
电动公交车用增程器起停及切换过程优化
2018-12-04 08:34楼狄明谭丕强胡志远
同济大学学报(自然科学版) 2018年11期
徐 宁, 楼狄明, 谭丕强, 胡志远
(同济大学 汽车学院,上海 201804)
增程式电动车具有结构及控制相对简单等特点,逐渐成为新能源汽车的一条重要技术路线[1-3].在乘用车领域,多通过小型化的两缸、三缸以及转子发动机等来解决效率及振动噪声问题[2].在公交客车等商用车领域,增程器多匹配柴油机,并且增程器控制策略主要以实现基本功能为目标.研究表明,功率跟随控制策略下增程器需要快速起停技术来进一步降低油耗[3],这将导致发动机暖机起停频繁,同时带来振动噪声等问题[4].增程式电动公交车还存在馈电状态时加速时间长的问题,为了在馈电时发动机能快速输出功率来补充电机消耗的电功率,需要进行快速功率跟随控制策略设计.现有的增程器功率跟随控制策略主要有发动机调速和发电机调速两大类.清华大学采用基于前馈和反馈的控制进行调速[3,5],湖南南车时代电动汽车股份有限公司以及中国汽车设计研究院则进行了发动机电子控制单元(ECU)重新开发[6],在发动机控制器中增加了转速闭环控制;上海牌增程式电动轿车采用了发电机调速模式[7].
本文进行了公交车用增程器起停过程控制策略优化,并设计了发动机调速和发电机调速2种基于前馈和反馈的工况切换策略.最后,基于半实物仿真平台进行了优化试验研究.
1 试验设备及方案
研究对象为某增程式电动公交车,整车参数如表1所示.所搭建的半实物仿真平台如图1所示.采用Matlab/Simulink进行建模,通过Motohawk快速开发平台进行代码编译并移植到Mototran ECM-0565-128控制器上,控制器采用的是Motorola MPC565芯片.动力电池初始荷电状态(SOC)为30%,增程器采用多点式控制策略[7-8].

表1 整车结构参数Tab.1 Vehicle parameters
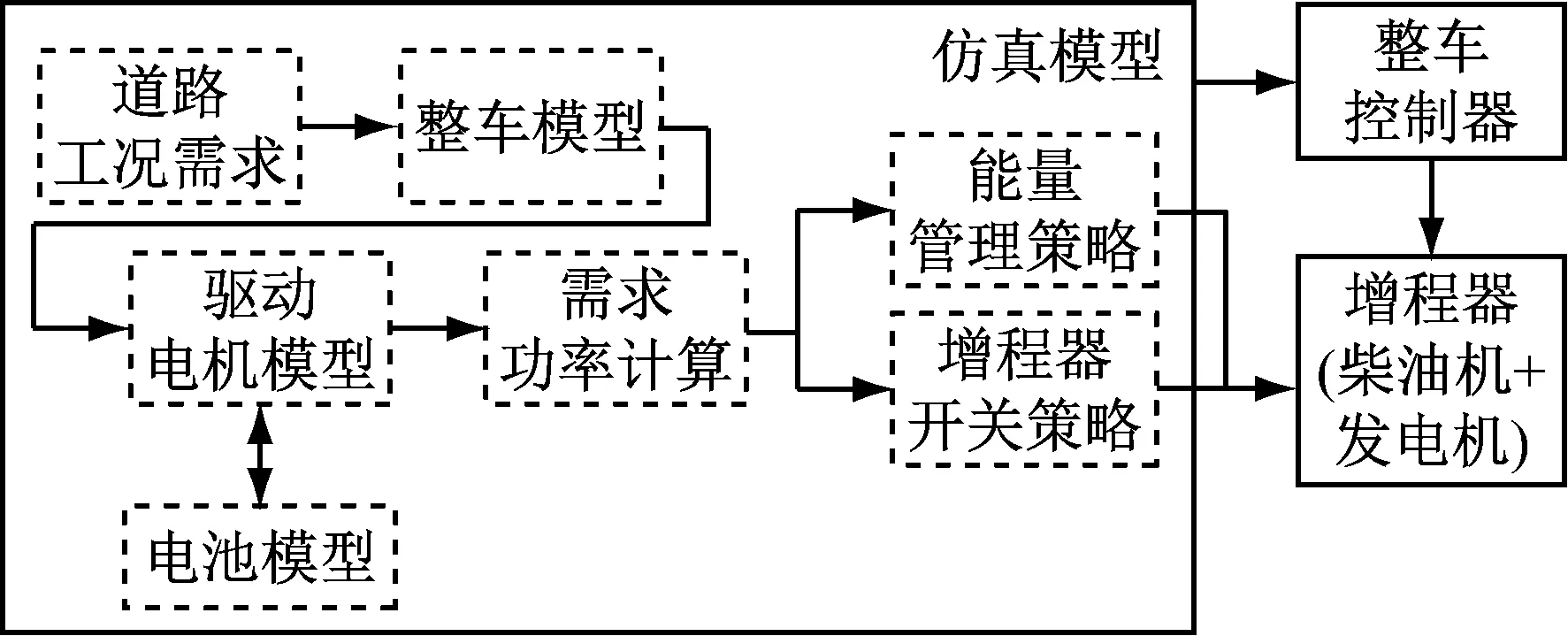
图1 半实物仿真系统框架图Fig.1 Semi-physical system block diagram
增程器匹配某1.9 L四缸柴油机,最大功率为71 kW,对应转速为3 000 r·min-1.试验燃料为国V柴油.采用永磁同步电力测功机模拟增程器用发电机.整车控制器通过CAN(controller area network)总线与发电机控制器进行通信,并通过控制电压输出来控制发动机油门开度.整车控制器采集发动机磁电转速传感器转速信号,并通过CAN采集发电机转速.ES590结合可标定BOSCH ETK进行发动机喷油参数标定.采用测试粒径范围为5.6~560 nm的TSI EEPS 3090颗粒粒径测试仪进行柴油机超细颗粒排放数量分析.试验系统如图2所示.

