
电絮凝法处理含磷废水CFD模型的构建与验证
2018-12-27 09:26刘晓辉商卫纯
净水技术 2018年12期
刘晓辉,冯 骞,,商卫纯
(1. 河海大学环境学院,江苏南京 210098;2.浅水湖泊综合治理与资源开发教育部重点实验室,江苏南京 210098;3.宁波市环境保护科学研究院,浙江宁波 315010)
随着工、农业的快速发展以及人口的极剧增长,有大量的工、农业废水以及生活污水产生,如果这些污、废水得不到合理的处理而被排放到受纳水体,其中含有的氮、磷物质就会使受纳水体产生富营养化[1]。研究表明造成富营养化的限制性因素是磷而非氮,因为氮可以被水体中的固氮细菌所固定[2]。因此,为了解决水体富营养化问题,受污染水体除磷研究显得尤为重要。


(1)
(2)
(3)
(4)
VOK (variable-order-kinetic model)模型是将法拉第定律与吸附等温线结合的一种可变级的吸附动力学模型,已被广泛用于模拟电絮凝反应器的工作过程[10]。研究表明,VOK模型能够较精确的预测间歇式电絮凝反应器的处理效率,然而对于具有流动水体的连续式电絮凝反应器,其预测精度明显下降。原因是VOK模型没有将电絮凝反应器的水动力特性考虑在内。利用计算流体力学软件将VOK模型与水动力模型进行组合,能够更好地描述水动力作用对电絮凝反应器处理效率的影响,从而弥补了VOK模型的缺陷[10]。
本文采用Fluent 6.3将水动力模型与VOK模型进行组合,构建了除磷电絮凝反应器的CFD模型。模型验证试验采用人工配制的磷酸盐溶液作为模拟废水;设定连续式电絮凝反应器运行工况为:电流密度为2 mA/cm2,转子转速为10 rad/s;测定不同反应时间下磷酸盐的去除率并对比试验测定的数据与模拟数据,进而对CFD模型进行验证;通过测定RTD曲线对反应器水动力特性进行验证;此外,将不考虑水动力作用的VOK模型模拟结果与CFD模型模拟结果进行对比来评估CFD模型预测结果的精确性。
1 试验方法
1.1 试验装置与运行条件
电絮凝反应器制作材料为PMMA(有机玻璃)。如图1所示,反应器的长×宽×高为15 cm×15 cm×15 cm,反应器有效容积为3 L,反应器上安放固定电极板的支架,极板间距采用1 cm,电极板采用四块铝制电极板,电极板长×宽×厚为10 cm×8 cm×2 mm,底部旋转转子直径为10 mm,长为50 mm,进出口直径为10 mm。试验所用电源为可调直流稳压电源,电流调节范围为0~5 A,调节精度为0.001 A;试验用水采用59 mg/L的Na3PO4·H2O进行配制,其中磷含量为10 mg/L,为了增加溶液的导电性,在磷酸盐溶液中添加500 mg/L的Na2SO4[9];电絮凝取样记录时间设为0、15、30、45、60、90、120、180 min;试验中采用NaOH和HCl调节磷酸盐溶液pH值=6。

图1 电絮凝连续试验装置示意图Fig.1 Schematic Diagram of Electrocoagulation in Continuous Experiment
1.2 RTD曲线的测定
电絮凝反应器可以看成多釜串联反应器[11];为了验证模型的水动力特性,本研究采用脉冲示踪响应法测定电絮凝反应器的停留时间分布(residence time distribution,RTD)函数,进而获得反应器的串联数,用来表征反应器水动力特性以及混合程度;用亚甲基蓝做示踪剂,测定的控制点选在反应器出水口的位置,每5 min取一次样,连续取样2 h,之后在DR6000紫外分光光度计(HACH)下测定样品的吸光度进而得到每个时间点样品中亚甲基蓝浓度[12-13]。为了进行RTD分析,需要通过式(6)计算得到亚甲基蓝浓度的停留时间分布曲线E(t),平均停留时间t(m)用式(7)进行求解,方差用式(8)进行计算,通过RTD分析进而验证所选水动力模型的可靠性。

(5)
(6)

