建筑结构振动分散控制系统的多目标优化研究
2018-11-30 01:05潘兆东周福霖
振动与冲击 2018年22期
潘兆东, 谭 平, 周福霖
(1. 东莞理工学院 建筑工程系,广东 东莞 523808; 2. 广州大学 工程抗震研究中心,广州 510405)
对于大型建筑结构,传统集中控制由于其自身特点将不可避免的面临如下问题:①整个控制系统信息交换异常复杂且极易造成滞后,从而导致系统集成和运行成本提高,系统的可靠性降低;②一旦个别传感器或作动器发生故障,则容易导致整个控制系统失效,可能造成人员和财产的巨大损失。因此,分散控制理论在近年来得到了广泛的关注。在分散控制系统中,每个子系统控制器独立对结构局部进行控制(控制分散化),便于对出现在局部的干扰做出快速响应[1]。
然而,以往对于分散控制的研究多集中在算法应用与试验研究方面[2-12]。分散控制系统优化问题方面的研究则相对较少,且仅针对控制器参数的优化[13-14],并未涉及子系统如何划分、各子系统内作动器数量等问题的优化,不具备普遍适用性。
鉴于此,本文提出一种适合于土木工程振动控制的分散控制系统优化设计方法。该方法建立在可控性指标[15]、粒子群[16]-差分进化[17]多目标混合群算法以及分散控制系统结构随机响应求解基础上。首先利用结构可控性指标对控制装置最优布置楼层进行确定;其次,在随机地震激励下,利用多目标混合群优化算法对各子系统内作动器数量和控制器参数进行优化,多目标混合群算法同时采用粒子群(Particle Swarm Optimization, PSO)算法与差分进化(Differential Evolution, DE)算法进行对应种群的进化,使用庄家法则构造非支配解集[18],并结合土木工程结构控制特点(有较好的控制效果)及实现性(较低的控制能量),提出边界点几何中心leader选择机制,在满足种群进化多样性要求的同时保证了收敛速度。最后,以一12层框架结构为例进行优化设计,结果表明所提出的优化方法能有效解分散控制系统的优化问题。
1 可控性指标
分散控制系统由若干个独立的子控制系统组成,这就存在子系统如何划分、子系统内作动器数量、作动器位置及子控制器设计的耦合优化问题。其中,作动器的布置位置不仅影响到结构的整体控制效果和控制能量的大小,而且与整个控制系统的稳定性、可靠性以及控制成本息息相关。因此,本文首先利用可控性指标对作动器在受控结构中的最优布置位置进行确定,该指标建立在位移反应谱基础上,可以同时考虑多阶振型的影响,具体如下
(1)
式中:m为考虑控制的结构振型阶数;h为作动器布置位置占结构总高的比例, 0≤h≤1;φi为无控结构第i阶振型, 其通过求解结构运动方程的特征方程求得;ri为与结构第i阶周期相对应的位移反应谱值(地震激励下或规范谱); Δh=h2-h1,h1和h2为作动器的安装位置; Δ[]为振型相关的作动器位置空间系数。作动器候选布置位置根据可控性指标由大到小依次排列确定。
2 分散控制结构随机响应求解
地震激励作用下, 将n层受控结构划分为N个分散的子控制系统,其状态方程可表示为
(2)



(3)


(4)

(5)