图2 增程器和试验系统Fig.2 Range extender and experimental system
2 试验结果
2.1 暖机起动过程
增程器暖机起动试验过程中,发动机水温控制在65 ℃左右。依靠发电机倒拖使发动机起动,并通过控制发电机倒拖转矩和倒拖终了转速来控制起动过程.由于增程器转动惯量较大,发电机倒拖过程消耗的功率较大,不宜采用过大倒拖转矩.通过标定系统进行了起动过程发动机喷油限制,试验设置及起动过程所需时间试验结果如表2所示.

表2 起动策略优化测试方案Tab.2 Start strategy optimization test scheme
图3为不同起动策略下发动机转速响应.从图3可见,不同起动策略下,转速达到1 000 r·min-1后完成起动并进入怠速闭环控制.起动过程中在转速300 r·min-1以及600 r·min-1处都分别出现了一个较小和一个较大的转速波动峰值.倒拖转矩增大及倒拖终了转速提高后,发动机起动时间缩短.在低速不喷油时,发动机起动时间会有所延长.
图4为不同起动策略下发动机燃空比及超细颗粒排放数量浓度.从图4可见,虽然超细颗粒数量浓度相对于燃空比有约2 s滞后,但是与燃空比有很强的相关性.起动策略对起动过程超细颗粒数量浓度变化的影响没有明显规律.起动过程超细颗粒数量浓度峰值在2.0×108个·cm-3左右.聚集态颗粒只在前几个发动机循环内占比较高.这主要是由发动机过量喷油使燃空比变小引起的.之后的发动机循环内聚集态颗粒占比都低于10%,这主要是因为燃空比较小,芳香烃等高分子有机物生成增加,导致生成的二次核态颗粒物增加.
倒拖终了转速提高及发动机低速不喷油都会使起动阶段聚集态颗粒占比明显降低,如图5所示.
不同起动策略下起动时间、油耗、超细颗粒数量浓度以及电耗对比如图6所示,相对系数为各起动策略对应性能参数相对该性能参数下最大值的比值.从图6可见,较大倒拖转矩以及较高倒拖终了转速会加快起动过程,较高倒拖终了转速的电耗明显增加,而较大倒拖转矩的电耗增加不明显.较高倒拖终了转速下发动机低转速不喷油时,起动过程油耗较低,但起动时间延长,起动电耗也有所增加,而且起动过程超细颗粒排放没有明显改善.虽然较大倒拖转矩以及较高倒拖终了转速对应电耗较大,但是具有可以加速起动的优势,对应倒拖转矩120 N·m、倒拖终了转速900 r·min-1时,起动时间只有1.01 s,适合暖机快速起动.
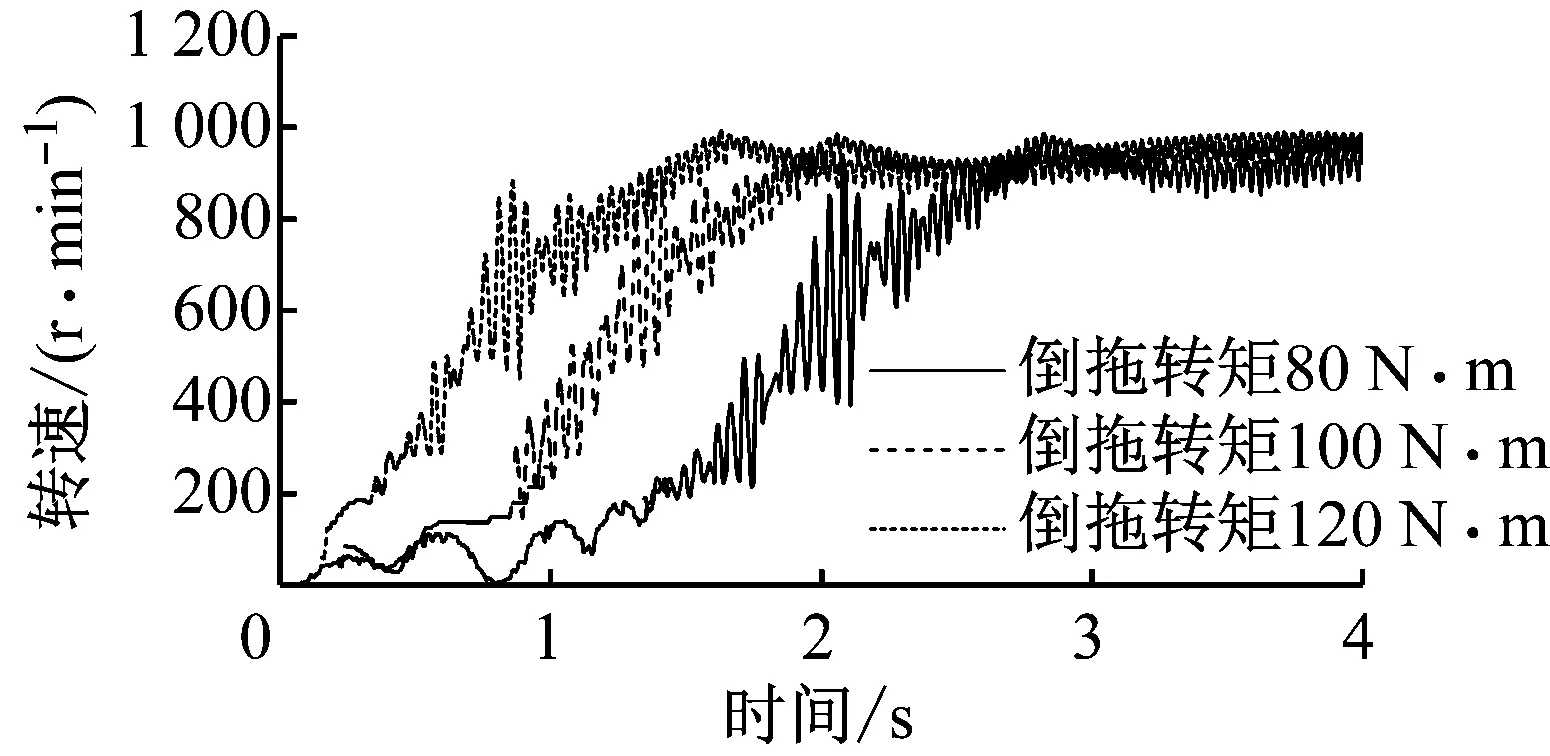
a 发电机倒拖至600 r·min-1

