车辆悬挂LQR主动控制权矩阵权重参数优化
2018-11-30 00:51张进秋彭志召孙宜权
振动与冲击 2018年22期
张进秋, 彭 虎, 张 建, 彭志召, 孙宜权, 王 辉
(1. 装甲兵工程学院 装备试用与培训大队,北京 100072;2. 装甲兵工程学院 技术保障工程系,北京 100072;3. 66222部队,北京 102202)
车辆主动悬挂可实现任意方向出力,可更好地跟踪路面状况变化条件下对悬挂隔振所需的控制力,具有良好的发展前景[1-2]。良好的主动控制算法是保证主动控制性能关键之一[3-4]。LQR线性二次型最优控制是一种经典的最优控制算法,在航天、建筑、桥梁等方面得到了广泛应用[5-7]。LQR主动控制算法的关键在于权矩阵Q和R的设计,且一般无规律可循,通常采用试凑的方法来确定权矩阵的值[8]。该方法的局限性在于效率较低,且难以得到较优的解。
遗传算法(Genetic Algorithm, GA)是一类模拟自然界优化进化和繁殖过程的自适应全局概率搜索方法[9]。具备较好的收敛性能,在满足要求的计算精度时,具有计算时间短且鲁棒性好等优点[10-11]。
本文针对LQR主动控制算法权矩阵取值困难的问题,为降低权矩阵设计复杂度,设计权矩阵Q和R的权重参数,利用GA的快速搜索寻优能力,将原有4参数寻优转变成对权矩阵权重参数的寻优,并将得到的最优解与初始LQR参数在仿真条件下进行对比,验证设计的权矩阵权重参数优化方法的有效性。
1 模型建立及LQR控制算法
1.1 悬挂动力学模型
悬挂动力学建模是对悬挂振动特性及控制性能分析的基础,1/4车悬挂动力学模型可用于对悬挂系统及其控制性能进行理论分析。假设车辆为独立悬挂,质量分配系数为1,建立的1/4车主动悬挂动力学模型如图1所示。
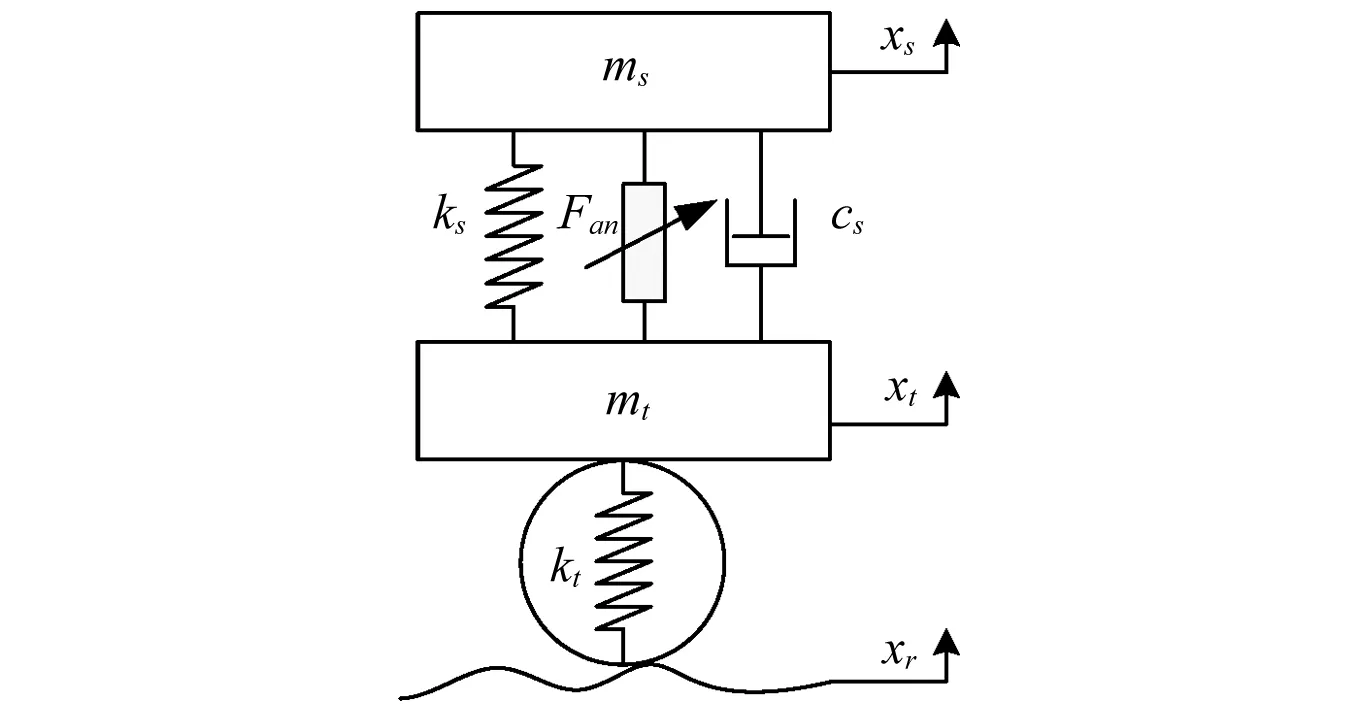
图1 1/4车主动悬挂动力学模型Fig.1 Quarter car active suspension dynamic model
根据牛顿第二定律,建立运动微分方程
(1)
式中:ms为车身质量;mt为车轮质量;ks和kt分别为悬挂等效刚度和车轮刚度;cs为悬挂等效阻尼系数,在此主要包括;xr为路面不平度位移激励;xs和xt分别为车轮和车身垂直位移;Fan为作动器提供的主动控制力。坐标原点选在各自平衡位置,方向均以垂直向上为正。
(2)

