基于降维负载转矩观测器的调速系统控制技术研究
2018-11-21 03:34邹志勤霍希建
导航定位与授时 2018年6期
洋 婷,黄 建,王 贯,邹志勤,霍希建
(北京自动化控制设备研究所,北京 100074)
0 引言
未来飞行器要求具有空间结构紧凑、飞行速度快、作战半径大、突防能力强、攻击精度高、作战效能大的特点,电动燃油调速系统作为飞行器发动机的关键设备,其性能直接决定飞行器系统的动态品质与可靠性[1]。随着多电和全电燃气涡轮发动机的快速发展,出现了使用电动机提供动力的电动齿轮燃油泵[2]。通过直接控制电机控制器得到可以调节的电机转速,再通过电机带动齿轮泵同步旋转为发动机泵油,从而使得发动机需油规律与燃油泵供油规律相匹配,极大地提高了电动燃油泵的系统效率。高性能飞行器的发动机对燃油流量变化有严格的要求,这就要求在负载变化的情况下,高速段电机的转速跳变不能超过1.5%,负载扰动不仅对永磁同步电机稳速精度有影响,而且影响着整个控制系统的动态性能和稳定性等关键指标[3-4],传统的比例积分导数(Proportion-Integral-Derivate, PID)控制算法已经不能满足当前飞行器性能要求。
针对抗负载扰动的问题,文献[5]提出了引入负载转矩的前馈补偿,转换成两自由度控制系统,但是直接测量负载转矩,会增加系统成本,并且仪器精度和响应速度都会影响负载转矩的测量。受飞行器空间结构的限制,采用非接触式的状态观测器对负载转矩进行观测是一个很好的选择。目前负载转矩的观测主要有模型参考自适应法、滑模观测器法、卡尔曼滤波器法等[6-8],在处理器系统小型集成化条件下,运算量与控制效果没有实现最优化,尤其是多同步电机集成控制系统。本文结合矢量控制方法,研究了前馈补偿的控制策略,提出了一种基于降维负载转矩观测器的抗负载扰动控制方法。通过仿真和试验结果表明,在快速加载与卸载实验条件下所提出的方法的正确性与可行性。
1 永磁同步电机数学模型
高精度电动泵调速系统一般采用永磁同步电机,永磁同步电机具有转矩脉动小、调速精度高等特点。
1.1 永磁同步电机简化数学模型
由于电机在转动的过程中,定子绕组和转子磁极之间会产生相互影响,电磁关系十分复杂,所以很难直接建立永磁同步电机的精确数学模型。为方便数学模型的推导,便需要忽略掉一些影响小的次要因素,在电机建模时进行了理想化近似[9]:
1)忽略三相电流产生高次谐波对磁势的影响;
2)忽略磁滞效应造成的损耗,忽略涡流和铁芯的饱和情况;
3)忽略外界环境(如温度等)对电机参数(绕组电阻和电感)的影响,即电机参数固定不变;
4)忽略定子绕组和永磁体的阻尼作用。
1.2 坐标变换及d-q轴系下永磁同步电机数学模型
在A-B-C三相坐标系下,可由电压、磁链、转矩方程式共同构成永磁同步电动机数学模型。但要对电机控制机理进行分析,就必须对电机模型进行解耦。运用矢量变换原理,将A-B-C坐标下的数学模型先经过CLARK变换到α-β坐标系,再通过PARK变换到d-q坐标系。从而将三相静止坐标系下的iA、iB、iC三相电流,分解成为两相旋转坐标系下电流的转矩和励磁分量,解耦过程如图1所示。
在保证电机输出功率恒定的条件下,实现了电机数学模型的解耦简化,并且定子和转子磁动势相对恒定[10]。利用坐标变换原理,对电机的数学模型进行简化,电机数学模型经过CLARK和PARK两次坐标变换,转换到d-q坐标下,经过坐标变换后,在旋转两相坐标系下的数学模型为:
(1)
式中,Ud和Uq为定子电压分量;Rs为绕组的阻值;p为微分算子;ω为旋转角速度;ψq和ψd为交直轴磁链,为