b 发电机倒拖至900 r·min-1

c 发电机倒拖至900 r·min-1且发动机低速不喷油图3 不同起动策略下发动机转速特性Fig.3 Engine speed characteristics under different start strategies
2.2 停机过程
图7所示为自由停机(停机1)过程发动机转速变化特性.
从图7可以看出,自由停机过程中,发动机在转速300 r·min-1以及600 r·min-1处分别出现了一个较大和一个较小的转速波动峰值,在转速为600r·min-1附近发动机转速波动峰值最大可达195r·min-1,同时伴随着明显的停机噪声,而在300r·min-1附近发动机转速波动峰值为80 r·min-1.
在发动机不喷油的状态下,采用发电机倒拖发动机来测试瞬时发动机转速,并分析其在起停转速范围的轴系扭振(包含滚振和扭振),如图8所示.
从图8可以看出,在起停转速范围的较低转速时,发动机轴系扭振角度第2阶谐量比较大,且在300 r·min-1附近最明显,扭振角度高达400 °CA,这主要是由驱动气门的凸轮轴系特性引起的[9].当转速大于400 r·min-1后,发动机轴系扭振角度第1阶谐量更加明显,在600 r·min-1左右扭振角度最大,高达1 000 °CA,这主要是由曲轴轴系系统固有特性决定的.300 r·min-1和600 r·min-12个转速附近,共振更明显,从而导致停机过程转速波动较大并带来噪声.

a 发电机倒拖至600 r·min-1

b 发电机倒拖至900 r·min-1

c 发电机倒拖至900 r·min-1且发动机低速不喷油图4 不同起动策略下超细颗粒排放数量浓度与燃空比
Fig.4Numberconcentrationofultrafineparticlesandair/fuelratiounderdifferentstartstrategies
为了减少停机过程的转速波动,尝试在停机过程采用关闭节气门来抑制作为转速波动激励源的气体力和快速穿越共振明显区域2种方法,以减少转速波动.在关闭节气门的策略下,起停转速范围内发动机轴系扭振特性如图9~11所示.
从图9~11可见,进气门关闭后,扭振角度第1阶谐量明显减少,这主要是因为减少了作为激励源的气体力,而扭振角度第2阶谐量却基本不变.

