
一种三轮结构的全方位机器人运动规划*
2018-11-01 12:17叶长龙姜春英于苏洋
组合机床与自动化加工技术 2018年10期
叶长龙,陈 磊,姜春英,于苏洋
(沈阳航空航天大学 机电工程学院,沈阳 110136)
0 引言
全方位移动机器人是移动机器人领域重要的研究课题之一,它具有平面的3个运动自由度,能够实现平面内任意方向的运动,且不需要较大的运动空间,广泛应用于人类生产、活动的拥挤场所[1]。常见的全方位轮有:麦克纳姆轮[2],正交轮[3]和球轮[4]等。
许多科研人员已经对全方位机器人的运动特性和路径规划问题进行了研究。例如,使用Eight-Shaped Path和Bounded Curvature Path分析了全方位机器人的运动特点[5];全方位移动机器人具有的重要特点是:当两点之间的距离在一个定值范围内时,机器人沿固定圆弧轨迹运行要比沿直线轨迹运行的效率要高[7];提出了4大类18种全方位机器人最小时间运动轨迹规划,为机器人的运动规划提供了理论基础[8];分析了四轮全方位机器人在速度、加速度等方面的各向异性[9]。
本文通过对传统移动机器人加速方式的研究,提出并分析了在无障碍平面运动时,三轮全方位机器人在平面内“点到点”的两种加速运动规划方法。该规划方法利用全方位移动机器人速度和加速度的各向相异性,使机器人沿极限加速度方向加速并沿极限速度方向匀速运动。建立全方位移动机器人的运动学方程,完成了加速方法的模拟仿真,并进行对比分析,得出了各自方法的优越性。
1 三轮全方位机器人运动分析
1.1 三轮全方位机器人运动学方程
三轮MY轮全方位移动机器人的运动学方程如下[10]:

(1)
其逆运动学方程:
(2)