(2)
式中,Ld和Lq为电枢电感;id和iq为定子电流分量;ψf代表转子磁链。
Te=np(ψdiq-ψqid)
(3)
式中,np代表电机极对数。
结合式(3)可得:
Te=np[ψfiq+(Ld-Lq)idiq]
(4)
对于旋转坐标系下的电机数学模型,由式(4)可以看出,电机转矩分为两部分,一部分为定子电流的转矩分量和磁链相互作用产生,另一部分为定子电流的励磁分量和转矩分量共同作用产生,两部分都和iq成正比,因此转矩大小和定子电流的转矩分量也为正比关系。同时,励磁分量id可以控制定子磁链,因此可利用它来削弱转子磁场。
此处选择id=0的控制方式,于是转矩方程可以简化为以下形式,转矩的变化只与q轴电流有关,这可以在转矩方程中实现id与iq的解耦,简化了控制算法。
Te=npψfiq
(5)
2 降阶状态观测器原理及设计
2.1 降阶状态观测器分析
考虑到系统的输出中已经包含有系统状态的部分信息,因此直接利用这部分信息可以构造出维数低于被估计系统的状态观测器[11]。设被估系统为n维线性定常系统,状态方程如下:
(6)
其中,A、B和C分别为n×n、n×r和m×n阶实矩阵,且假设(A,C)能观测,C为满秩矩阵。
任取(n-m)×n阶常阵R,使得n×n阶矩阵Q非奇异。
(7)
则有
(8)
(9)
由式(9)可导出
(10)
定义:
则可写为:
(11)

由此可推出降阶状态观测器的状态方程式为:
(12)
2.2 永磁同步电机转矩观测器设计
考虑到控制算法的采样速率足够高,在采样周期内可以认为负载转矩为恒定值,即dTl/dt=0。再根据永磁同步电机转矩方程式(13)及被控对象状态方程式(12),可推导永磁同步电机负载转矩观测器的状态方程如式(14):

(13)
(14)
于是上式可写为:
(15)
则永磁同步电机降阶负载转矩观测器的特征方程为:
(16)

假设期望出现的极点为α、β,那么目标特征方程为:
s2-(α+β)s+αβ=0
(17)
则由式(16)与式(17)可得
(18)
摩擦系数B忽略不计,则由式(15)可得:
(19)
由式(19)可构建出负载转矩观测器的框图,如图3所示,其中Kt为永磁同步电机的电磁转矩系数。以系统转速与q轴电流作为观测器的输入,经
过解算便能观测出转速与负载转矩,降阶的负载转矩观测器结构比较简单,编程易实现,具有一定的抗干扰性。
3 仿真分析
为验证降阶负载转矩观测器的有效性,本研究将负载转矩观测器与永磁同步电机矢量控制相结合,将负载转矩观测器的输出前馈到q轴电流的输入作为补偿,分析该方法的有效性。带负载转矩前馈补偿的永磁同步电机系统控制框图如图4所示,电机的相关参数如表1所示。
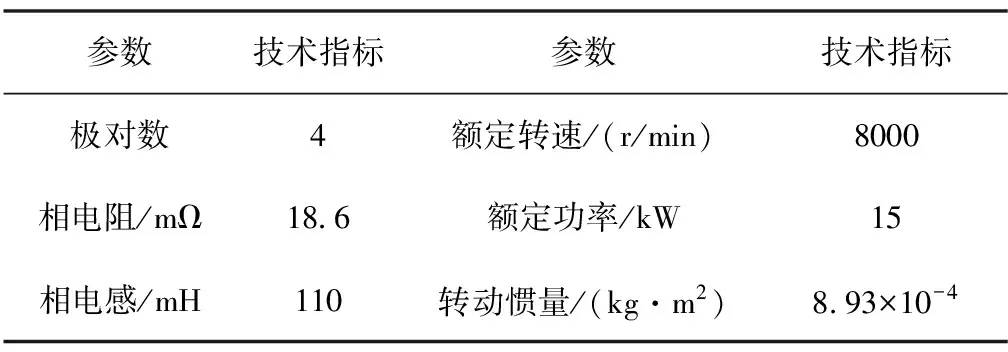
表1 电机仿真参数
仿真参数为:速度环Kp=0.45,速度环Ki=0.001,电流环Kp=0.3,电流环Ki=0.015;转矩观测器系数K1=-200000,K2=500000,反馈系数=0.022。首先进行电机启动性能仿真,结果如图5所示。由图5可知,未加负载转矩观测器时,给定8000r/min阶跃指令转速超调量为277r/min,加负载转矩观测器时转速超调量为0r/min,由此可知,负载转矩观测器能够有效抑制转速超调。
当负载突变时,对转速响应进行仿真分析,转速指令给定为8000r/min,在0.25s突增10N·m转矩,在0.3s突卸10N·m转矩,加转矩观测器与未加转矩观测器对应的转速响应如图6所示,负载突变时刻观测的负载转矩波形如图7所示。