a 发电机倒拖至600 r·min-1

b 发电机倒拖至900 r·min-1
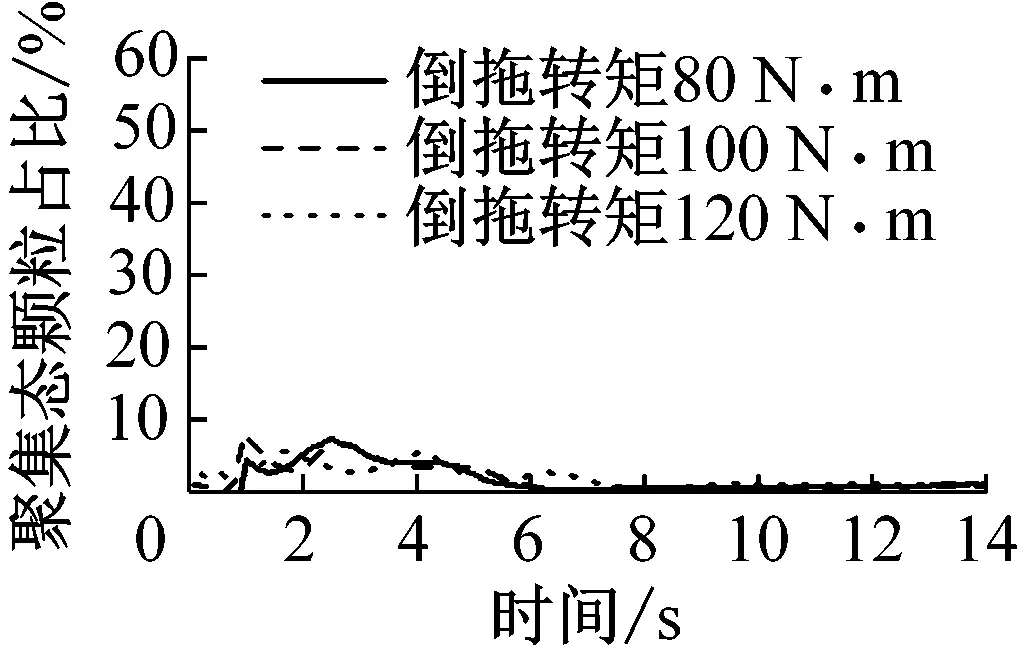
c 发电机倒拖至900 r·min-1且发动机低速不喷油图5 不同起动策略下聚集态颗粒数量占比对比
Fig.5Ratioofaccumulationmodeultrafineparticlestoallparticllesunderdifferentstartstrategies

