
不同动压下双引导减速伞拉直过程的数值仿真
2018-11-12 03:56张明亮高普云程文科岳健
航天返回与遥感 2018年5期
张明亮 高普云 程文科 岳健
不同动压下双引导减速伞拉直过程的数值仿真
张明亮 高普云 程文科 岳健
(国防科技大学航天科学与工程学院,长沙 410073)
减速伞拉直过程是返回舱回收着陆工作的重要一环。单、双引导伞均可以拉直减速伞,两者结构不同,拉直效果也不同。双引导伞是在单引导结构基础上的一种深化,虽然结构相对复杂,但是可以在不同动压下拉直减速伞,比单引导伞更加安全可靠。文章对此进行了分析和研究。首先基于弹簧质量阻尼原理,建立了双引导减速伞拉直过程的动力学分析模型,对其从低到高多种动压下的拉直过程进行了数值仿真计算。然后选择低动压和高动压中两种情况的拉直过程进行分析,研究了双引导减速伞的工作原理,并与相同条件下单引导减速伞的拉直过程进行了对比。最后,从拉直时间和引导伞拉力两方面研究了不同动压对单、双引导下减速伞拉直过程的影响。结果表明:双引导减速伞可以适应不同动压,能够安全拉出减速伞;与单引导结构相比,双引导结构在低动压下拉力大,拉出时间短,高动压时拉力小,伞绳不易损坏,更加安全。该结论对回收着陆过程中减速伞结构的选择和设计具有重要的参考价值。
单引导结构 双引导减速伞 拉直过程 数值仿真 动压 回收着陆
0 引言
随着载人航天技术的不断进步和发展,回收着陆分系统也越来越完善。目前载人回收系统中减速伞多以单引导伞拉直,如美国的载人飞船,我国的“嫦娥”系列等,而我国的“神舟”系列飞船回收系统中减速伞则是采用双引导伞拉直的[1]。
降落伞拉直过程比较复杂,上世纪70年代,Wolf[2-3]提出了连续拉直模型,对降落伞拉直过程的稳定性进行了分析。但是这种模型假定拉直过程中伞绳始终保持直线状态,仅适用于拉直方向与流场速度方向一致的理想情况,但实际上由于风场、攻角等方面的影响,这一假设很难实现。Moog[4]提出了“绳弓”的概念,并采用三个相互之间由弹簧连接的质量节点表示已拉出的伞绳伞衣,较好地模拟了“海盗号”探测器拉直过程中伞绳的弯曲现象,但由于模型过于简单,仿真所得拉直力误差较大。80年代,Purvis[5-7]在充分考虑气动力、拉力、重力以及摩擦力对拉直过程影响的基础上,将降落伞离散为由弹簧阻尼连接的质量节点,并用这一模型分析了降落伞的拉直过程,与试验结果的对比表明,该模型能够很好的模拟拉直过程中伞绳伞衣的弯曲现象。Purvis的模型后来被用于Sandia试验室开发的降落伞拉直过程仿真软件[8]。在国内,宋旭民、程文科、张青斌、王海涛、余莉、荣伟等人分别对弹簧质量阻尼模型、多刚体模型等建模方法进行研究,并就单引导式降落伞的拉直过程、“绳帆”现象、拉直力以及超声速下无引导减速伞的弹射拉直等方面进行了深入分析[9-20]。
单引导减速伞仅有一个引导伞,结构如图1所示。当动压较小时,减速伞可能会因为绳索张力不足而拉直失败;动压较大时,减速伞绳索可能会因为张力过大而断裂失效。所以无法同时满足逃逸求生、高速着落等情况的需求。相比单引导结构,双引导载人减速伞更加安全可靠。因为该减速伞包含大小两个引导伞,引导伞之间用限力连接带连接,其结构如图2所示。当动压较小时,大引导伞张开拉减速伞,大引导伞气动阻力面积大,可以保证减速伞顺利拉直;当动压较大时,大引导伞展开后,限力连接带会因拉力过大而断裂,大引导伞就会脱离减速系统,此时小引导伞就会展开工作,小引导伞气动阻力面积小,可以在确保绳索安全的情况下顺利拉直减速伞。而目前国内外大多是对于单引导减速伞的研究,双引导减速伞方面的研究极少,因此有必要对双引导减速伞进行研究。
