
基于模糊免疫PID算法的烘缸冷凝水排放差压控制
2018-11-15 11:47佟永亮孙小乐
中国造纸 2018年10期
汤 伟 王 帅,* 佟永亮 孙小乐
(1.陕西科技大学电气与信息工程学院,陕西西安,710021;2.陕西科技大学机电工程学院,陕西西安,710021)
纸幅干燥是造纸过程中非常重要的环节,决定最终成纸的质量。纸机干燥部消耗的热能是2.85~4.85 GJ/t,占造纸过程总能耗的65%[1]。其中,烘缸严重积水是导致干燥部能耗较高原因之一,有效排出烘缸积水就显得尤为重要。研究表明[2],将烘缸冷凝水排放差压稳定在合适的范围内能有效排出烘缸积水。烘缸冷凝水排放差压控制直接影响蒸汽进汽量以及二次蒸汽回收利用的效率,同时它对成纸质量也产生重要影响。因此,烘缸冷凝水排放差压的控制是节能降耗[3]、保证纸张质量的关键。
烘缸冷凝水排放差压产生的原因主要有两点:一是烘缸内虹吸管的作用,使得烘缸内的冷凝水带着不凝气体排出,产生了烘缸冷凝水排放差压;二是热泵对闪蒸罐内部的二次蒸汽抽吸作用,导致烘缸出口处的压力降低。纸机干燥部烘缸冷凝水排放差压控制一般采用PID算法,但PID算法是将差压稳定在一个具体数值[4],而烘缸排水的非均匀性导致烘缸冷凝水排放差压处于波动状态,需要将差压稳定在合适范围之内,故PID算法很难满足控制要求。针对PID算法的缺点,孟德志等人[5]和汤伟等人[6]将模糊PID算法应用到烘缸差压控制中,但它不具备自主学习能力,对噪声等干扰引起的参数变化存在一定的适应限度。本课题把模糊控制的非线性作用[7]与生物免疫系统极强的自适应性相结合,针对烘缸冷凝水排放差压控制设计了一种基于模糊免疫PID算法的控制方案,通过控制热泵开度达到对烘缸冷凝水排放差压控制的目的,使烘缸长期处于不积水状态,从而降低能耗,提高成纸质量。
1 烘缸冷凝水排放差压控制原理
纸机干燥部烘缸冷凝水排放差压控制原理如图1所示。由图1可知,主要设备有烘缸、进汽阀、排汽阀、闪蒸罐、热泵等。
在烘缸供汽系统中,新鲜蒸汽通过进汽阀进入烘缸使烘缸温度上升,湿纸幅通过与烘缸接触进行加热。蒸汽进入烘缸后大部分通过热交换变成了冷凝水,部分未冷凝蒸汽与冷凝水形成汽水混合体,在差压的作用下通过虹吸管排到闪蒸罐内。新鲜蒸汽作为流量调节热泵动力源,与闪蒸罐中的二次蒸汽混合后进入烘缸,实现蒸汽的循环利用,而闪蒸罐内的冷凝水送至锅炉房。根据现场经验,通过对热泵进行调节,使烘缸冷凝水排放差压维持在30~50 kPa范围内,烘缸具有最佳工作效果。若差压低于30 kPa,烘缸内部将会积水,影响烘缸干燥效率,导致纸幅干燥不均匀;若差压高于50 kPa,进入烘缸的蒸汽还未进行热交换就直接排出烘缸,将会增加蒸汽用量,造成能源的浪费。模糊免疫PID算法既有“模糊”思想,将烘缸冷凝水排放差压值分为几种不同区段,进行模糊化;同时该算法又结合免疫反馈的较强的自适应性,在线调整PID参数,控制热泵的开度,从而稳定烘缸冷凝水排放差压。

图1 烘缸冷凝水排放差压控制原理图
2 模糊免疫PID算法
2.1免疫反馈机理
免疫是指机体免疫系统识别自身与异己物质,并通过免疫应答排除抗原性异物,以维持机体生理平衡的功能。人体内共三道免疫防线,前两道防线是人类天生具有的,不具有识别特定抗原的能力,因此称为非特异性免疫;第三道防线是后天形成的,能够识别特定的抗原,又称为特异性免疫。特异性免疫又分为细胞免疫和体液免疫,本课题借鉴体液免疫反馈原理,免疫反馈原理如图2所示[8]。