(6)
求解式(6)即可得到分散控制系统的结构状态向量zT的方差响应。无控结构与集中控制结构的随机响应求解过程与之相同,这里不再赘述。
3 分散控制系统优化设计
在作动器最优布置楼层确定的基础上采用多目标混合群算法对各子控制系统内每一层的作动器数量和各子控制器反馈增益矩阵进行优化,分散控制系统多目标算法优化流程图,如图1所示。
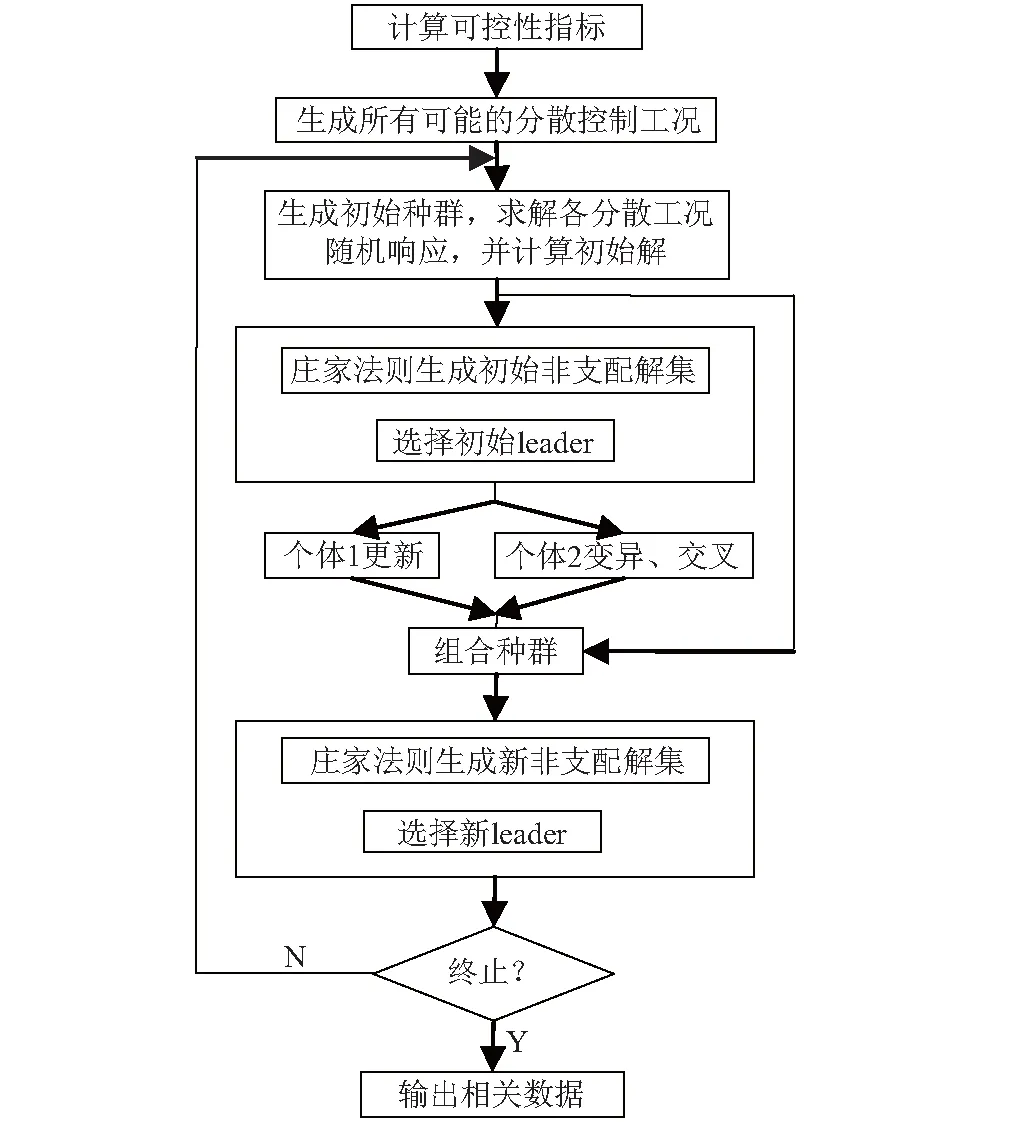
图1 分散控制系统MOHO优化流程图Fig.1 MOHO optimization flow chart of decentralized control system
3.1 优化目标函数
定义两个优化目标函数:①结构减震效果的改善:受控结构和无控结构最大层间位移均方差之比; ②分散控制策略的优劣:主动控制力的均方差总和、作动器数量与位置。该多目标优化问题可以表示为
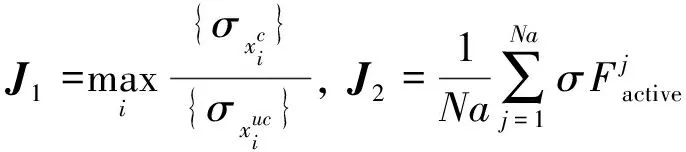
(7)

3.2 粒子群-差分进化多目标混合群优化算法
进化策略是解决任何基于种群算法多目标优化问题的关键环节,在进化过程中,种群中的个体通过不断的更新和选择,直到达到终止准则,分散控制系统的优化同时涉及各子系统内作动器数量以及反馈增益的优化,而采用单一的进化策略则容易导致陷入局部最优。因此,本文采用两种进化策略:差分进化算法和粒子群算法。其中,子控制系统内各层作动器数量的种群个体更新采用粒子群算法,而决定各子控制器反馈增益的种群个体位置进化则采取差分进化算法。
如何构造非支配集将直接影响算法的运行效率,本文选择速度快、效率高的非回溯型的庄家法则来构造Pareto最优解。为保证种群进化多样性及种群个体更新或变异时合理选择leader的问题,同时为获得有较好的控制效果且控制能量较低的控制策略,提出一种基于非支配解集边界点几何中心的leader选择策略(如图2所示),选取相对于假定非支配解集目标中心解距离最近的解为leader。多目标混合群算法各主要参数选择见表1。