由图6可知,未加入负载转矩前馈补偿时,在0.25s突加10N·m负载时,电机转速由8000r/min下降到7876r/min,转速波动为124r/min;在0.3s突卸10N·m负载时,转速由8000r/min上升到8131r/min,转速波动为131r/min;加入负载转矩前馈补偿后,在0.25s突加10N·m负载时,电机转速由8000r/min下降到7972r/min,转速波动为28r/min;在0.3s突卸10N·m负载时,转速由8000r/min上升到8037r/min,转速波动为37r/min;对比加入负载转矩前馈补偿前后曲线,绘制对比表格如表2所示。

表2 加入转矩前馈补偿前后仿真转速波动对比
4 实验验证
为了验证负载转矩观测器的与前馈补偿方案的可行性,基于DSP+FPGA微处理系统,搭建某同步电机驱动控制试验平台,时针主频300MHz,PWM开关周期16kHz,硬件如图8所示。
分别采用传统PI控制方式与带观测转矩前馈补偿的PI控制方式进行负载转矩突变实验,转速波动图如图9所示,负载转矩变化图如图10所示。
由图9与图10对比可知,在图9中t=3010s时由于负载突升引起转速下降,无观测转矩前馈补偿的曲线转速波动较大;图中t=3043s时由于负载突卸引起转速上升,同样的,无观测转矩前馈补偿的曲线转速波动较大。
由图11可知,当电机转速稳定在8000r/min时,突加10N·m负载(14s手动加载),在突加转矩过程中,无负载转矩观测的传统PI控制方式转速波动大约为-120r/min,有负载转矩观测并前馈补偿的PI控制方式转速波动大约为-80r/min;由图12可知,当电机转速稳定在8000r/min并且负载转矩稳定在10N·m时突卸负载(3s手动卸载),无负载转矩观测的传统PI控制方式转速波动大约为+440r/min,有负载转矩观测并前馈补偿的PI控制方式转速波动大约为+104r/min。
为实现基于降维负载转矩观测器的实时性与有效性,在同样的条件下,利用其他算法[12]进行比较,试验结果如表3所示。
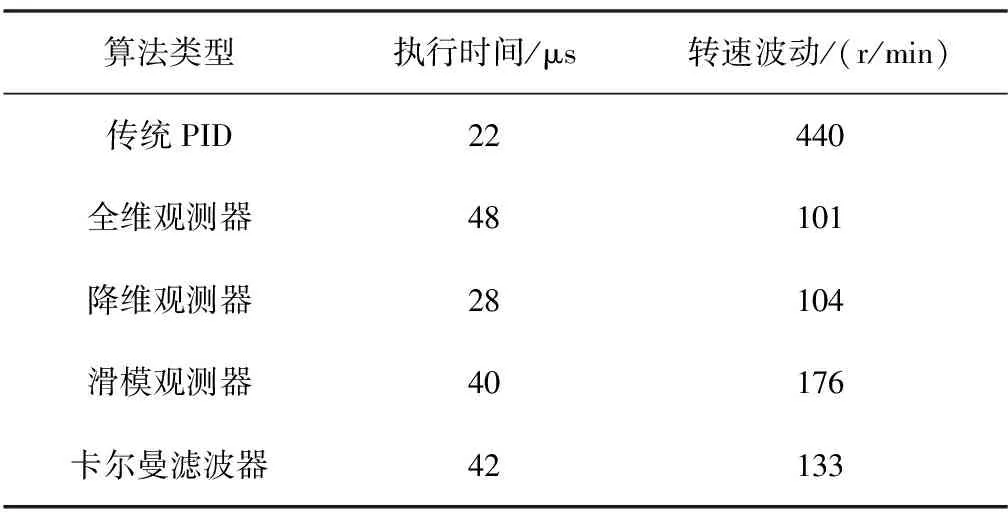
表3 不同算法下性能比较
由表3可以很明显地看出,基于降维负载转矩观测器和基于全维观测器的调速系统抗负载扰动能力强,但降维观测器法运算量小,既能满足性能要求,又能满足实时性要求。因此,要实现在硬件资源有限的条件下多同步电机驱动,降维观测器法比全维观测器法更具有优越性。
5 结论
本文根据降阶状态观测器原理,结合永磁同步电机数学模型,推导出了永磁同步电机负载转矩观测器模型,对高精度永磁同步电机调速系统抗扰性能进行了深入研究,得到以下2个结论:
1)针对高精度电动燃油调速系统在负载突变工作时燃油增压与燃油流量调节的稳定性问题,研究了负载突变情况下前馈补偿的控制策略,提出了一种基于降维负载转矩观测器的抗负载扰动控制方法,对比可知本文的抗负载扰动控制方法具有较强的实时性。
2)通过仿真和试验结果表明,在快速加载与卸载实验条件下验证了本文所提出的基于降维负载转矩观测器的抗负载扰动方法的正确性与可行性。
猜你喜欢
车主之友(2022年4期)2022-08-27
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
汽车实用技术(2022年4期)2022-03-07
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
装备环境工程(2020年3期)2020-04-03