(7)
(8)
其中:M—亚甲基蓝质量,取1 g;
Q—反应器出水流量,取2 mL/s。
1.3 参数测定

2 CFD模型的建立
2.1 模型假设
为了简化模型提高运算速度,作以下假设:(1)将电絮凝反应器看作是N个串联的完全混合反应器的组合以便用多釜串联模型对反应器进行模拟;(2)将磷酸盐溶液看成单相流;(3)短时间内不考虑极板钝化,不考虑极板上电流电压所发生的变化;(4)Al3+的产生速率符合法拉第定律;(5)磷酸根主要是由Al3+及其水解化合物的吸附作用去除的,并且吸附后会迅速生成沉淀,吸附过程是磷酸根去除过程的控制步骤;(6)溶液中所发生的电化学反应不影响液体的流态;(7)被吸附的磷酸盐通过气浮或沉降作用去除,不会重新溶解到溶液中。
2.2 VOK-水动力耦合模型的构建
2.2.1 磷的去除动力学模型表达
除磷动力学模型采用Hu等[15]提出的VOK模型,VOK模型是将法拉第定律与吸附动力学模型相结合,其认为磷酸根的去除速率与Al3+产生的速率相关;具体推导过程如式(9)~式(10)。
(9)
(10)
φm是磷酸根与铝的水合物的结合效率,Mtot表示在阳极产生的铝离子的总量,φ为产率系数,F为法拉第常数,V为反应器有效体积,I为电流,法拉第定律与吸附等温线结合后得到常用的3种VOK模型。
Langmuir-VOK模型如式(11)。
(11)
Freundlich-VOK如式(12)。
(12)
Langmuir-Freundlich-VOK模型如式(13)。
(13)
其中:kl—Langmuir参数;
kf—Freundlich参数;
klf—Langmuir-Freundlich参数;
n—吸附动力学级数。
2.2.2 水动力学模型的表达
电絮凝反应器内的水流属于湍流流动,运动要素会随时间做不规则急剧变化。为了求解湍流状态下的Navier-Stokes方程,目前工程上最常采用标准k-ε模型,所以本研究选用标准k-ε模型模拟电絮凝反应器内的流动状态[16-17];湍动能k和耗散率ε方程如式(14)~式(16)。

(14)
(15)
(16)
其中:μt—湍流黏性系数;
Gk—平均速度梯度引起的湍动能产生项;
Gb—由于浮力影响引起的湍动能产生项;
YM—可压缩湍流脉动膨胀对总的耗散率的影响;
C1ε、C2ε、C3ε—经验系数,在Fluent 6.3内分别为1.44、1.92、0.09;
σk、σε—k,ε的湍流普朗特数。
2.2.3 磷酸根输运方程的表达
(17)

2.3 除磷电絮凝反应器的数值模拟
2.3.1 物理模型的构建及网格的划分
电絮凝反应器有效部分长×宽×高=15 cm×15 cm×15 cm,如图2所示,Fluent 6.3采用控制体积的计算思想,采用Gambit构建电絮凝反应器的物理模型并进行网格的划分,从而实现区域离散化,为了减少计算时间本文采用四面体非结构性网格,反应器内分为动区域和静区域,动区域和极板处网格进行加密。