图2 体液免疫调节原理图
由图2可知,反应初期,抗原浓度较高,抗原呈递细胞将抗原呈递给T细胞(包括辅助TH细胞和抑制TS细胞),活化TH细胞和少量TS细胞,TH细胞刺激B细胞,B细胞进行增殖、分化,进一步产生抗体,抗体与抗原进行结合,形成细胞团或沉淀,进而被吞噬细胞消化。随着反应的进行,抗体浓度上升,抗原浓度降低,此时TS细胞增多,对TH细胞和B细胞产生抑制作用(为简化模型,这里将抑制作用只体现在B细胞上),抗体浓度也进一步降低,使机体处于稳定状态。
基于以上免疫反馈原理,可以得到免疫反馈的基本模型:假设第k代抗原的数目为ε(k),TH细胞对B细胞的正刺激记为TH(k),TS细胞对B细胞的负刺激记为TS(k);B细胞受到的总刺激记为S(k),可得公式(1)。
(1)
式中,K1是TH细胞的促进因子;K2是TS细胞的抑制因子;f(S(k),ΔS(k))是非线性函数,表示对T细胞抑制量的大小。由式(1)可得B细胞接受的总刺激为:
S(k)=K(1-ηf(S(k),ΔS(k)))ε(k)
(2)
式中,K=K1,表示响应速度;η=K1/K2,表示稳定效果,合理地调整K和η,能使系统有较快的响应速度和较小的超调量。
免疫反应的目的是在保证免疫系统稳定的同时,能够快速对抗原做出免疫反应。一方面消除抗原对人体的危害,另一方面控制抗体浓度不能过高,否则也会对人体产生危害。控制系统在调节过程中,在保证系统稳定的前提下快速消除误差,这点与免疫系统不谋而合,二者对比如表1所示。

表1 控制系统与免疫系统
将表1中的e(k)、u(k)分别代替公式(2)中的ε(k)、S(k),可得公式(3)。
u(k)=KP1e(k)
(3)
式中,KP1=K(1-ηf(u(k),Δu(k)))。根据免疫反馈机理推导出非线性比例控制算法,比例系数随输出的变化而变化,可以用于调节控制器的比例系数,增强系统的自适应能力。
2.2非线性函数f(u(k),Δu(k))的确定
模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种控制方法。函数f(u(k),Δu(k))是非线性函数,模糊控制器是一个万能逼近器[9],因此可用模糊控制器来构造该函数。
模糊控制器的输入[10- 11]为控制器的输出u(k)、输出变化量Δu(k);输出为非线性函数f(u(k),Δu(k))。根据实际控制量的变化来看,u(k)论域设定为[-1,1],分为3个模糊子集“负(N)”、“零(Z)”和“正(P)”;Δu(k)论域设定为[-1,1],分为两个模糊子集“负(N)”和“正(P)”;输出变量f(u(k),Δu(k))论域设定为[-1,1],分为3个模糊子集“负(N)”、“零(Z)”和“正(P)”。输入变量(u(k)以及变化量Δu(k))和输出变量f(u(k),Δu(k))的隶属函数分别如图3、图4、图5所示。模糊控制器的模糊推理选择Mamdani推理法[12- 13],解模糊选择Centroid重心法。