本文以某型号航天器回收着陆过程中的双引导减速伞为对象,对其从低到高多种动压情况下的拉直过程进行数值仿真计算和研究分析,并与单引导减速伞进行比较。所得结论为回收着陆过程中减速伞结构的选择和设计提供一定的参考。
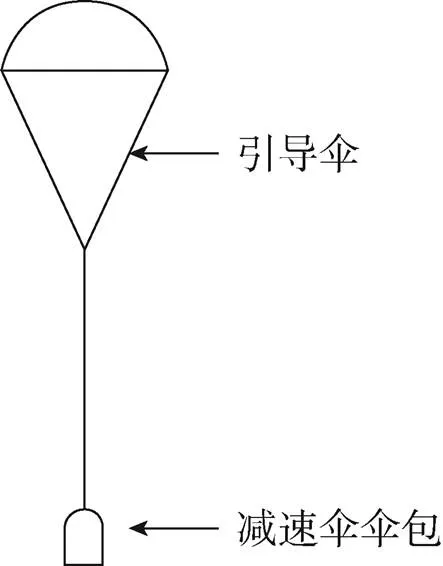
图1 单引导结构示意
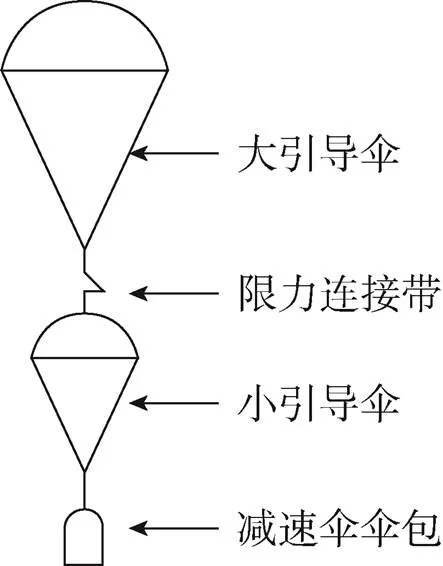
图2 双引导结构示意
1 双引导减速伞的建模
单、双引导减速伞的建模方法基本相同。其中返回舱、伞舱盖可视为六自由度刚体,引导伞伞包、减速伞伞包采用变质量的三自由度刚体模拟。引导伞以及减速伞则视为柔性绳索,将伞绳、伞衣离散为段,绳段的质量集中在两端(即节点处),相邻节点通过弹簧阻尼连接,且只有当相邻节点距离大于绳段原长时才会产生拉力。
双引导伞结构更为复杂,需要判断大引导伞是否脱离。高动压情况下其拉直减速伞的过程主要包括伞舱盖的弹出、伞舱盖拉引导伞包、大小引导伞拉直、大引导伞工作并脱离、小引导伞工作拉减速伞等一系列复杂动作;在低动压时,大引导伞展开后会一直工作并拉出减速伞。
1.1 返回舱、伞舱盖的运动方程
返回舱、伞舱盖部分视为六自由度刚体,采用刚体动力学方程描述。根据克希霍夫方程,一般刚体在其体坐标系中的动力学方程可以表示为如下的旋量形式:

1.2 引导伞伞包、减速伞伞包的运动方程
两种伞包的均采用变质量的三自由度刚体模拟,它们的动力学方程如下
式中B为伞包质量;B为伞包在惯性系中的速度矢量;B为拉伞包过程中合外力矢量,主要包括伞包重力、伞包连接带中拉力、伞包气动力;L为正在展开部分的质量线密度,并认为连接带、伞绳各自的质量分布是均匀的,伞衣的质量分布是线性减小的,伞衣底边处最大,伞顶处为0。
1.3 大小引导伞以及减速伞的运动方程
大小引导伞以及减速伞的运动方程是相同的,以减速伞为例进行说明。采用多质量节点阻尼弹簧模型需要对减速伞进行离散化,将伞绳、伞衣离散为段,绳段的质量集中在两端,即节点处,相邻节点通过弹簧阻尼连接,且只有当相邻节点距离大于绳段原长时才会产生拉力。图3为降落伞绳段模型,在降落伞的拉直过程中,根据拉出状态不同,可以将节点分为三种状态:已经拉出节点、正在拉出的节点以及伞包中未拉出的节点,如图4所示。
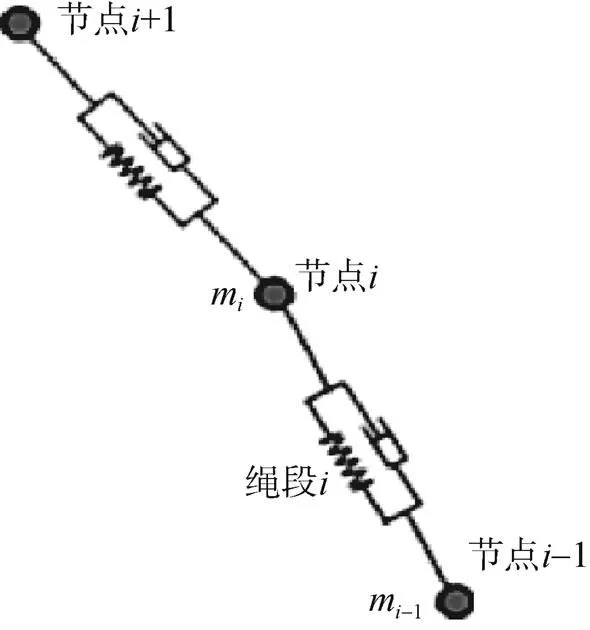
图3 降落伞绳段的模型

图4 拉直过程中降落伞节点的分布
已经拉出的降落伞节点在气动力、拉力、重力的作用下运动,其运动方程可以表示为

式中为已拉出部分的节点编号;m为节点质量;v为该节点在惯性系中的速度矢量;G为重力;a,i为所受气动力;T与T1分别为与该节点相连的前后两段绳索微元中的张力。


正处于被拉出状态的降落伞节点主要受到前一节点拉力,摩擦力及捆绑约束力作用,其动力学方程可以表示为:

式中f,i为节点与伞包之间的摩擦力;cs,i为节点捆绑约束力。
降落伞未拉出伞包的节点跟随伞包一起运动,因此可以将其动力学方程表示为:
1.4 大引导伞是否脱离的判断
双引导伞拉直减速伞的判断,取决于限力连接带所受最大拉力c与其额定载荷cs的大小关系。大引导伞展开之后,如果c≤cs,则大引导伞不脱离,并拉出减速伞,期间小引导伞不展开;如果c>cs,则大引导伞脱离,之后小引导伞展开,拉直减速伞。而单引导伞拉直减速伞不需要判断。