图6 不同起动策略下主要性能对比Fig.6 Comparison of main performances under different start strategies
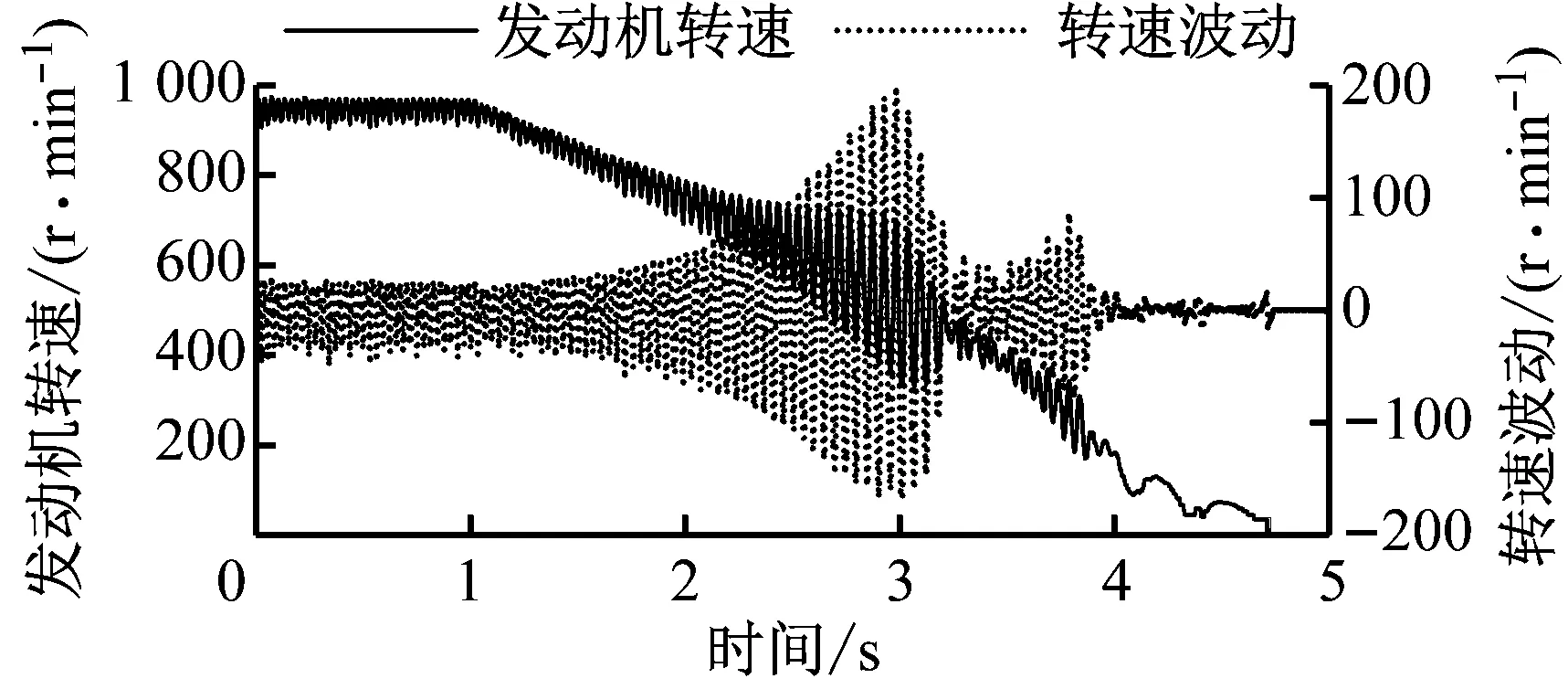
图7 自由停机过程发动机转速变化特性Fig.7 Engine speed variation characteristics during normal stop
分别采用节气门关闭和发电机加载的负载停机来抑制发动机轴系扭振,负载停机控制策略如图12所示.停机负载分别设置为40 N·m(停机2)和80 N·m(停机3).负载脱离转速设置为300 r·min-1,既保证停机过程600 r·min-1和300 r·min-1的转速波动减少,又能够防止增程器反转.

图8 节气门开启时扭振角度频谱图Fig.8 Spectrum of torsion angle with throttle opened
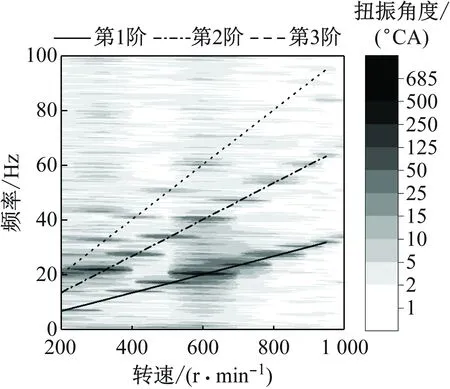
图9 节气门关闭时扭振角度频谱图Fig.9 Spectrum of torsion angle with throttle closed

图10 节气门开启或关闭时转速波动情况
Fig.10Enginespeedvariationwiththrottleopenedorclosed
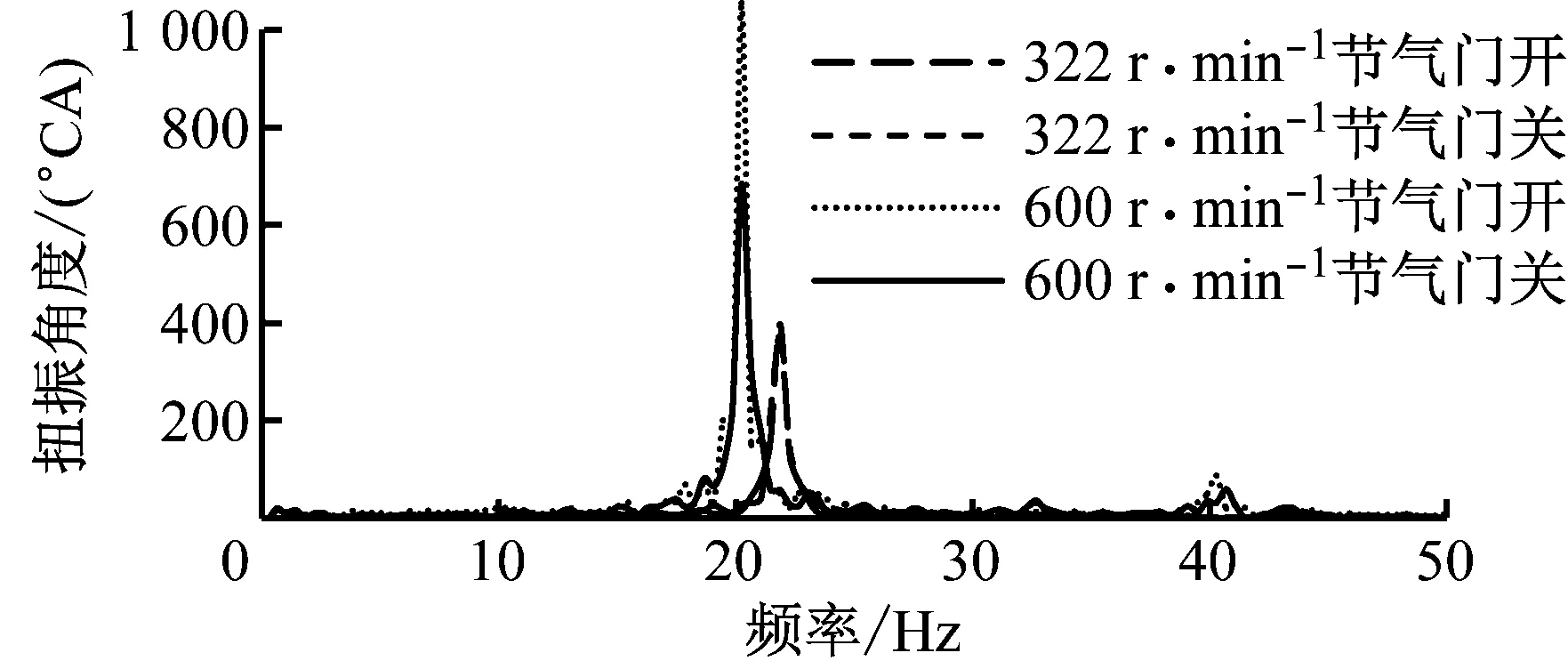
图11 节气门开启或关闭时扭振角度Fig.11 Torsion angle with throttle opened or closed