图2 几何中心leader选择机制Fig.2 Leader selection based on geometry center

表1 MOHO算法参数
4 仿真分析
4.1 算例模型
以某12层混凝土框架结构为例来验证本文多目标分散控制优化设计方法的有效性。结构长28.8 m,宽15 m,高40.2 m(见图3)。层高首层3.9 m,其余各层3.3 m,柱和梁的设计参数见表2。结构荷载布置满足《建筑结构荷载规范GB50009—2015》相关要求。二类场地,一组,抗震设防烈度7度,结构第一周期为1.16 s。
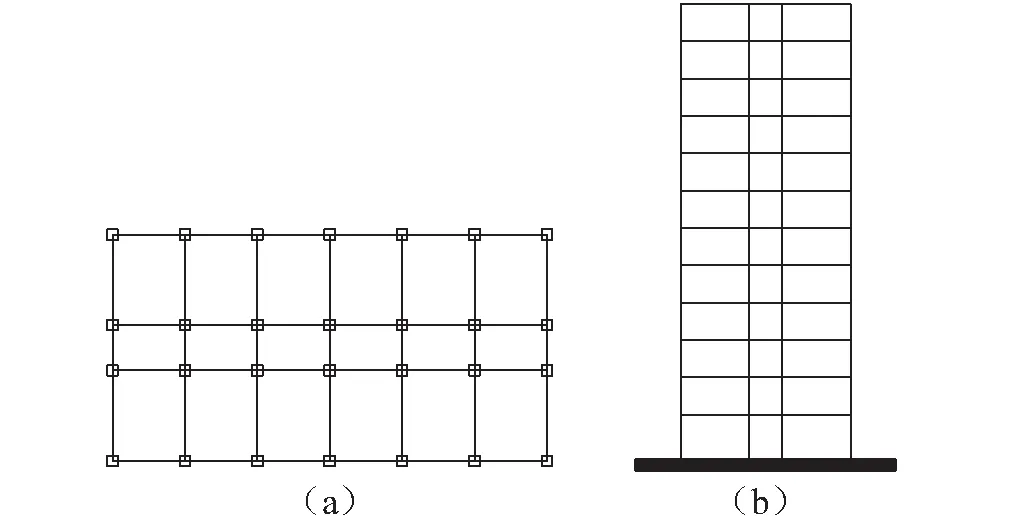
图3 12层框架结构示意图Fig.3 Plan and elevation of 12-story frame structure
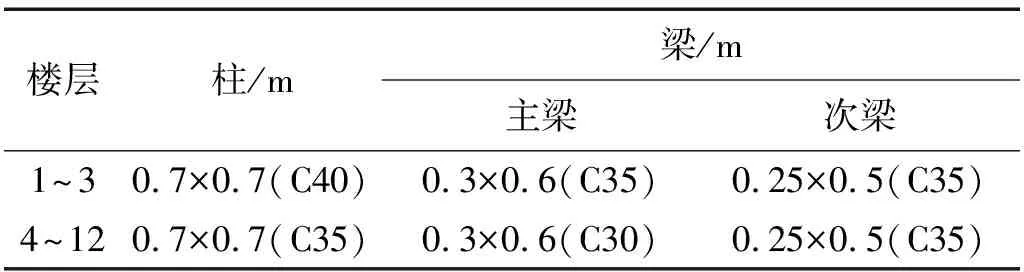
表2 结构设计参数
4.2 确定最优布置楼层
El Centro地震激励下,不同周期结构的位移反应谱如图4所示,由式(1)即可得结构各层可控性指标,当受控振型增加至前五阶时,结构各层可控制性指标不再发生变化。结构仅考虑一阶振型的可控性指标和同时考虑前五阶振型的可控性指标如图5所示。选择可控性指标值较大的前八个楼层(图5(b))为控制装置最优布置位置,即在2~9层布置作动器。

