
无人机与视觉模块联动硬件选择和调试
2018-10-19 09:29李凯周乔李明豪
数码世界 2018年9期
李凯 周乔 李明豪
1 前言
四旋翼飞行器,是一种由四个螺旋桨十字形交叉构成的飞行器。4个螺旋桨产生的推力相同时,两组正反桨对机身所施加的反扭矩两两抵消,使得绕垂直方向旋转的反扭矩平衡,从而确保了航向的稳定。本文所介绍的四旋翼飞行器是一种具有自主起降功能,飞行高度较低,同时可以根据信标自主规划航线的小轴距四旋翼飞行器。该飞行器上搭载RX23t单片机作为控制导航核心,获取高度,信标位置信息后,向飞行控制器发送飞行指令。飞行控制器根据实时飞行姿态的处理,结合接收到的飞行控制指令,向四个电子调速器发出四路PWM波信号,从而驱动对应的无刷直流电机,调整飞行姿态。经过不断测试,对飞行时各项参数的分析,设计控制算法,最终实现具有一键式起飞,定点定高悬停等功能。
2 硬件系统设计
该四旋翼自主飞行器由导航控制器、飞行控制器、距离传感器、摄像功能模块、电机驱动模块等部分组成,以下为各模块的选择和论证。

图1.四旋翼飞行器系统框图
2.1 导航控制器模块的论证与选择:
方案一:采用51系列单片机,51单片机作为8位处理器,其功能完备,开发简单,价格低廉,通用性好。但其主频有限,运行速度慢,片内外设少,芯片本身的保护能力差,不适用于高速实时应用。
方案二:采用瑞萨RX23T系列单片机,其最大频率可达到40Mhz,其支持单精度流动小数点演算器(FPU)、乘除计算器、乘积加法演算器(MAC命令)。通信功能方面其支持硬件I2C、SPI、UART等多种通讯方式。其丰富的定时器、外设及完善的安全性能非常适用于无人机的飞行控制使用。
对于小型四轴飞行器来讲,其稳定性差,对重量敏感,要求其导航板控制频率高,输入输出功能强大,外设I/O多,工作稳定,因此选择方案二。
2.2 传感器模块的论证与选择:
2.2.1 测距传感器的论证与选择:
方案一:超声波传感器一般作用距离在0.1-5米。通过反射回来的声波根据声速计算出距离。因为声波的特性,所以超声波传感器受环境影响比较小,使用场合比较广泛。
方案二:采用反射式红外线测距传感器,其测距基本原理为发光管发出红外光,光敏接收管接收前方物体反射光,接收管接收的反射光强随反射物体的距离而变化的。其优点是简单便宜,但测量距离近,方向性差。
综合以上两种方案,考虑到实际飞行高度,最终选择方案一。
2.2.2 循迹传感器的论证与选择:
方案一:采用光流传感器,利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的.但其需要获取的图像具有较多的特征点,受光照环境影响也较大。
方案二:采用CMOS图像传感器,CMOS图像传感器上集成AD转换器、自动曝光量控制、非均匀补偿、白平衡处理、黑电平控制、伽玛校正等,从而可以进行快速计算和图像信息采集。
综合以上两种方案,飞行区域除黑色圆块和最终选择保真度高,抗噪声干扰能力大的CMOS成像的OV7725摄像头作为图像传感器。在模块型号方面选择了OpenMV3 Cam,它是一个开源,成本较低的摄像功能模块。
2.3 电机驱动模块
方案一:采用有刷空心杯电机,有刷电机常见于大多数小型飞行器,由于其电刷和换向器之间有摩擦,存在效率降低、噪音增加、容易发热,效率低、输出功率小等缺点,优点是成本低。
方案二:采用无刷电机,无刷直流电机利用电子元器件的开关特性取代了机械碳刷使换向变得无机械接触,所以其具有低能耗、低噪音、超长寿命、高可靠性的特点。
综合以上两种方案,为了保证飞行器的动力和稳定性,我们选用无刷电机。
2.4 飞行姿态获取模块的选择:
MPU6500多轴传感器,它整合了三轴陀螺仪、三轴加速度计,用了三个16位的ADC可将其测量到的模拟量的加速度和角速度转化为可输出的数字量加速度和角速度,同时具有SPI通信总线类型。在满足精度要求的条件下,从成本和抗干扰能力等方面分析,非常适用于飞行器的飞行姿态的获取和处理。
3 系统软件设计与分析:
3.1 飞行姿态的算法分析:
3.1.1 飞行姿态处理:
串级PID分为内环和外环PID。而我们的程序设计中采用了4个双闭环来调节,其中包括了PITCH,YAW,ROLL的角速度和角加速度组成的双闭环和高度及Z轴加速度组成的双闭环,如图3.1和图3.2所示。其中Z轴的加速度传感器由超声波传感器得到的长度求微分得到,油门的拟合则直接采用线性拟合。