2 模型验证
利用上述建模方法,对地球环境下试验某伞的空投过程进行仿真分析。
图5为两个时刻减速伞的仿真位形与空投录像的对比图,可以看出仿真结果能够在一定程度上预测和复现空投结果,因此该模型可以对减速伞的拉直过程进行仿真分析。
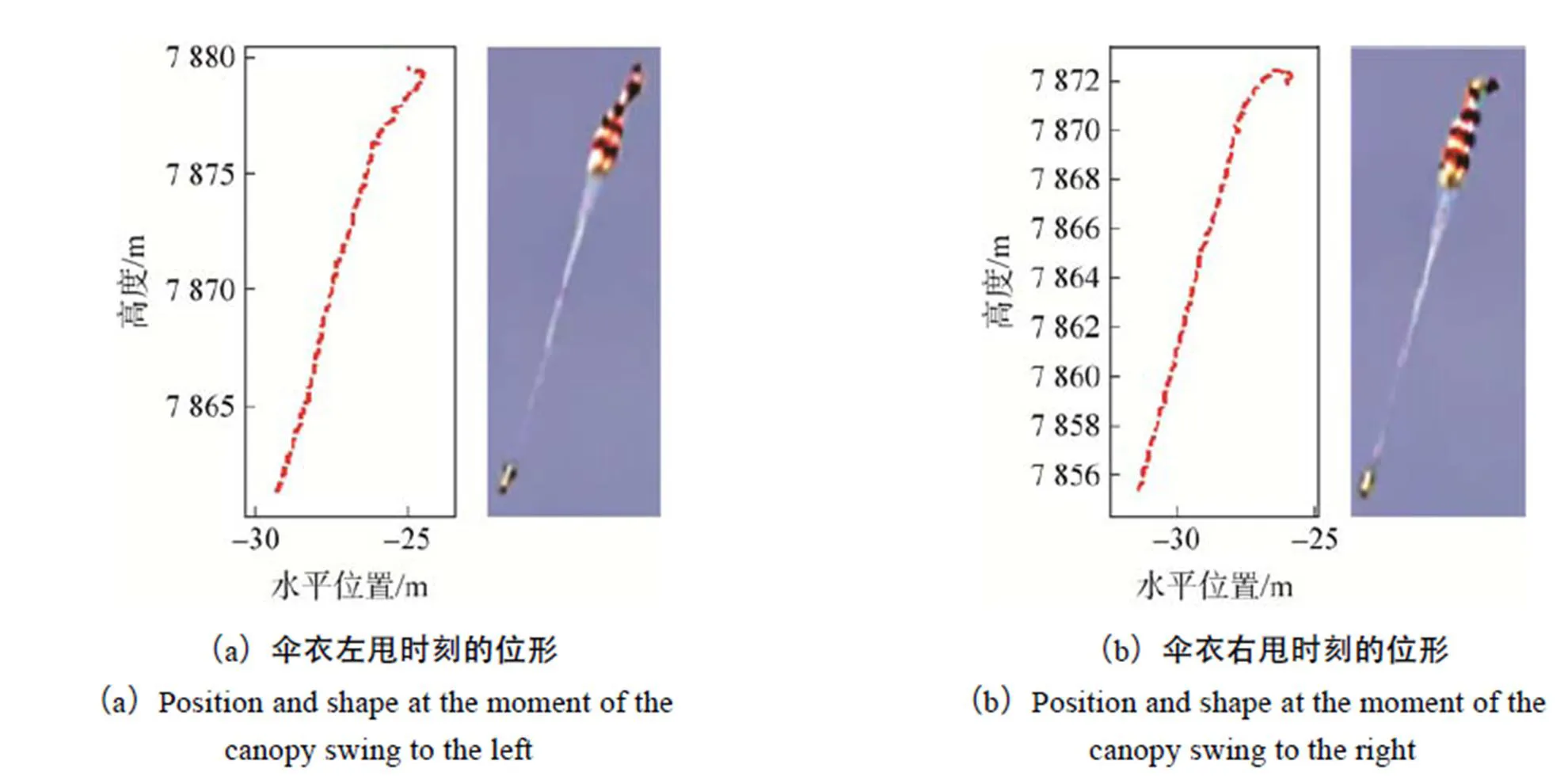
图5 仿真结果与空投录像的对比
3 仿真结果与分析
双引导减速伞与单引导减速伞的区别在于双引导结构可以根据动压环境选择大、小引导伞来拉直减速伞,提高拉直过程的安全性。
本文以某型号飞船回收着陆系统中双引导载人减速伞为例进行仿真分析,具体结构如图6所示。根据上述建模方法,大引导伞总长度约5.2m,划分为13个单元;小引导伞总长度约13.0m,划分为26个单元;减速伞为17.7m,划分为34个单元。其中大引导伞名义面积4.25m2,小引导伞为0.7m2,大小引导伞之间限力连接带带额定载荷为7.35kN。该减速系统拉直初始条件如下:返回舱高度11km,弹道倾角56°,攻角–20°,伞舱盖弹射分离速度22m/s,返回舱的动压在1~10kPa之间取值。
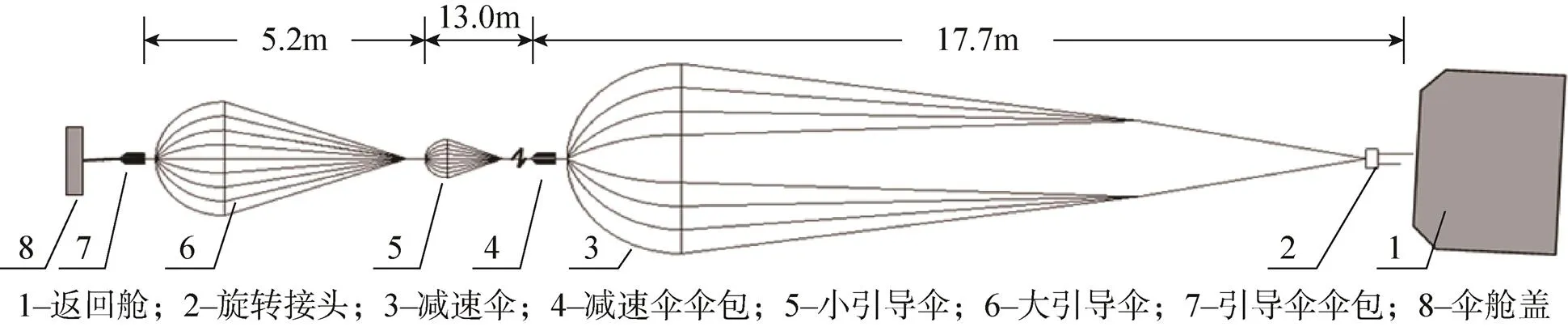
图6 双引导减速伞的结构示意
图7为不同动压下减速伞系统的位形情况。图7(a)为10kPa动压下减速伞拉直过程的位形变化。其中0.336s之前是伞舱盖弹出拉出大小引导伞的过程,该过程中伞绳出现明显弯曲,即“绳帆”现象,而且随着大小引导伞的拉出这种现象更加严重,这不利于后续减速伞的充气;大小引导伞拉出之后,引导伞包和伞舱盖脱离,大引导伞展开并迅速拉直伞绳,如图7(a)中0.40s和0.42s所示;随着伞绳的拉直,大小引导伞之间的限力连接带受力超过额定载荷,大引导伞脱离,最后小引导伞展开拉出减速伞,如图7(a)中0.45~0.792s位形图所示。拉直过程持续0.792s,且减速伞在大小引导伞的作用下,逐渐被拉直,“绳帆”现象逐渐减弱。
图7(b)为2kPa动压下减速伞拉直过程的位形变化。该拉直过程动压较小,限力连接带受力没有超过额定载荷,减速伞在大引导伞的作用下拉直,拉直过程持续1.136s。
为了进一步研究双引导减速伞模型中大小引导伞工作的优势,本文针对相同情况下单引导减速伞(单引导伞面积1.8m2)的拉直过程作了比较。图8为两种引导伞在拉直过程中对于减速系统的拉力随时间的变化曲线,在引导伞展开之前,两者的拉力基本一致,但是引导伞工作之后,拉力相差比较明显。图8(a)为高动压情况,其中单引导伞拉力达到11.7kN,而双引导伞的拉力峰值仅为6.2kN。图8(b)为低动压情况,其中单引导伞拉力仅为2.6kN,而双引导伞的拉力峰值达到4.3kN。可以看出,高动压情况下双引导伞对减速系统拉力小,伞绳不易断裂,比较安全;低动压情况下双引导减速伞拉力大,可以更有效的拉出减速伞。
本文通过仿真计算,研究了不同动压下单、双引导伞拉直减速伞的规律。图9是不同动压下减速伞的拉直时间曲线。可以发现,单引导减速伞的拉直时间基本是随着动压的增大而减小,而双引导减速伞的拉直时间曲线在3.5kPa左右存在一个阶跃。这是因为在3.5kPa左右,大引导伞展开后限力连接带的最大拉力c大于其额定拉力7.35kN,限力连接断裂,大引导伞脱离,小引导伞拉直减速伞,导致拉直时间增加。比较两种减速伞的拉直时间曲线发现,当动压小于3.5kPa时,双引导伞拉直减速伞,拉直时间短,效率高;当动压大于3.5kPa时,双引导减速伞拉直过程时间略长于单引导伞,但拉直时间保持在1.15s以下。