r为MY轮半径;
L为机器人接地回转半径。

图1 三轮全方位机器人运动学分析图
1.2 全方位机器人速度、加速度各向相异性
在参考了文献[9]中四轮全方位机器人速度、加速度各向相异性的基础上,把轮子所提供的最大转速和地面所提供的最大摩擦力作为限制条件,求得了三轮全方位机器人平移运动中速度和加速度的各向相异性,如图2、图3所示。
由图2、图3可知,当全方位机器人行进方向与轮1夹角为α=60°×n(n=0,1,…5)时,机器人可获得最大的平移速度,将机器人在该方向所能达到的最大速度称为机器人极限平移速度,该方向称为极限平移速度方向,在此方向上机器人能达到的最大加速度最小;当α=30°+60°×n(n=0,1,…5)时,机器人在该方向上获得的最大平移速度最小,但可以获得的最大加速度最大,将机器人在该方向所能达到的最大加速度称为机器人极限平移加速度,该方向称为极限平移加速度方向。机器人极限平移加速度方向与极限平移速度方向之间存在30°的角度差。
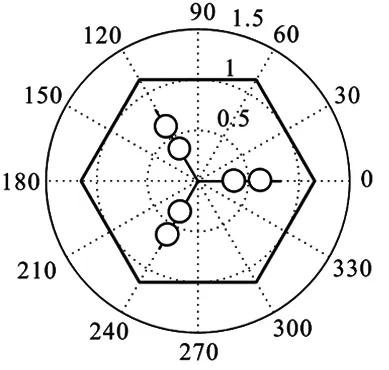
图2 平移运动中三轮全方位机器人速度各向相异性
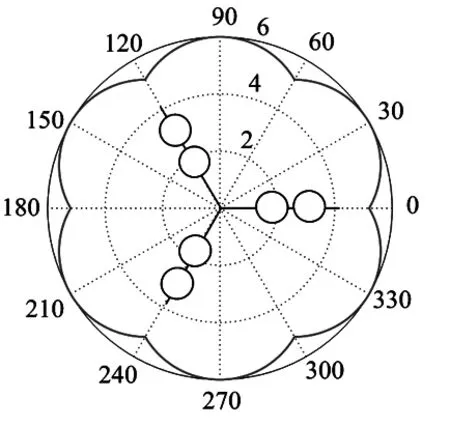
图3 平移运动中三轮全方位机器人加速度各向相异性
OA方向为α=0°时机器人运动方向,此方向上机器人可以获得极限平移速度;OB与OC方向则是与之相近的两个机器人可以获得极限平移加速度的方向,如图4所示。
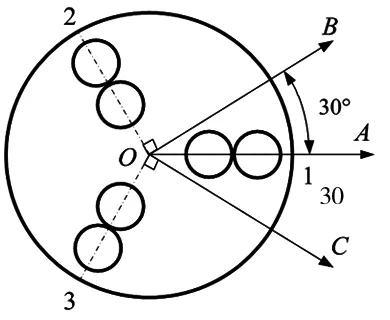
图4 极限速度与极限加速度夹角
1.3 两个极限方向的运动分析
(1)三个轮的转速分别为:
(3)
(2)机器人移动速度为:
(4)
而当机器人沿着极限平移速度方向运行并达到极限平移速度时,其具有如下运动特征(特征2):
(1)3个轮的转速分别为:
(5)
(2)机器人线速度为:
(6)
机器人由静止开始沿着OB方向加速并达到特征1的过程中,为使全方位轮不发生打滑现象,机器人的轮速比为:
(7)
只要各组全方位轮获得特征2的轮速,机器人就能以最大速度做匀速直线运动。但关键的技术是实现特征1与特征2的流畅转换。
特征1与特征2的本质区别是机器人的运动方向存在30°的夹角,利用全方位机器人运动的全向性,可以仅通过平移运动实现运动方向的直接变化,例如在机器人直线运动中可以增加自转来实现方向变换。
2 新型三轮全方位机器人运动规划
本次运动规划为起始点距目标点1.5m的“点到点”无障碍规划。目的是利用全方位机器人的特点规划出一套优于传统加速方法的新型加速方法,整套方法可以用更短的时间到达目标点,并可被扩展用于实现机器人避障。下面分别对三轮全方位机器人无自转和有自转两种新型加速运动规划方法进行介绍。
2.1 无自转型运动规划
对比式(3)~式(6)能得出结论:轮1和轮3转速的不同,导致了机器人运动特征1和运动特征2之间迥异运动状态的产生。因此轮2转速保持不变,只需同步协调改变轮1、轮3的转速,如下:
(8)
由式(8)可知,对轮1和轮3进行了无限趋近极值的增、减变化,通过二次轮速的改变,即“二次加速”,使机器人变换了运动趋势并改变了运动方向还能保证轮1、轮3转速的变化率相同。
为了避免轮子与地面之间打滑现象的发生,在机器人“二次加速”的整个过程,单个轮子的加速度采用线性变化增加到最大加速度,再采用线性变化递减到0,单个轮子所提供的最大加速度为aOB=fμmax/m。3个轮子的加速度变化可以表示为:
加速过程:
(9)
减速过程:
(10)
机器人在进行运动特征变换时,轮1、轮3的轮速参数方程如下:
(11)
由文中所建立的运动学方程,求得全方位机器人瞬时速度为:

(12)
机器人自转角速度为:
(13)
由式(12)可知,若机器人轮子与地面无打滑现象发生,则机器人在“二次加速”过程中,其移动速度会随时间增加。而由式(13)可知,整个过程中机器人的自转角速度始终为0,所以机器人不发生自转。使用这种无自转型加速规划方法加速,机器人加速时的加速度可以达到极限加速度,并能无自转地调整到极限速度方向以极限速度匀速行进。
全方位机器人按照常规加速方法与按照无自转型加速方法运行时的运动示意图,如图5所示。从图中可以看出,两种加速方法在正常行驶阶段的运动状态相同。但在加减速阶段,无自转型加速方法比常规加速方法向外侧方向线性偏移距离h。为了抵消线性偏移并使机器人在最短时间内完成减速,最终达到目标位置,机器人在无自转型加速方法中的减速与加速过程速度变化率数值相同。