图12 停机过程控制策略Fig.12 Control strategy of stop
试验结果如图13所示.从图13可以看出,节气门关闭和负载停机都会使发动机转速波动明显减少,如表3所示.节气门关闭之后,发动机转速波动有所减少,在自由停机过程第1阶共振最大转速的600 r·min-1附近转速波动减少了61 r·min-1,而第2阶共振最大转速的300 r·min-1附近变化不明显.负载停机过程相对自由停机过程,转速波动减少很明显,40 N·m和80 N·m负载停机过程相对自由停机过程中第1阶共振最明显时对应转速600r·min-1附近转速波动分别减少了50 r·min-1和81 r·min-1.采用80 N·m负载停机,噪声也得到缓解.
2.3 切换过程
切换过程即为功率跟随过程.采用如图14所示的发动机调速和发电机调速2种基于前馈和反馈的控制策略.
针对增程式电动公交车0~50 km·h-1满负荷加速过程,分别采用2种调速模式并设计了4套控制策略组合,进行半实物仿真下增程器控制策略对比试验.控制策略组合及0~50 km·h-1加速时间和动力电池荷电状态如表4所示.

a 节气门开启

b 节气门关闭图13 不同停机策略下发动机转速波动
Fig.13Enginespeedvariationcharacteristicsunderdifferentstopstrategies
表3停机策略对停机过程转速波动的影响
Tab.3Effectofstopstrategyonenginespeedvariationcharacteristics

试验600 r·min-1附近转速波动/(r·min-1)300 r·min-1附近转速波动/(r·min-1)停机1/节气门关闭195/13483/95停机2/节气门关闭145/9269/47停机3/节气门关闭114/69108/47

a 发动机调速模式

b 发电机调速模式图14 基于前馈和反馈的控制策略Fig.14 Transit control strategy based on feedforward and feedback表4 0~50 km·h-1加速过程增程器控制策略Tab.4 Range extender control strategy during 0-50 km·h-1 acceleration process
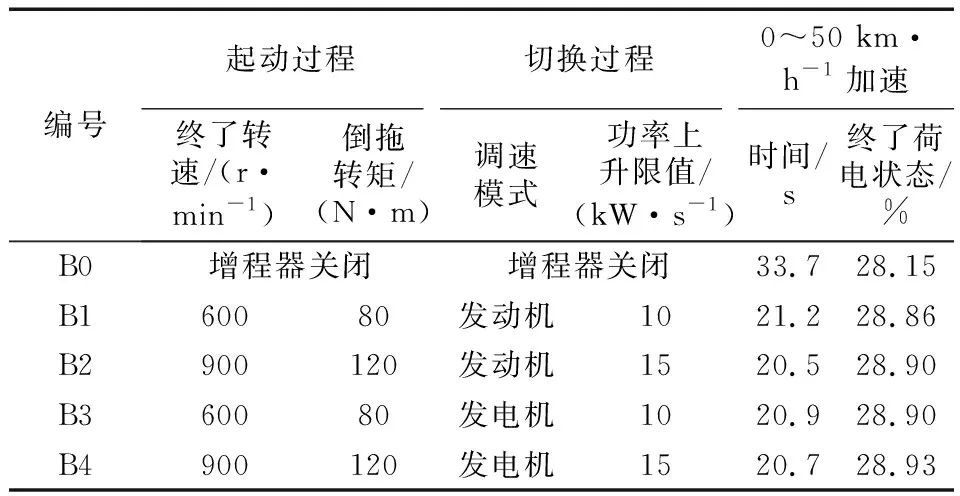
编号起动过程切换过程0~50 km·h-1加速终了转速/(r·min-1)倒拖转矩/(N·m)调速模式功率上升限值/(kW·s-1)时间/s终了荷电状态/%B0增程器关闭增程器关闭33.728.15B160080发动机1021.228.86B2900120发动机1520.528.90B360080发电机1020.928.90B4900120发电机1520.728.93
图15为增程式电动公交车0~50 km·h-1加速过程驱动电机需求电功率和增程器输出电功率.