图3.1 高度环串级PID控制结构图
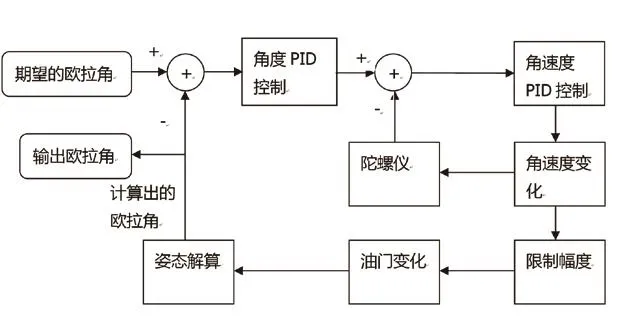
图3.2 角度环串级PID控制结构图
3.1.3 飞行运动轨迹控制
首先基于串级PID控制系统,我们将改变的设定值的数值,并将其放在欧拉角的外环。这种控制拥有诸多优点,例如抗干扰等。所以我们在程序中添加了定向运动函数,计算出“目标设定值”,根据这个值来影响PITCH,ROLL的串级PID外环,并做了关于位移控制的几种猜想。
猜想一
由一个简单的三角函数组成冲击脉冲对无人机的稳态进行破坏,然后迅速回0,然后通过单级PID控制输出,观察无人机的状态,并且记录冲击所造成的无人机姿态变化和位移记录。

图4.1 三角函数冲击脉冲
猜想二:
有一个阶跃函数对无人机的PITCH,ROLL的串级PID外环直接造成一个冲击,并通过单片机中的定时器对阶跃函数的值进行有规律的改变。观察无人机的状态,并且记录冲击所造成的无人机姿态变化和位移记录

猜想三:
利用无人机的视觉模块传回来的偏差值,将所要经过的路线采用解算时一次,加速,减速,平衡的过程,不断向终点靠近。
结论:
经过大量的实验,猜想三和小车循迹的算法接近,但是在无人机飞行控制的效果多不理想,由于阻力较小,无人机并不能很好的完成定点减速的功能。猜想一最为平滑的接近,与期望控制的理想效果最为接近,由于无人机本身有一定的偏移量,而冲击量最终拟合到飞行状态时,具有很大的偶然性,实现效果差。
3.2 图像的获取与处理:
飞行导航系统主要围绕黑色圆块及小车信标控制飞行器,飞行器需要在黑色圆块和小车上方悬停。我们将OPENMV摄像模块安装至飞机底部,采集地面图像信息后通过串口发送给瑞萨RX23T导航板,导航板收到信息后,判断飞机此时与信标的相对坐标,然后发出飞行运动指令给飞行控制芯片。
4 系统测试方案与结果
4.1 硬件系统测试方案:
1)利用数字万用表检测电路的连接情况,排除由于虚焊引起的断路、短路或器件损坏等电路故障。
2)飞行器开机后根据指示灯状况,判断飞行实时数据的正确性。
3)通过数字逻辑分析仪观察飞控输出的PWM波形,确保电调工作正常。
4)摄像头与超声波等模块使用其他的可靠单片机系统板,飞行前确保工作正常。
4.2 飞行器的功能性测试与分析:
由于无人机计算出来的欧拉角与真实欧拉角之间存在一定的偏差,所以无人机飞至水平时,记录真实的水平欧拉角,多次记录,飞行结束后更新。多次试验后得到较稳定的补偿值。在实现位移过程中,通过调用冲击函数调节角度的外环,经过多次测试,最终选定多个阶跃函数,实现了脱离,捕获信标等功能。
通过配合瑞萨RX23T单片机,本飞行器可以实现一键起飞,定点定高悬停,捕获信标,跟踪飞行等功能。
5 总结
该四旋翼自主飞行器从起初设计方案,再到实施过程,无论是硬件电路的设计还是软件仿真的测试,我们一直秉承着严谨的科研态度,由于四旋翼飞行器自身是一个非稳定性系统,坚持稳定性与精确性并重是我们一直以来坚持的原则,在该原则基础上,我们不断优化算法,反复尝试,多次试验分析数据,逐渐实现黑点悬停,颜色识别,信标捕捉等功能。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
舰船科学技术(2021年7期)2021-08-11
小哥白尼(军事科学)(2021年4期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
发明与创新(2016年17期)2016-12-22
发明与创新·大科技(2016年5期)2016-05-17
汽车文摘(2015年9期)2015-12-10