图5 无自转型加速方法运动示意图
2.2 自转型运动规划
在无自转型运动规划过程中,正常行驶阶段会有偏移现象,为了使机器人运动结束时到达目标位置,需用一个与加速过程相反的减速过程来修正偏移误差。本节将采用带自转型的运动规划方法来改变运动方向,该运动规划不会发生线性偏移。
首先让机器人沿极限加速方向加速至该方向的最大速度,之后机器人边平移边自转,转到极限速度方向,并以极限平移速度匀速运行。由于当机器人处于特征1时,轮2已经加速到了极限转速,若机器人要想发生自转,只能降低轮2的转速。考虑到轮子不发生打滑和轮子具有极限转速的因素,轮2加速度变化的参数方程为:
加速过程:
(14)
减速过程:
(15)
轮2的速度变化:
(16)
将式(9)、式(10)与式(14)带入全方位机器人运动学方程,求得机器人速度为:
(17)
机器人角速度为:
(18)
由式(17)可知,机器人能顺利完成“二次加速”过程的必要条件是,需保证机器人速度数值持续稳步增大。由式(18)可得,机器人角速度不会达到极限0值,因此在加速时一定会伴随自转运动。
在有自转型加速方法中,即机器人在沿着极限加速度方向进行“一次加速”和“二次加速”过程的同时,用本体自转的方式改变其运动方向,如图6所示。整个加速运动过程中,机器人始终沿着同一条直线稳步运动,未发生线性偏移。全方位机器人的减速与加速过程运动方向相反,互为逆运动。应用该规划方法可使机器人在最短时间内完成减速,恢复到最初的运动状态,最终达到目标位置。

图6 自转型加速方式运动示意图
3 仿真实验
应用MY轮全方位移动机器人的运动学和动力学模型[10],可以计算得到机器人加速运动中的位移、速度、加速度和各个驱动电机所需要的转矩。在进行仿真时,设定目标点与起始点的距离为1.5m,选取L′=L1+0.47(L2-L1)作为全方机器人回转半径的最佳比例因子[10]。
表1为三轮MY轮全方位移动机器人的运动仿真的各项参数数据,将表1中的参数代入方程并进行模拟仿真,可以得到全方位机器人无自转型加速运动方法的位移、速度和加速度(图7a),三组全方位轮中驱动电机的转速(图7b)和转矩(图7c),仿真结果如图7所示。同样,可以得到全方位机器人自转型加速方法的仿真结果,如图8所示。
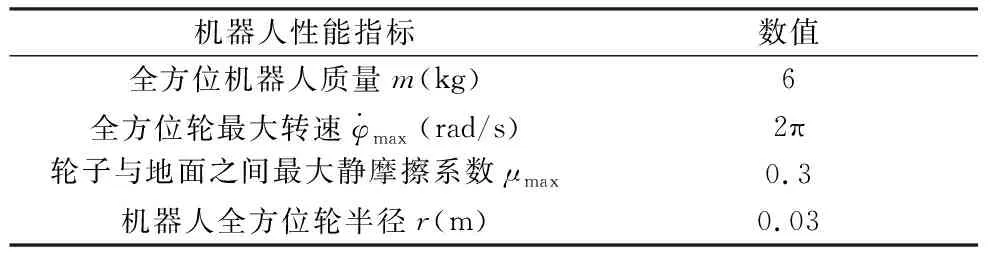
表1 仿真参数
表2是通过结合MY轮全方位机器人运动学分析的运动约束方程式[10],并仿真计算得到的常规加速规划方法和上述两种新型三轮全方位机器人加速运动规划方法的运动效果对比图表。
由表2的对比结果可知,用新型加速规划方法所用行驶时间比常规加速方法所用行驶时间最多减少了10.3%,且加速时间最多减少了41.1%。机器人采用无自转规划方法运动使用的时间最少,但在位移方面,线性偏移的存在会导致机器人的运动路程较长。带自转运动规划方法解决了线性偏移,使机器人从起始点以直线行驶至目标点。在今后对机器人整体避障运动的控制中,可以利用无自转规划方法的线性偏移这一特性使机器人避开前方障碍,在前方无障碍但两侧有障碍时则使用带自转的运动规划方法。

图7 无自转型规划方法仿真结果图

图8 自转型加速方法仿真结果

表2 两种新型全方位机器人运动规划的运动效果对比
4 结论
本文研究了在无障碍平面内,三轮全方位移动机器人在加速运动时,采取的平面内“点到点”的两种新型运动规划方法。通过模拟仿真并对比两种运动方法的物理参数数据,得到如下结论:
在起始点与终止点相距1.5m且无障碍的情况下,采用新型加速方法规划机器人运动比采用常规加速方法更节省运动时间。在所有的规划方法中,无自转型加速方法行驶的路程最长,但用时最短。可以合理利用其线性偏移的特性实现快速避障。带自转加速方法不存在线性偏移的现象,可以完成仅直线运动下的快速加速运动。在后续的研究中将合理利用两种新型加速方法去实现机器人的快速避障。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
当代水产(2022年6期)2022-06-29
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
制造技术与机床(2017年3期)2017-06-23
海军航空大学学报(2015年1期)2015-11-11
筑路机械与施工机械化(2014年8期)2014-03-01