图3 输入变量u(k)的隶属函数图

图4 输入变量Δu(k)的隶属函数图

图5 输出变量f(u(k),Δu(k))的隶属函数图
根据“细胞接受的刺激越强/弱,那么抑制能力就越弱/强”的原则,可以得出f(u(k),Δu(k))模糊控制规则如表2所示。
2.3模糊控制对积分系数、微分系数的整定
为近一步增强参数对系统的适应性,采用模糊控制的方法在线调整积分系数和微分系数,模糊控制实时调整的两个参数表达式如公式(4)所示。
(4)
式中,KI为积分系数;KD为微分系数;KI0和KD0为控制器初始参数;ΔKI和ΔKD是模糊控制输出变量。
该模糊控制器为两输入两输出模糊控制器,输入变量为误差e和Δe,输出变量为积分数的增量ΔKI和ΔKD。根据误差e和误差变化量Δe的实际情况,两个输入变量的论域为[-3,3],分为7个模糊子集“负大(NB)”、“负中(NM)”、“负小(NS)”、“零(Z)”、“正小(PS)”、“正中(PM)”和“正大(PB)”。根据ΔKI和ΔKD的实际变化范围,分别将其论域设定为[-0.3,0.3],划分的7个模糊子集与前者相同。变量的论域和实际输入输出的关系通过量化因子Ke、Kec和比例因子Ku进行调节。输入变量(e以及Δe)和输出变量(ΔKI和ΔKD)的隶属函数如图6、图7所示。

图6 输入变量e和Δe的隶属函数

图7 输出变量ΔKI和ΔKD隶属函数
模糊控制器的模糊推理选择Mamdani推理法,解模糊选择Centroid重心法。模糊控制器两个输入变量均含有7个模糊子集,故一共有49条控制规则,根据人工调节经验得ΔKI和ΔKD控制规则[14- 15]如表3、表4所示。

表3 ΔKI控制规则表

表4 ΔKD控制规则表
常规PID算法的离散形式为式(5)。
(5)
式中,KP为比例系数;KI为积分系数;KD为微分系数;z表示离散化。
根据免疫反馈机理和模糊控制原理,结合公式(3)、公式(4)、公式(5)可得模糊免疫PID算法的表达式如公式(6)所示,且模糊免疫PID算法结构图如图8所示。
(6)
式中,KP1=K1(1-ηf(u(k),Δu(k)));KI=KI0+ΔKI;KD=KD0+ΔKD。
3 仿真模拟及实际应用结果
在MATLA中编写.m程序,进行仿真实验。烘缸冷凝水排放差压控制的数学模型,如公式(7)所示。
(7)
式中,G(s)为被控对象传递函数;s为拉式因子;e为常量。

图8 模糊免疫PID算法结构图
作为对比实验,同时对PID算法和模糊PID算法进行仿真。针对PID算法,根据Z-N法整定出一组PID参数:KP=0.89、KI=0.17、KD=1.02;针对模糊PID算法,参数初始值设定为:KP=0.89、KI0=0.17、KD0=1.02,根据论域和实际输出值,确定量化因子:Ke=3、Kec=3;确定比例因子:Ku1=0.1、Ku2=1。针对模糊免疫PID算法,根据经验法得免疫控制参数:K=1.1、η=0.4;积分系数初始值:KI0=0.17;微分系数初始值:KD0=1.02。
3.1设定值跟踪性能比较
系统在PID算法、模糊PID算法、模糊免疫PID算法下,分别加入阶跃信号,发生阶跃响应的系统动态性能指标如表5所示。由于在实际应用中,不可避免的有干扰存在,因此在时间为100 s时,分别对三种算法下的系统加入阶跃扰动后的系统动态指标如表6所示;仿真曲线如图9所示。

表5 阶跃响应下三种算法的系统动态性能指标

表6 阶跃扰动下三种算法的系统动态性能指标
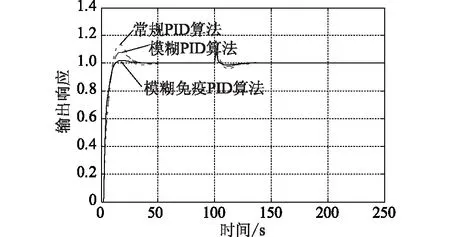
图9 阶跃响应及阶跃扰动下三种算法的系统响应曲线
由表5可知,与常规PID算法和模糊PID算法相比,基于模糊免疫PID算法的系统无超调量,调整时间最短,为46.5 s。这表明基于模糊免疫PID算法的系统响应速度最快、跟踪性能最好。
由表6可知,在加入阶跃扰动的情况下,与常规PID算法和模糊PID算法相比,基于模糊免疫PID算法的系统超调量还是最小,仅为7.46%,波动时间最短,仅为30 s,这说明基于模糊免疫PID算法的系统抗干扰性能最好。
3.2鲁棒性能比较
由于实际生产中的工艺参数会受到干扰或噪声等影响,因此,数学模型可能会失配。假设原先的数学模型,即公式(7)失配,那么,此时烘缸冷凝水排放差压控制的数学模型为公式(8)所示。
(8)
式中,G(s)为被控对象传递函数;s为拉式因子;e为常量。
在数学模型失配的情况下,分别对三种算法的系统加入阶跃信号,发生阶跃响应的系统动态性能指标如表7所示。同样,当时间为100 s时加入阶跃扰动,得到模型失配下三种算法的系统的动态性能指如表8所示;仿真曲线如图10所示。