1.2 LQR控制算法

式中:ρ1、ρ2、ρ3分别为车身垂直加速度、悬挂动行程和车轮动变形三个被控量的加权系数,依次反映对各受控量的重视程度;r为主动控制力的加权系数,反映对系统提供的主动控制力的重视程度。
取ρ=diag(ρ1,ρ2,ρ3)为权重矩阵,式(3)所表示的性能泛函可写成
令Q=CTρC为状态变量的半正定对称加权矩阵;N=CTρD,为两种变量关联加权矩阵;R=DTρD+r,控制变量的正定对称加权矩阵。
采用变分法求解,可得反馈增益矩阵为
G=R-1BTP
(5)
矩阵P可由Riccati方程求出:
ATP+PA-PBR-1BTP+Q=0
(6)
作动器的最优控制力Fan(t):
Fan(t)=-GX=
-[G1x1(t)+G2x2(t)+G3x3(t)+G4x4(t)]
(7)
2 GA优化加权系数
2.1 权矩阵权重参数
LQR中权矩阵Q和R的设计非常关键,直接影响LQR的控制性能,Q为半正定矩阵,R为正定矩阵。LQR最优控制的目标是以性能泛函最小为约束,需求时变、系统状态及输入变化时所需的最优控制力Fan(t),使系统始终趋于初始最优状态。性能指标加权矩阵Q和控制力矩阵R相互制约,通常选择为对角线矩阵,控制输入单一时可直接取标量为R=1,Q的选择不唯一[13]。
选取车身垂直加速度、悬挂动行程和车轮动变形作为评价指标,分别用ACC、DXC和DZH来表示。Q和R的初始值可分别选取对应变量的最大值的倒数,以ACCmax、DXCmax、DZHmax和Fan_max表示,则
(8)
(9)
式中:λ和ξ分别表示Q和R的权重。通过上式可将优化参数ρ1、ρ2、ρ3和r转变为求解优化参数λ和ξ,简化了计算复杂程度,可以较快地找到最优控制参数。
为了性能指标均衡反映各自性能,应当使性能泛函中各状态变量或控制量的数量级大小一致或相近。以加速度和位移为例,若位移的数量级为加速度的0.01倍,则对应加权值数量级应当为加速度的1002倍。

分别分析λ(lamda)和ξ(kesai)对适应度函数的影响,令ξ=1,λ取值0.01~10,分析λ对f的影响;而后令λ=1,ξ取0.01~5,分析ξ对f的影响,结果如图2所示。

图2 lamda和kesai对f的影响Fig.2 The influence of lamda and kesai on f
图2可知,λ使f先减小,后增大,在λ=5附近取得最小值。该结果表明,为了追求较好的控制效果,需要加大控制性能指标加权矩阵Q的权重,但并非权重越大越好,而是存在一个最优值。ξ使先减小,后增大,控制力矩阵R较小时,可使f的值较小,而加大R的权重后,控制力加大,对控制的实际效果增加比例小于输入的控制力消耗比例,致使f增加。
通过上述分析可知,LQR最优控制的目标需要以较小的控制力消耗来达到最优的控制效果,而两者之间存在一定的相互关联和相互影响关系。因此,需要对λ和ξ进行优化。
2.2 目标函数的建立

(10)

2.3 GA参数寻优
GA对加权系数寻优的步骤为:
步骤1产生初始种群,在设定的约束范围内随机产生N个加权系数的初始种群,以实数形式进行编码。
步骤2将种群中的每个加权系数个体值赋给LQR控制器,由式(6)求出反馈增益矩阵G,并由式(9)求出最优控制力,带入悬挂系统中进行仿真分析,求解各性能指标均方根值。

步骤4GA通过选择、复制、交叉及变异等操作,实现个体编码重组,保留精英个体,并产生新的个体,而后跳至步骤2重新计算适应度函数值。
GA寻优流程如图3所示。

图3 GA寻优流程图Fig.3 Flow chart of GA optimization
设置种群规模100,迭代次数20,交叉概率0.6,变异概率0.1,由于每次运行的初始种群不一致,故得到的最优解也存在一定差异,但总的趋势相一致。算法收敛之后,可得最优值λ=4.785 4,ξ=0.631 5,对应的反馈增益矩阵G=[0.365 5 -0.034 4 1.755 5 -2.690 3]。
3 算例分析
3.1 仿真条件
以被动悬挂及常规LQR为对比,对权矩阵权重参数寻优后的LQR振动控制性能进行分析。
车辆悬挂参数如表1所示。

