l和B分别为温度变化ΔT后力矩器线圈的尺寸和磁场强度,β1和β2表示线圈和磁钢的温度系数。
力矩器线圈自发热引起的输出误差可表示为
δ=(1+β1ΔT1)(1+β2ΔT2)-1
(2)
基于上述分析,如果考虑加速度计零偏温度特性模型是实时温度T与百秒温度变化ΔT的函数,即可表示为
K0=φ(T,ΔT)
(3)
式中,K0为加速度计的零偏。
1.2 石英挠性加速度计温度补偿模型
工程上使用的加速度计误差模型为
N=K(K0+a+εa′)
(4)
式中,K为标度因数,a为对应轴向的输入加速度,ε为安装误差项,而a′为输入轴垂直方向上的加速度。
温度变化带来的影响主要为标度和零偏的变化,反映在公式上,则可将式(4)表示为
N(T)=K(T)(K0(T)+a+εa′)
(5)
如重点考虑对零偏的补偿,即忽略温度对标度因数的影响,采用先温补再标定的工程方案。针对石英挠性加速度计温漂特性,提出与温度和温度变化率有关的温补模型
ΔN=aT+bT2+cT3+dΔT+eΔT2
(6)
式中,ΔN为补偿量,亦即加速度计的零位漂移量,a、b、c、d、e为温补参数。式(6)给出的模型结合了温度场的变化速率以及不同温度条件下的数据,能够很好地反映速度计的温度漂移情况[9]。
1.3 传统最小二乘法拟合温补系数
借助式(6)建立的温度漂移模型,通过一定方法求取相关系数并加以补偿,可以达到温补目的。最小二乘法就是其中一种行之有效的拟合温补参数的方法,也是工程上使用较多的传统方法。
y=ΔN(T,ΔT)=aT+bT2+cT3+dΔT+eΔT2
(7)
式(7)为关于T和ΔT的二元三次多项式。根据最小二乘法的定义,就是要通过给定的数据(Ti,ΔTi,yi)确定其中几个系数,使得在各个点上的偏差δ平方和∑δ=∑[∑ΔN(Ti,ΔTi)-yi]2达到最小。
利用Matlab提供的regress函数,可以实现最小二乘拟合求参,该方法特点为使用便捷,无需复杂的调参步骤,但同时得到的补偿精度有限,在某些工程环境下难以满足需要。
2 粒子群算法用于温漂补偿
2.1 粒子群算法基本原理
粒子群算法(Particle Swarm Optimization,PSO)是模拟鸟群捕食行为的一种算法。该算法针对被优化的函数,首先初始化一群随机粒子(随机解),所有的粒子都有一个被优化函数决定的适应度值。每个粒子还有一个速度来决定它们飞行的方向和距离,粒子们追随当前的最优粒子在解空间中搜索[10]。
寻找最优解的过程通过迭代实现,每次迭代中粒子位置的更新是靠追踪2个极值来完成,分别是粒子本身找到的最优解,即个体极值,以及整个种群当前找到的最优解,即全局极值。
粒子群算法比遗传算法规则更为简单,没有遗传算法的交叉(Crossover) 和变异(Mutation) 操作,通过追随当前搜索到的最优值来寻找全局最优。这种算法以其实现容易、精度高、收敛快等优点引起了学术界的重视,并且在解决实际问题中展示了其优越性。
(8)
(9)
式(8)、式(9)为粒子群算法的核心公式,该算法由以上两式完成速度和位置的更新,式中kg=1,2,…,G,i=1,2,…,size,r1、r2为0到1的随机数,c1为局部学习因子,c2为全局学习因子,p和BestS分别表示局部最优解和全局最优解。
对参数的设置是算法中重要的一环,其中包括:1)粒子数的选取,常取20~40,对于比较复杂的问题,也可取100或200。2)最大速度Vmax的设定,该值决定粒子在一个循环中最大的移动距离,通常小于粒子的范围宽度。较大的Vmax可以保证粒子种群的全局搜索能力,较小的Vmax则可以加强粒子种群的局部搜索能力。3)学习因子c1、c2一般取值2.0,通常c2取值更大些。4)惯性权重w(t):一个大的惯性权值有利于展开全局寻优,而一个小的惯性权值有利于局部寻优[11]。
PSO算法以流程图如图2所示。
2.2 粒子群算法用于温漂补偿
依据式(6)建立算法模型
eΔT2,i=1,2,…,N
(10)
辨识误差指标取
(11)
J取值越小,说明模型输出越接近实测数据,此时补偿量即为
ΔN=aT+bT2+cT3+dΔT+eΔT2
(12)