图4 El Centro地震激励位移反应谱Fig.4 Displacement response spectrum of El Centro seismic excitation
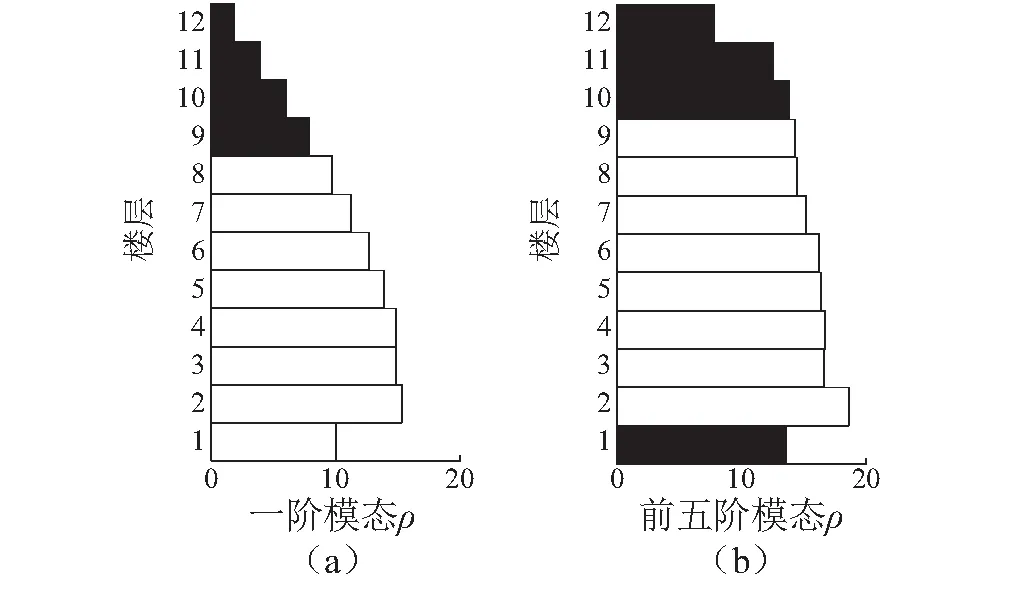
图5 结构可控性指标Fig.5 Structural controllability index
4.3 结构分散控制系统优化设计
假定每层最多布置三个作动器,单个作动器做大允许控制力均方值为2 000 kN, 子控制器权矩阵Qi=10αiI2n×2n,R=INai×Nai,αi为子控制器i的待优化参数,Nai为子系统i的作动器个数。随机地震激励参数[19]:S0=1 cm2/s3,wg=17.95 rad/s,ξg=0.72。
在最优布置楼层确定的基础上生成所有可能的分散控制方案,考虑分散控制的可实现性以及成本控制,子系统个数不宜过多,以至少两层为一子结构进行分散化控制,共生成12种分散控制工况,限于篇幅,这里仅将3子系统分散控制方案各工况,见表3。
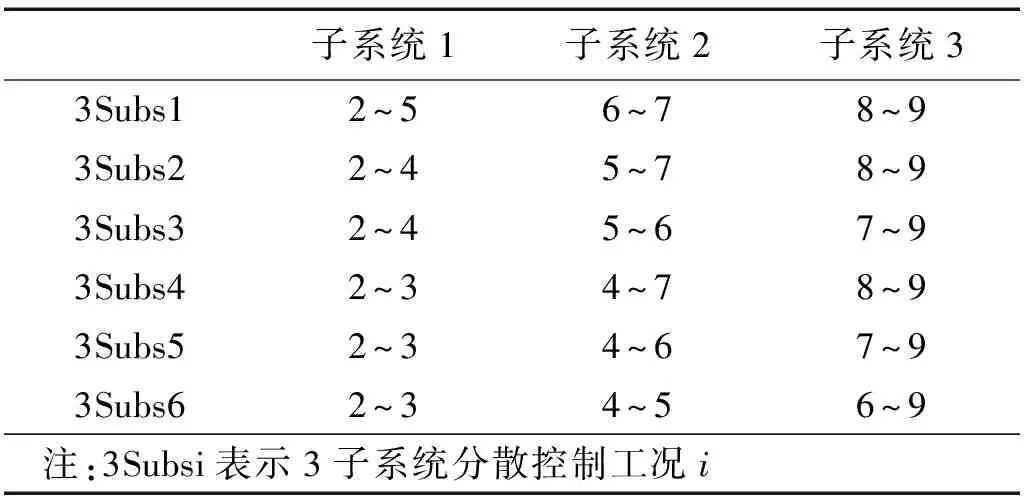
表3 3子系统分散控制工况表
为便于对各分散控制优化结果进行比较分析,本文同时对该结构进行集中控制优化设计。图6为利用多目标混合群优化方法进行集中控制优化时获得的初始种群解、最终非劣解以及整个优化过程中选择的所有leader。可以看出,依据本文提出的边界点几何中心leader选择机制所确定的leader能很好的覆盖结构振动控制策略感兴趣的范围,因此最终非劣解中不会存在过多的不可实现解(J1无限趋于小值,J2偏大)和无意义解(J1无限趋于1),满足了种群进化多样性要求。同时,可以看出,基于双进化策略的MOHO算法最优解集表现出很好的连续性和分布性,不存在遗失某一区间最优解现象,其便于设计者从中选择感兴趣的结果。