图10为不同动压下引导伞对减速伞的拉力峰值曲线。可以发现,单引导减速伞中引导伞拉力峰值随着动压的增加不断增大,出现了低动压拉力小,高动压拉力过大的情况。而双引导伞在1~4kPa和6~10kPa区间内的拉力峰值也是随着动压增加而增大,但是相对单引导伞,在低动压时,大引导伞拉直减速伞拉力大,可以确保减速伞顺利拉出;高动压时,小引导伞拉直减速伞,可以确保拉直力在合理范围内。当动压为1~3.4kPa时,双引导伞拉力峰值均是在大引导伞工作时取得;当动压为3.5~4kPa时,大引导伞工作后脱离,但是拉力峰值在大引导伞从展开到脱离这段时间内已经取得;当动压为6~10kPa时,大引导伞迅速脱离,拉力峰值是在小引导伞工作后取得,所以6kPa时候的拉力峰值小于4kPa,拉力峰值曲线在4~6kPa之间出现过渡。
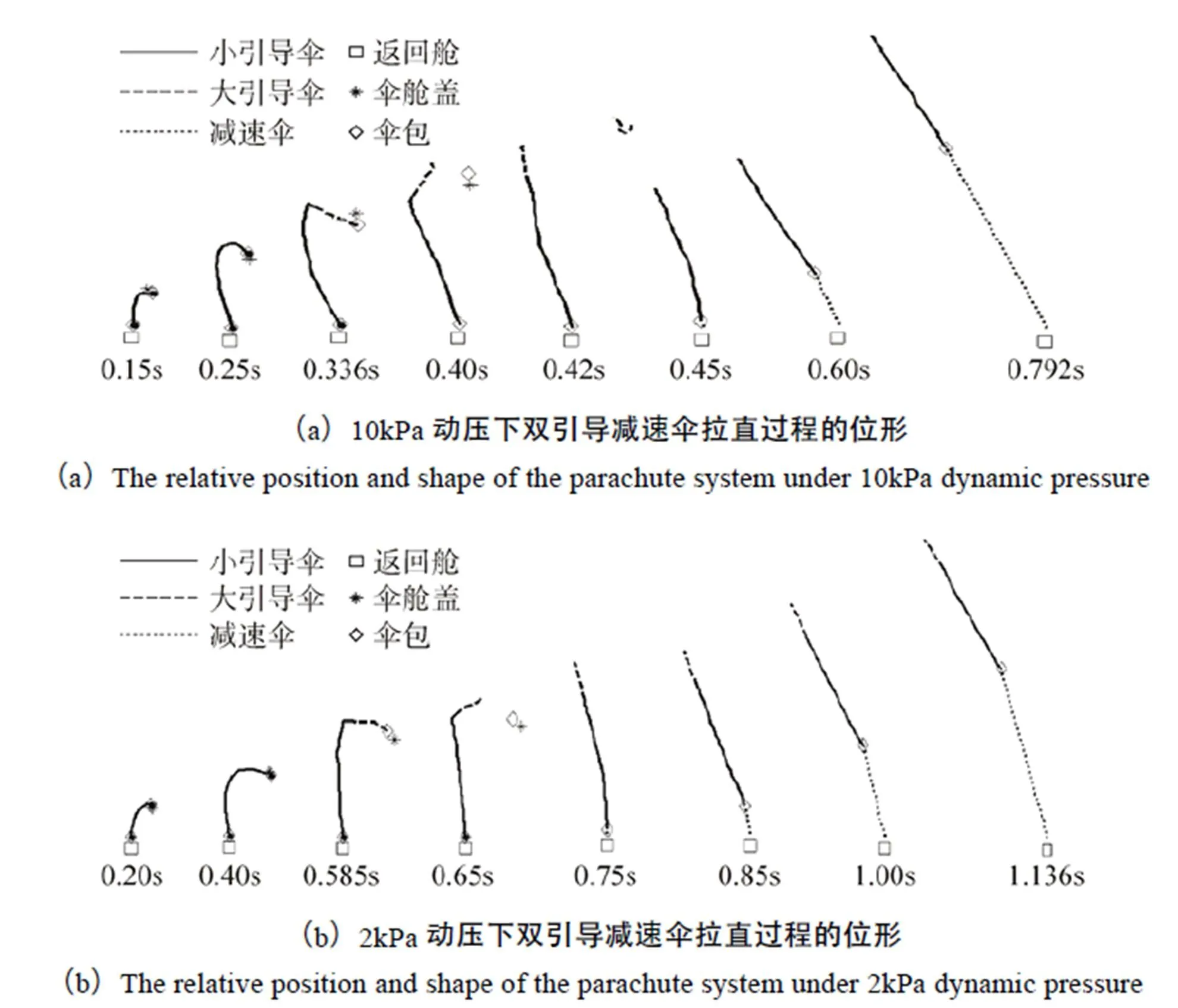
图7 不同时刻减速伞系统的位形
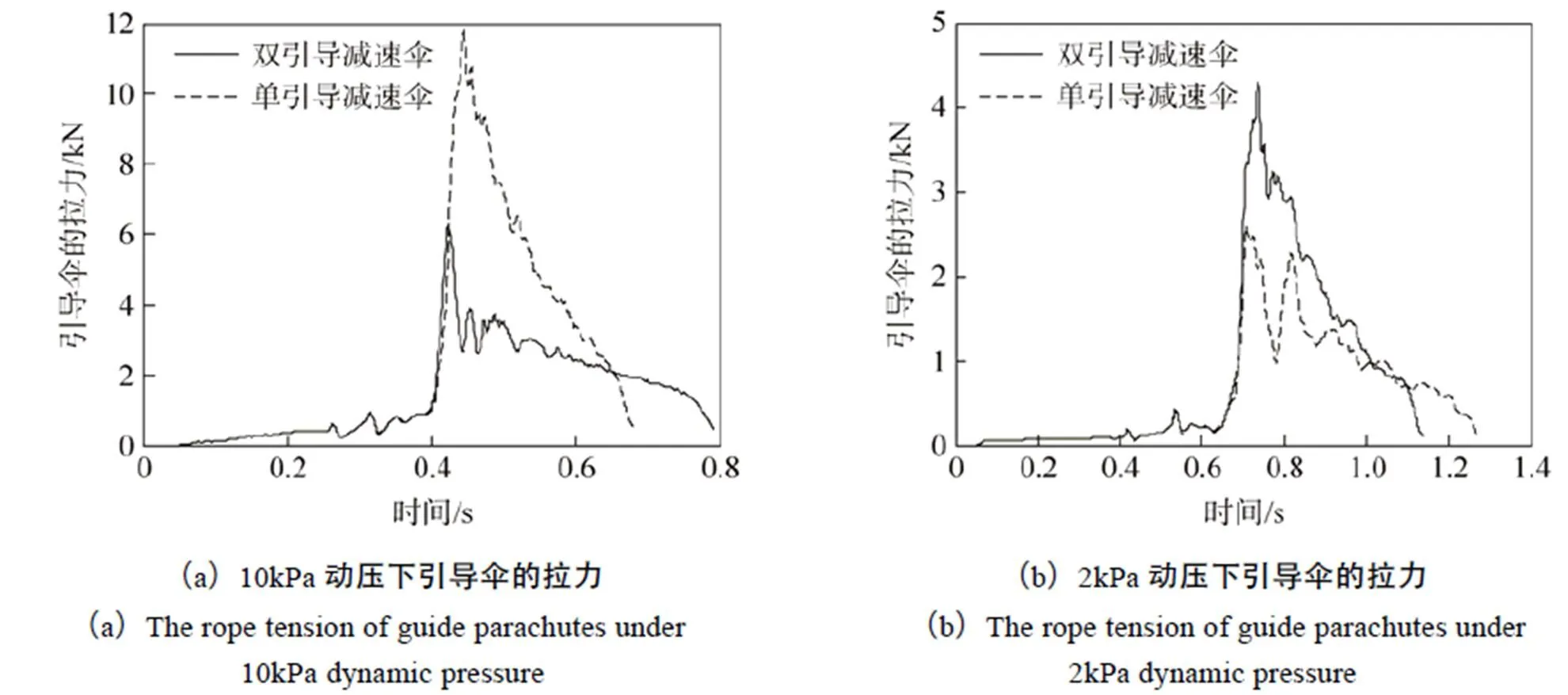
图8 不同引导伞对于减速系统的拉力

图9 不同动压下减速伞的拉直时间
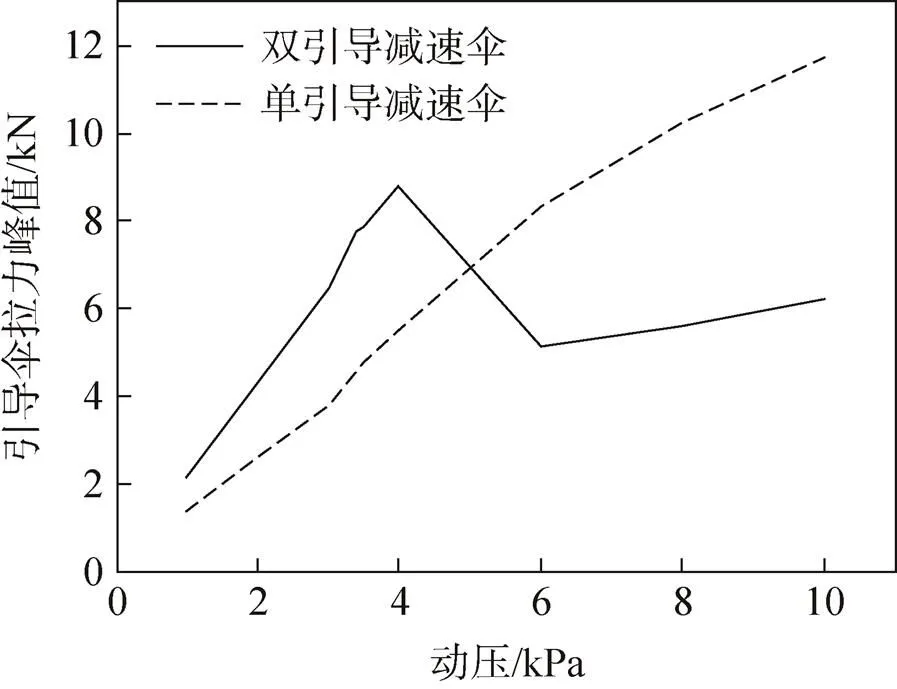
图10 不同动压下引导伞的拉力峰值
4 结束语
本文建立了双引导载人减速伞的动力学模型,并以某型号航天器回收着陆过程中的双引导减速伞为对象,研究了不同动压下双引导伞的拉直过程,并与相同情况下单引导减速伞拉直过程的拉力进行了对比。仿真结果表明:双引导结构可以适应不同动压,能够安全拉出减速伞;与单引导结构相比,双引导结构在低动压下拉力大,拉出时间短,高动压时拉力小,伞绳不易损坏,更加安全。该结论对回收着陆过程中减速伞结构的选择和设计具有重要的参考价值。
[1] 王利荣. 降落伞理论与应用[M]. 北京: 宇航出版社, 1997. WANG Lirong. Theory and Application of Parachute[M]. Beijing: China Astronautics Publishing House, 1997. (in Chinese)
[2] MCVEY D F, WOLF D F. Analysis of Deployment and Inflation of Large Ribbon Parachute[J]. Journal of Aircraft, 1973, 11(2): 96-103.
[3] SPAHR H, WOLF D F. Theoretical Analysis of Wake-induced Parachute Collapse[C]//AIAA 7th Aerodynamic Decelerator and Balloon Technology Conference. San Diego, California, 1981: 21-23.
[4] MOOG R. Aerodynamic Line Bowing during Parachute Deployment[C]//Aerodynamic Deceleration Systems Conference. 2013.