利用Matlab中提供的粒子群算法工具箱(PSOt)进行编程,采用上面所述方法对三轴加速度计输出分别建立温度补偿模型。参考粒子群算法在实际工程中的应用,针对本优化模型,待辨识参数的取值范围设置为[-1,1],粒子数取50,共迭代500次,粒子最大速度以及学习因子等参数取工具箱默认值,以此实现该算法模型[12-14]。
3 试验验证与结果
试验平台主要包括温箱、电源、工控机、数据采集及处理模块、上位机测试软件以及外围接口电路等,如图3所示。试验对象为某型光纤惯组,其光纤陀螺和石英加速度计内部均设有测温电阻,可实时检测其内部温度并与器件输出一并发至上位机。
3.1 参数辨识过程
由于加速度计的温度漂移受温变速率与当前温度值的影响,为了求取加速度计在全温条件下的温度模型,必须采样不同温度及不同温变速率下的加速度计零位漂移[15]。试验中分别选取温度点为-40℃、0℃、60℃,且在变温过程中选择不同的温变速率,建立温度变化模型如图 4所示。采集在此温变模型下光纤惯组三轴加速度计的输出作为样本集,以粒子群算法辨识温补参数,并代入样本数据进行验证。
3.2 验证过程
将温补参数加载到下位机中,并设置下位机程序使其能够同时输出加速度计温补前和温补后参数。然后分别在温度点-40℃、-20℃、0℃、20℃、40℃、60℃,采集加速度计输出。
具体方法是:在温箱达到设定温度后,保温2h使系统达到热平衡,之后惯组上电并采集1h数据,以模拟加速度计在该温度环境下的工作状态。实际上,加速度计温度会经历由自发热导致升温并逐渐达到温度稳定的过程。对比温补前和温补后加速度计的输出曲线,并以2个状态下的零偏稳定性作为参考,验证本文提出的温度补偿方法的实际效果。
3.3 结果分析
以y轴加速度计为例,分别验证其在低温-40℃,常温20℃以及高温60℃下的输出及补偿后曲线,试验中加速度计温度可通过温度传感器实时得到,其温度变化曲线如图5所示。
由图5可以看出,加速度计的工作温度存在一个缓变过程,温度的变化将导致输出的漂移。图 6~图 8给出了补偿前后加速度计输出对比曲线,可以发现未经补偿前在不同温度点下开机,加速度计输出先是表现为一个较大的零偏值,之后在系统温度上升并最终达到热平衡的过程中,加速度计输出减小,输出曲线上升,并在系统达到热平衡之后输出曲线方才趋于平稳。而补偿后的曲线被明显拉平,输出维持在0附近,可认为在系统启动至达到热平衡的过程中输出保持稳定。
表 1所示为经粒子群算法补偿前后加速度计零偏稳定性的计算情况,补偿前y轴加速度计的零偏稳定性在0.6mg左右,而经粒子群算法补偿之后零偏稳定性不超过0.1mg,最优值接近0.05mg,相较于补偿前提升了近1个数量级。同时与最小二乘法得到的补偿结果相对比,不难发现粒子群算法结果更优,在一定程度上能够获得更高的补偿精度。
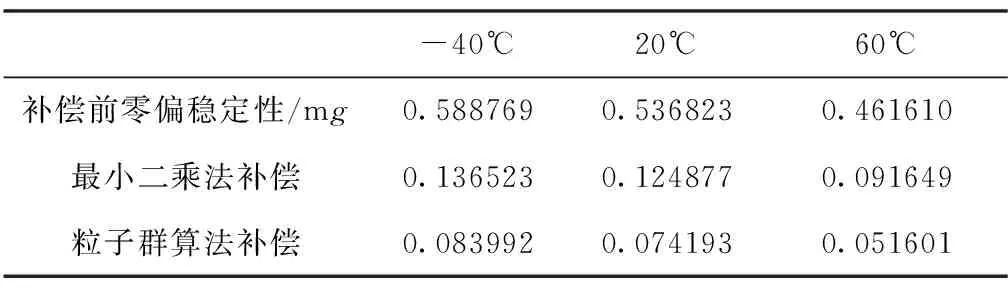
表1 不同温度下加速度计补偿前后零偏稳定性
4 结论
本文针对工程实例中对惯组石英挠性加速度计输出稳定性(随温度变化)的需求开展研究,进行了如下工作:
1)通过分析石英挠性加速度计的温度特性,提出了一种与温度、温度高次项及温度变化率相关的温度误差模型;
2)在温补参数辨识工具的选择上,使用了粒子群算法,通过对算法的合理设计及参数的合理设置,实现了对模型参数的准确辨识;
3)搭建了试验平台对本文提出的温度补偿方案进行验证,该补偿算法在试验中表现出良好的补偿效果,成功将加速度计零偏稳定性提升近1个数量级,收敛速度快,算法易于实现,可有效提升惯组精度。
猜你喜欢
印制电路信息(2022年8期)2022-09-21
传感器与微系统(2022年3期)2022-03-23
飞控与探测(2021年5期)2022-01-05
矿产保护与利用(2021年6期)2021-03-22
科学导报(2020年50期)2020-09-09
导航与控制(2020年3期)2020-09-09
导航与控制(2019年4期)2019-09-25
分析化学(2018年8期)2018-11-01
舰船科学技术(2018年5期)2018-06-01
科技创新与应用(2018年10期)2018-04-21