图6 集中控制优化过程中Fig.6 The optimization process of Centralized control
3子系统、2子系统分散控制各工况的多目标混合群算法最终非劣解集分别如图7和图8所示。选择控制效果较好、控制能量较低部分进行比较分析,可以发现,子系统个数相同情况下,在相同优化目标J1下,工况3Subs1、2Subs1和2Subs2需要较少的控制能量;分别将图7、图8与图6进行比较,可以看出,在相同优化目标J1下,各分散控制工况较集中控制工况而言需要较少的控制能量。
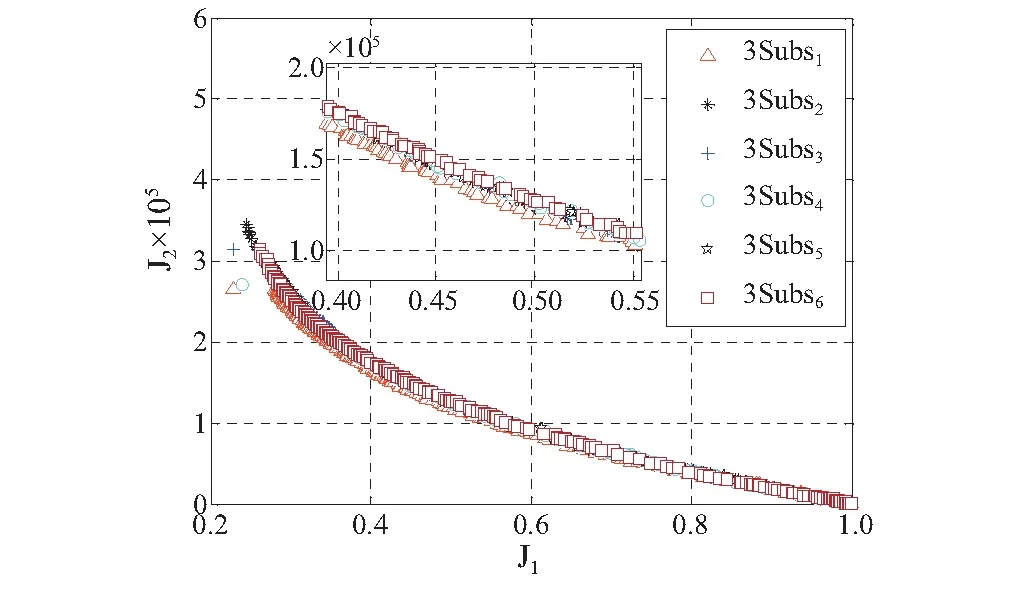
图7 3子系统分散控制优化过程Fig.7 The optimization process of the 3 subsystem decentralized control

图8 2子系统分散控制优化过程Fig.8 The optimization process of the 2 subsystem decentralized control
本算例4子系统分散控制方案仅存在一种分散控制工况,因此,不再绘出其最终非劣解集,仅在优化结果时程验证中选择一组结果进行比较分析(表(4))。以J1=0.4,从集中控制与分散控制工况(2Subs1、2Subs2,3Subs1和4Subs)各选一组优化结果进行时程响应分析(El Centro波地震激励,持时40 s,峰值为300 cm/s2)。集中控制与分散控制均采用绝对加速度反馈,通过建立相应的Kalman滤波器对结构的全状态进行估计,在此基础上利用最优状态反馈增益生成施加于结构上的控制力指令,单个作动器最大允许出力1 000 kN。
分散控制工况3Subs1子系统划分见表3,工况2Subs1子系统划分为:2~4和5~9,工况2Subs2子系统划分为:2~7和8~9,工况4Subs子系统划分为:2~3,4~5,6~7和8~9。表4给出了从 Pareto最优前沿曲线中选择的集中控制和分散控制(子系统个数分别为2、3、4)的最优个体所对应的控制装置位置、数量和相应控制器的最优设计参数,可以发现,各最优分散控制工况的控制力总均方差结果一致,且明显小于集中控制,但各工况作动器数量之和均相近。
图9为El Centro波地震激励下,集中控制与4种分散控制工况下结构各层层间位移角峰值响应与绝对加速度峰值响应。结果表明,优化后的集中控制与各分散控制均能有效抑制结构的地震响应;比较各分散控制工况下结构的峰值响应,可以发现,增加子系统个数,结构减震效果有所减小,加速度控制效果下降明显,但并未出现放大现象;分散控制工况2Subs1和2Subs2的控制效果与集中控制结果接近,部分楼层控制效果甚至有所提高,其中,工况2Subs1层间位移与绝对加速度减震效果最大提高:18.8%和24.4%;工况2Subs2层间位移与绝对加速度减震效果最大提高:25.2%和62.7%。仿真分析结果充分验证了本文所提出的结合可控性指标和双进化策略混合群算法的分散控制优化方法的正确性与优越性。