图150~50km·h-1加速过程驱动电机需求电功率和增程器输出电功率
Fig.15Electricpowerofe-drivemotorandrangextenderduring0-50km·h-1accelerationprocess
从表4和图15可以看出,在动力电池荷电状态较低时,动力电池输出功率受限制,当驱动电机转速大于一定转速时,驱动电机将不能工作在全负荷,因此0~50 km·h-1加速时间达33.7 s.为提升加速性能,需要增程器补充驱动电机电功率,而不同策略下增程器从输出功率到输出最大功率都需要一段时间,所以驱动电机无法满负荷加速,0~50 km·h-1加速时间都大于20 s.发动机调速模式和发电机调速模式下,当采用快速起动策略和较大功率变化率限值时,增程器输出功率响应速度明显增大,0~50 km·h-1加速时间变短,分别减少了0.7 s和0.2 s,而荷电状态变化不大,分别只少增加了0.04%和0.03%.此外,倒拖起动时,如果电池输出电功率能够同时满足驱动电机外特性和倒拖发动机电功率需求,整车加速性能就不受倒拖起动影响,否则加速性能将变差,但不明显.
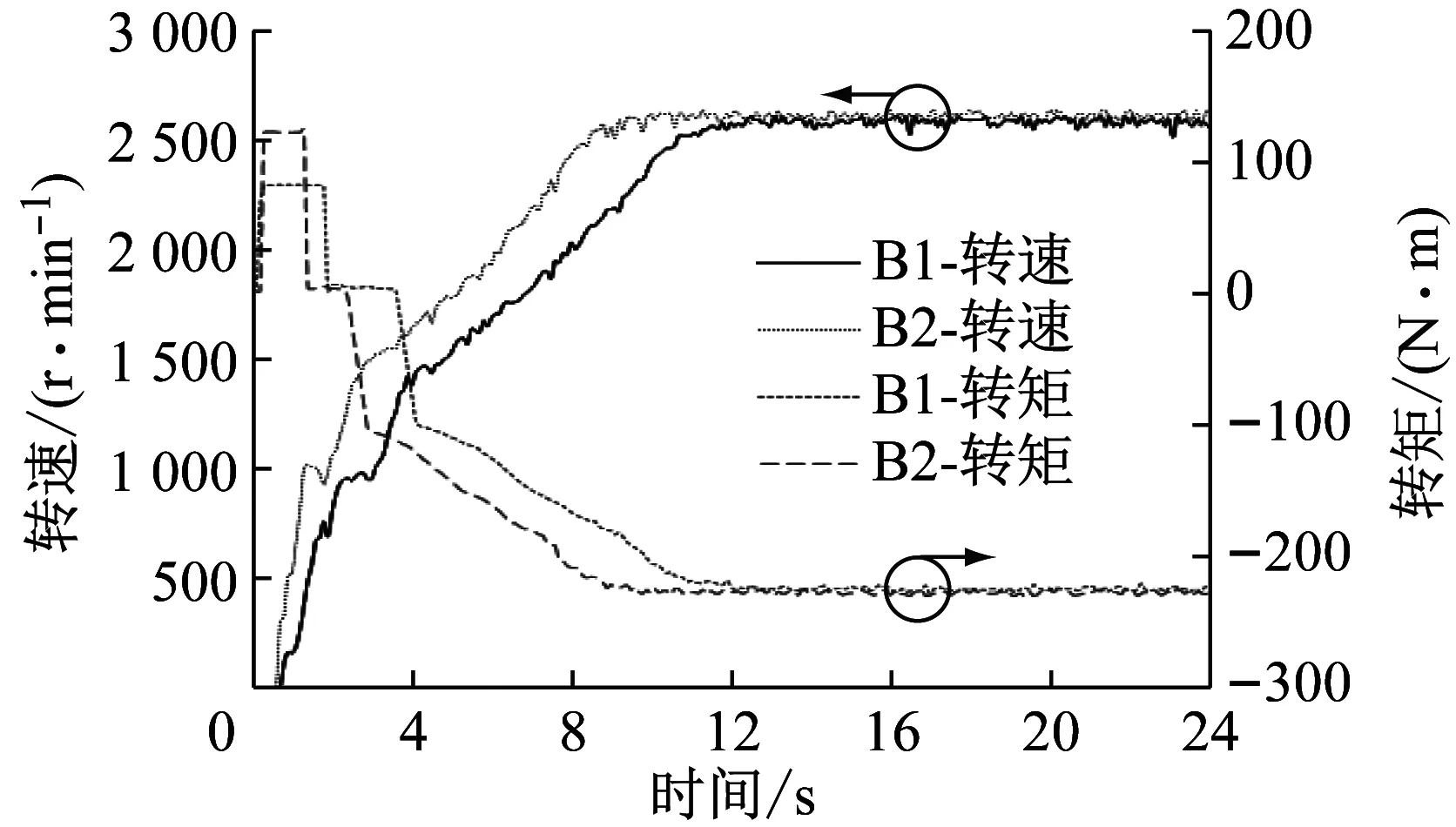
图16为不同调速模式下增程式电动公交车加速过程增程器转速和转矩.从图15、16可以看出,发动机调速模式下增程器电功率输出比较平缓,但在发电机调速控制模式下,由于PID控制器对发动机转矩的调节,增程器先完成加速过程后才输出电功率,导致增程器输出电功率有所滞后和波动.
a 发动机调速模式