[5] PURVIS J. Prediction of Line Sail during Lines-first Deployment[J]. Aiaa Journal, 2013.
[6] PURVIS J W. Numerical Prediction of Deployment, Initial Fill, and Inflation of Parachute Canopies[J]. Parachutes, 1984.
[7] PURVIS J. Improved Prediction of Parachute Line Sail during Lines-first Deployment[C]//8 Aiaa Aerodynamic Decelerator & Balloon Technology Conference. AIAA. 1984.
[8] PETERSON C W. High Performance Parachutes[J]. Scientific Americans, 1990, 262(5): 108-116.
[9] 张青斌, 程文科, 彭勇, 等. 降落伞拉直过程的多刚体模型[J]. 中国空间科学技术, 2003, 23(2): 45-50. ZHANG Qingbin, CHENG Wenke, PENG Yong, et al. A Multi-rigid-body Model of Parachute Deployment[J]. Chinese Space Science and Technology. 2003, 23(2): 45-50. (in Chinese)
[10] 张青斌, 彭勇, 程文科, 等. 降落伞拉直过程的质量阻尼弹簧模型[J]. 弹道学报, 2003, 15(1): 31-36. ZHAN Qingbin, PENG Yong, CHENG Wenke, et al. A Mass Spring Damper Model of Parachute Deployment[J]. Journal of Ballistics, 2003, 15(1): 31-36. (in Chinese)
[11] 夏刚, 秦子增, 张晓今, 等. “绳帆”现象及其对开伞过程的影响[J]. 航天返回与遥感, 2001, 22(4): 1-5. XIA Gang, QIN Zizeng, ZHANG Xiaojin, et al. “Line Sail” and Its Influences on Deployment Performance of Parachute System[J]. Spacecraft Recovery and Remote Sensing, 2001, 22(4): 1-5. (in Chinese)
[12] 宋旭民, 范丽, 秦子增. 大型降落伞开伞过程中的“抽鞭”现象[J]. 航天返回与遥感, 2009, 30(3): 16-21. SONG Xumin, FAN Li, QIN Zizeng. “Vent Whip” During Large Parachute Deployment[J]. Spacecraft Recovery and Remote Sensing, 2009, 30(3): 16-21. (in Chinese)