表4 多目标混合群算法优化结果
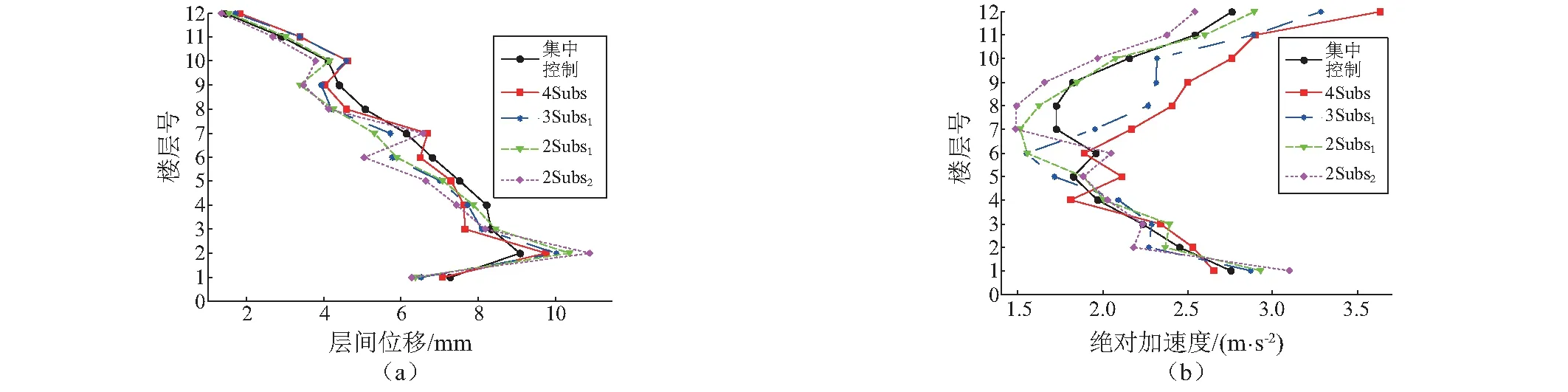
图9 结构峰值响应Fig.9 Peak response of structures
5 结 论
(1) 本文基于结构可控性指标、粒子群-差分进化多目标混合群算法及分散控制系统结构随机响应求解提出的分散控制系统优化方法能有效解决分散控制系统内各子系统作动器位置、数量及控制器参数的优化问题。
(2) 仿真分析验证了本文所提出边界点几何中心leader选择机制的适用性和有效性;多目标混合群算法最优解前沿线具有很好的连续性和分布性,保证了针对每一设计性能要求都有对应解,便于设计者选择。
(3) 较无控结构而言,优化后的集中控制与各分散控制均能有效抑制结构的地震响应;在相同优化目标J1下,各最优分散控制工况较集中控制工况而言需要较少的控制能量;时程分析结果表明,增加子系统个数,结构减震效果有所减小,分散控制工况2Subs1和2Subs2的控制效果与集中控制结果接近,部分楼层控制效果有所提高。
猜你喜欢
哈尔滨工程大学学报(2022年2期)2022-03-11
制造业自动化(2019年9期)2019-09-27
西安航空学院学报(2017年3期)2017-07-05
中国新技术新产品(2017年1期)2017-01-20
山东工业技术(2016年24期)2017-01-12
汽车文摘(2016年11期)2016-12-08
小雪花·成长指南(2016年11期)2016-12-07
北京航空航天大学学报(2016年2期)2016-12-01
浙江大学学报(工学版)(2015年8期)2015-03-01