b 发电机调速模式图16 0~50 km·h-1加速过程增程器转速和转矩响应
Fig.16Speedandtorquecharacteristicsofrangeextenderduring0-50km·h-1accelerationprocess
图17所示为2种调速模式下增程式电动公交车加速过程发动机工况点分布情况.

图17 0~50 km·h-1加速过程发动机工况点分布
Fig.17Engineworkingpointdistributionduring0-50km·h-1accelerationprocess
从图17可以看出,发电机调速模式下,发动机工况点分布主要集中在最优工作曲线附近,而发动机调速模式下,当目标转速增大时,PID控制系统输出正转矩,在目标转矩不减小时,发动机输出转矩有增大的趋势,因此发动机工况点分布将由最优工作曲线向较大转矩的外特性曲线偏移.当输出功率上升限值增大后,PID控制输出的正扭矩也增大,发动机工况点分布将更向外特性曲线偏移.此外,在发动机最优工作曲线距离外特性较近时,容易出现提速缓慢甚至无法提速现象,这都将导致发动机油耗的恶化.
图18所示为2种控制模式下增程式电动公交车加速过程发动机超细颗粒数量浓度排放特性.
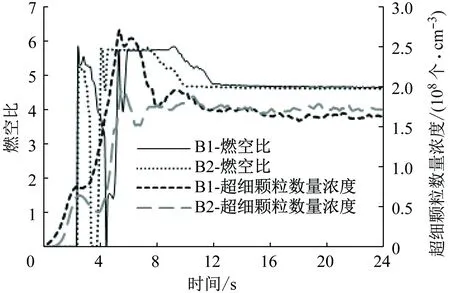
a 发动机调速模式

b 发电机调速模式图18 加速过程超细颗粒数量浓度和燃空比
Fig.18Numberconcentrationofultrafineparticlesandair/fuelratioduringaccelerationprocess
从图18可以看出,增程式电动公交车加速过程超细颗粒排放变化特性相对燃空比滞后,发动机模式和发电机模式对超细颗粒数量浓度影响不明显,超细颗粒数量浓度峰值不是出现在起动阶段,而是出现在加速加载阶段,为2.5×108个·cm-3,并且此过程中聚集态颗粒所占比例多达90%.这主要是因为此阶段燃空比较大,导致油滴雾化较差,局部缺氧现象严重,因此燃烧不完全产生的碳粒增加,聚并而成的聚集态颗粒也增加[10].
3 结论
(1) 倒拖转矩增大和倒拖终了转速提高都会加快增程器起动过程,组合作用下起动时间可低至1.01 s.
(2) 停机过程采用负载停机和关闭节气门停机后,停机过程转速波动都会减小,但负载停机时更明显,也更易实现.
(3) 在快速起动和增大增程器输出电功率上升限值后,电动公交车0~50 km·h-1加速时间有所减少.
(4) 发动机调速模式相对发电机调速模式,功率输出更加平缓,但发动机工况点分布会偏离发动机最优工作曲线.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
中学生数理化·中考版(2022年4期)2022-04-26
汽车实用技术(2022年4期)2022-03-07
中学生数理化·中考版(2020年12期)2021-01-18
中学生数理化·中考版(2020年12期)2021-01-18
汽车实用技术(2020年2期)2020-02-25
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年19期)2018-04-28
汽车文摘(2017年5期)2017-12-05
汽车文摘(2017年10期)2017-12-02