[13] 郭鹏. 大型降落伞开伞过程研究[D]. 长沙: 国防科学技术大学, 2012. GUO Peng. Research on the Opening Process of Large Parachute System[D]. Changsha: National University of Defense Technology, 2012. (in Chinese)
[14] 王海涛, 秦子增, 宋旭民, 等. 大型降落伞拉直过程中的抽打现象分析[J]. 国防科技大学学报, 2010, 32(5): 34-38. WANG Haitao, QIN Zizeng, SONG Xumin, et al. Analysis of Phenomenon of Bull Whip-ping in the Deployment Process of Large Parachute[J]. Journal of National University of Defense Technology, 2010, 32(5): 34-38. (in Chinese)
[15] 王海涛, 秦子增, 宋旭民. 牵顶伞对大型降落伞拉直过程的影响分析[J]. 国防科技大学学报, 2010, 32(4): 49-55. WANG Haitao, QIN Zizeng, SONG Xumin. Effects of the Attached Apex Drogue on Phenomenon of Bull Whipping in the Deployment Process of Large Parachute[J]. Journal of National University of Defense Technology, 2010, 32(4): 49-55. (in Chinese)
[16] 余莉, 史献林, 袁文明. 牵顶伞在降落伞拉直过程中的作用[J]. 南京航空航天大学学报, 2009, 41(2): 198-201. YU Li, SHI Xianlin, YUAN Wenming. Effects of Parachute Deployment Using Attached Apex Drogue[J]. Journal of Nanjing University of Aeronautics& Astronautics, 2009, 41(2): 198-201. (in Chinese)
[17] 王海涛, 程文科. 考虑尾流影响的降落伞弹射拉直过程研究[J]. 航天返回与遥感, 2016, 38(5): 3-9.WANG Haitao, CHENG Wenke. Research on Ejecting and Deploying Process of Parachute Considering Wake Flow Effects[J]. Spacecraft Recovery and Remote Sensing, 2016, 38(5): 3-9. (in Chinese)
[18] GAO Shuyi, WANG Haitao, CHENG Wenke. The Parachute Container Cover Ejection Separation Characteristic Analysis of Return Capsule for Lunar Exploration[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2014, 31(5): 552-558.