表1 悬挂系统参数
随机路面生成采用谐波叠加法,谐波叠加法生成路面不平度的主要思想是将路面表示成大量随机相位的余弦级数之和[16],表达式为
(11)
式中:φk为[0.2π]上的随机数,且满足均匀分布;fmid_k为频率区间(f1,f2)上第k个离散区间的重心频率,当车速为v时,fmid_k=nmid_kv;Gxr(fmid_k)为fmid_k处的谱密度值,
Gxr(fmid_k)=Gxr(nmid_k)/v
(12)
C级路面10 m/s车速作为随机路面等级和车速的条件,对悬挂进行仿真分析,时域路面如图4所示。
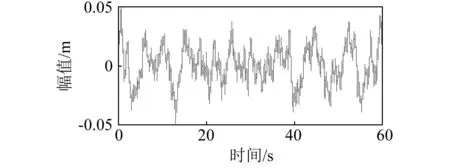
图4 C级随机路面10 m/s车速时域图Fig.4 Time domain chart of random rode at speed of 10 m/s of grade C
3.2 时域分析
仿真时长25 s,步长0.01,LQR表示优化前的结果,GA-LQR表示采用GA优化后得到的结果。随机路面时域分析及减振性能指标统计结果分别如图5及表2所示。
结合图5及表2可知,相比于优化前的LQR控制,GA-LQR可使车身垂直加速度降低29.61%,比LQR高出6.54%;而GA-LQR可使车轮动变形指标比LQR降低幅度高6.14%;LQR和GA-LQR对应的f的值分别为0.793 2和0.784 2,优化后的参数使得f的值降低了。虽然GA-LQR牺牲了一定的悬挂动行程,本文以提高乘坐舒适性为主要目标,达到了优化设计的目的。

图5 随机路面时域分析Fig.5 Time domain analyze of random rode

表2 减振性能指标统计结果
3.3 频域分析
悬挂系统频域分析即通过各指标的传递函数分析各自的频响特性,由于控制的非线性,使得线性系统的频率响应Bode图不适于半主动馈能悬挂性能评价,但可近似估计其传递特性[17]。悬挂系统性能指标频域分析如图6所示。

图6 频域分析Fig.6 Frequency analysis
图6可知,LQR和GA-LQR对车身垂直加速度的抑制主要集中于3 Hz以下的低频段,其中GA-LQR对车身共振区的抑制能力优于LQR;1 Hz以下,LQR和GA-LQR使悬挂动行程恶化,但在车身共振区1~2 Hz区间内可减小共振峰,其余频段影响不大;LQR和GA-LQR对车轮动变形的抑制主要集中于3 Hz以下,其余频段影响不大。
综上所述,LQR和GA-LQR对3个指标的影响主要在低频段,低于1Hz时,对车身垂直加速度和车轮动变形改善不明显,但对悬挂动行程恶化较为明显,因此,不宜在低于1 Hz的频段下进行控制;在车身共振峰附近,对3个指标均有较好的抑制性能,因此,在1~3 Hz频段进行控制效果最为明显;在高于3 Hz的频段内控制效果不明显。车辆行驶工况大多在低频区,因此,采用GA-LQR可有效改善悬挂控制性能,提高乘坐舒适性和操纵稳定性。
4 结 论
针对经典LQR主动控制算法的加权矩阵Q和R难以确定的问题,将权矩阵初始值确定为各指标性能最大值平方的倒数,以便于优化取值。为简小优化复杂度,分别对应Q和R设计权重参数λ和ξ,设计适应度函数f及其约束条件,并分析了λ和ξ对f的影响。利用GA的全局搜索能力优化λ和ξ,并从时域及频域条件下分析了优化前后的LQR性能,可得到如下结论:
(1)λ和ξ对f的影响并非单调的,均有一个先减小后增大的趋势,存在各自的最优值。λ越大,对控制性能越重视,控制效果越好,但过大会超过作动器的最大作动力;ξ的取值不宜过大,一般在1以下最好,否则过度重视减小作动力,会严重影响减振性能;
(2)优化后的参数在降低f数值的约束下,可使LQR控制下的车身垂直加速度和车轮动变形均方根值较优化前分别降低6.54%和6.14%。在改善两者矛盾关系的同时,提高了主动悬挂的乘坐舒适性和操纵稳定性性能。该优化权重参数的方法简单,利用GA寻优,可改善低频条件下的悬挂振动性能,适用于车辆工程领域。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
北京航空航天大学学报(2021年6期)2021-07-20
数学年刊A辑(中文版)(2021年1期)2021-06-09
装备制造技术(2020年2期)2020-12-14
家庭影院技术(2020年6期)2020-07-27
商场现代化(2016年12期)2016-06-06
企业导报(2016年10期)2016-06-04
中国铁道科学(2015年1期)2015-06-26
汽车维修与保养(2015年7期)2015-04-17