表7 模型失配时阶跃响应下三种算法的系统动态性能指标

表8 模型失配时阶跃扰动下三种算法的系统动态性能指标

图10 模型失配下三种算法的系统响应曲线
由表7可知,在数学模型失配的情况下,与常规PID算法和模糊PID算法相比,基于模糊免疫PID算法的系统超调量最小,仅为2.9%,调整时间最短,仅为48 s,说明基于模糊免疫PID算法的系统具有很好的自适应力和参数调整能力。
由表8可知,在数学模型失配及加入阶跃扰动时,与常规PID算法和模糊PID算法相比,基于模糊免疫PID算法的系统响应超调量也最小,仅为7.6%,波动时间最短,仅为39 s,说明基于模糊免疫PID算法的系统在被控对象模型失配下能够更好地抑制干扰。综上所述,从设定值跟踪性能、抗干扰性及鲁棒性能三方面分析可得出,相对于常规PID算法及模糊PID算法,基于模糊免疫PID算法的系统控制效果最好。
3.3实际应用效果
本课题基于上述提出的模糊免疫PID算法设计了一种控制方案,目前已试用于河北保定某纸厂生产线。从该厂纸机的WinCC画面截取的烘缸冷凝水排放差压历史变化曲线如图11所示,选择时间为30 min时,曲线运行共计1800个采样点。由图11可以看出,该控制方案在实际应用中令烘缸冷凝水排放差压维持在30~40 kPa之间,运行效果良好。
一般来说,如果纸机烘缸表面横幅温度测量点差值在10~15 ℃或更多,认为烘缸可能存在积水。本课题利用红外测温仪测得该纸厂纸机的烘缸表面横幅温度如表9所示。由表9可知,烘缸表面横幅温度差值在5 ℃以内,这表明烘缸不存在积水。

表9 烘缸表面横幅温度表

图11 上位机WinCC烘缸冷凝水排放差压历史变化曲线
另外,根据实际生产计算得知,该纸厂的吨纸蒸汽消耗量由1.32 t/h下降到1.2 t/h,下降了约9.09%。这表明对每小时产量为12 t的造纸企业来说,若每天生产时间为23 h,每吨蒸汽按100元计算,1年可节约成本120.8万元。
因此,本课题提出的基于模糊免疫PID算法的控制方案是行之有效的,能确保烘缸冷凝水排放差压稳定在工艺允许范围之内,且烘缸处于不积水状态,降低了蒸汽能耗。
4 结 论
根据生物免疫系统反馈机理以及模糊控制推导模糊免疫PID算法表达式及结构图,并基于MATLAB的.m程序对该算法进行仿真模拟。仿真结果表明,基于模糊免疫PID算法的控制系统无超调量,调整时间为46.5 s;当加阶跃扰动时,其超调量为7.46%,波动时间为30 s;当模型失配时,其超调量为2.9%,调整时间为48 s;当模型失配并加入阶跃扰动时,其超调量7.6%,波动时间为39 s。实际应用结果表明,使用基于模糊免疫PID算法的烘缸凝水排放差压被控制在工艺允许范围30~50 kPa,吨纸蒸汽量消耗量节约了9.09%,烘缸处于不积水状态。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
仪器仪表用户(2022年1期)2022-01-19
国际医学放射学杂志(2021年3期)2021-11-30
电子制作(2021年11期)2021-06-17
探索科学(学术版)(2020年3期)2021-01-14
建材发展导向(2020年1期)2020-11-26
天津冶金(2020年4期)2020-08-18
黑龙江科学(2020年8期)2020-01-17
河北农机(2020年10期)2020-01-08
建材发展导向(2019年10期)2019-08-24