[19] 鲁媛媛, 荣伟, 吴世通. 火星环境下降落伞拉直过程的动力学建模[J]. 航天返回与遥感, 2014, 35(1): 29-36. LU Yuanyuan, RONG Wei, WU Shitong. Dynamic Modeling of Parachute Deployment in Mars Environment[J]. Spacecraft Recovery and Remote Sensing, 2014, 35(1): 29-36. (in Chinese)
[20] 鲁媛媛, 荣伟, 吴世通. 火星探测器降落伞拉直过程中的“绳帆”现象研究[J]. 宇航学报, 2014, 35(11): 1238-1244. LU Yuanyuan, RONG Wei, WU Shitong. Study on Line Sail during Mars Probe Parachute Deployment[J]. Journal of Astronautics, 2014, 35(11): 1238-1244. (in Chinese)
Numerical Simulation of Double-guided Parachute Deployment under Different Dynamic Pressure
ZHANG Mingliang GAO Puyun CHENG Wenke YUE Jian
(College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China)
The process of parachute deployment is an important phase of the return capsule recovery and landing work process. Single and double guided structures can deploy the parachute, but two structures are different, deployment effect is also different. The double-guided parachute is an optimization design based on single-guided structure. It is relalively complicated, but it can be deployed under different dynamic pressure, which is more secure and reliable than the single one. The paper has carried on the research to this problem. First, a dynamic analysis model of the double-guided parachute deployment is developed based on the spring mass damping principle. The numerical simulations of the parachute deployment process are carried out under different dynamic pressure from low to high. Then, the deployment processes under high and low dynamic pressure are selected and analyzed to study the working principle of the double-guided parachute, and compared with the single-guided parachute. Finally, the effect of dynamic pressure on the process single and double guided parachute is studied from the deployment time and the tension of the guide structure. The result shows that the double-guided parachute can deploy successfully under different dynamic pressure. when the dynamic pressure is low, the tension is bigger and the deployment time is shorter than the single-guided structure. When the dynamic pressure is high, the tension is smaller and the structure will be more secure. The conclusion can provide important reference value for selection and design of the parachute structure during recovery and landing.
single-guided structure; double-guided parachute; process of parachute deployment; numerical simulation; dynamic pressure; recovery and landing
V445.23
A
1009-8518(2018)05-00010-08
10.3969/j.issn.1009-8518.2018.05.002
张明亮,男,生于1989年,国防科技大学力学博士生。研究方向为非线性系统动力学。E-mail:haizhilan0106@126.com。
2018-01-04
(编辑:刘颖)
猜你喜欢
散文诗世界(2021年7期)2021-08-03
祝您健康(2020年10期)2020-10-12
作文·小学低年级(2020年8期)2020-10-09
表面工程与再制造(2019年3期)2019-09-18
小溪流(画刊)(2017年11期)2018-01-09
创新作文(1-2年级)(2016年12期)2016-12-26
电子技术与软件工程(2016年20期)2016-12-21
中国高新技术企业(2015年28期)2015-07-21
高中生·青春励志(2014年11期)2014-11-25
数学教学通讯·小学版(2014年3期)2014-04-02