图2 电絮凝反应器物理模型及网格划分Fig.2 Physical Model and Grid Division of Electrocoagulation Reactor
2.3.2 边界条件与初始条件的设置
进口边界采用速度进口边界,进水流量为2 mL/s,即0.255 m/s;出口边界采用自由出流边界;极板、反应器壁采用固体边界,反应器上部边界采用自由界面,动区域与静区域之间边界采用界面边界,转子转速为10 rad/s,转子边界采用动固体边界,动区域的旋转类型采用移动参考系法。
2.3.3 模型参数的设置
(1)电絮凝反应动力学参数
由图3可知,当电流密度为2 mA/cm2时,电絮凝产率系数φ=11.224;结合效率φm采用试算法确定为φm=0.921;分别采用Langmuir、Freundlich和Langmuir-Freundlich方程对图4试验结果进行拟合得到各方程的参数如表1所示,其中Langmuir-Freundlich方程与吸附试验数据吻合最好。
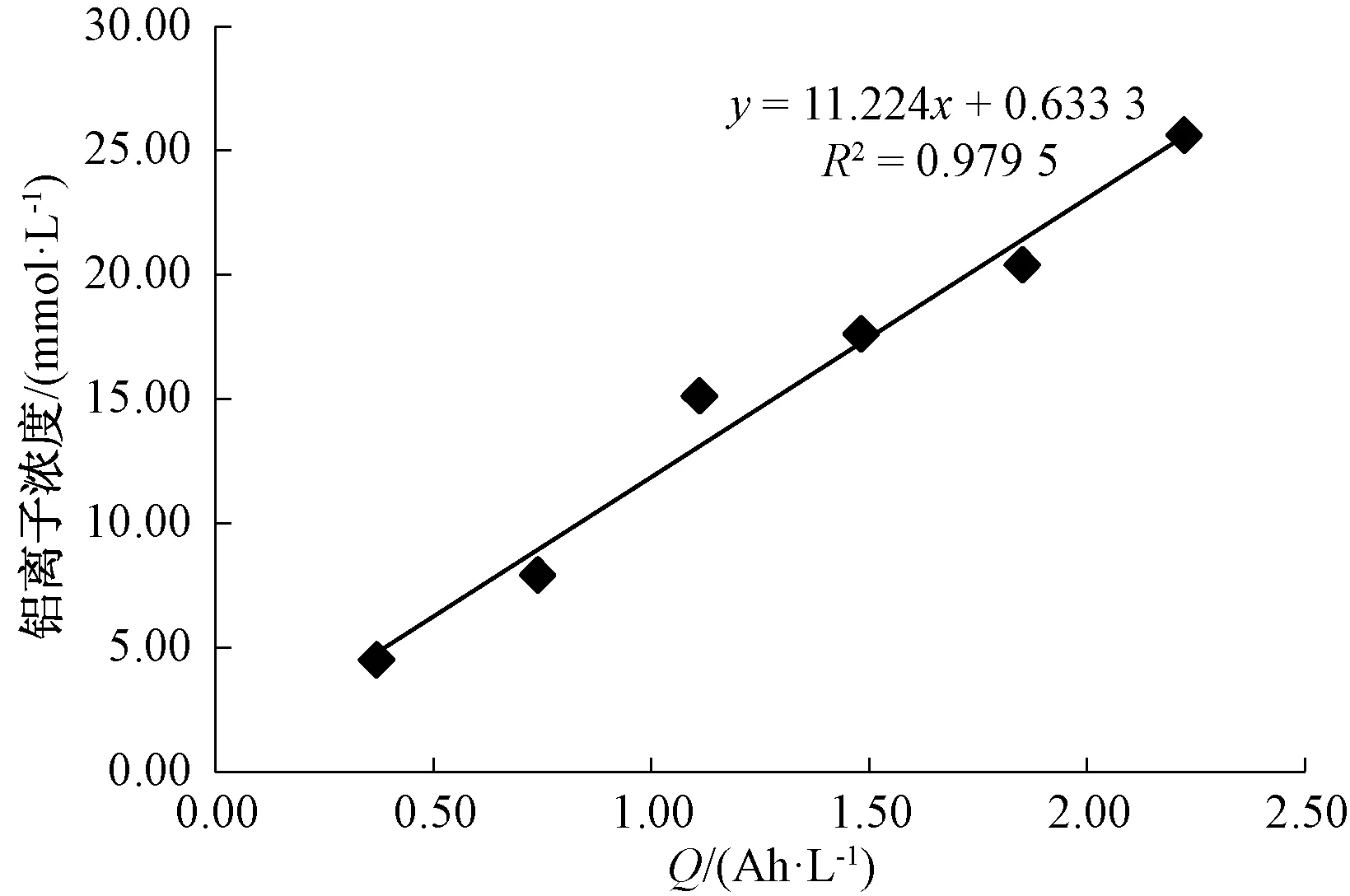
图3 在电流密度2 mA/cm2下铝离子摩尔浓度与电荷量Q的关系曲线Fig.3 Relationship between Molar Concentration of Aluminum Ion and Charge Q under Current Density of 2 mA/cm2
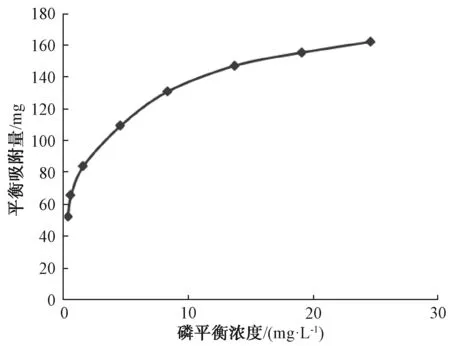
图4 T=298 K下磷在絮体上的吸附等温线Fig.4 Adsorption Isotherm of Phosphorus on Floc at T=298 K

表1 T=298 K下各吸附等温线方程参数Tab.1 Parameters of Adsorption Isotherm Equation at T=298 K
(2)水动力学参数
水动力模型采用标准的k-ε模型,水力半径R=0.007 5 m,紊动强度为5.7%,其他参数均使用系统省缺值。
2.3.4 模拟结果与讨论
(1)流场分布
由图5(a)和图5(b)可知,电絮凝反应器内速度分布情况,转子转动区域流速较大,其他区域速度分布逐渐变小,壁面处速度降为零。由底部剖面速度分布轮廓图5(d)可知,反应器内流体的转动是由转子的旋转带动的,且由内向外传播在反应器四个边角处出现部分死区,使得磷酸盐在反应器内实际停留时间变小,在死区处不利于磷酸盐的传质,会直接导致磷酸盐的处理效果变差。水动力模拟结果与实际情况相符,这说明所选用的标准k-ε模型能够较好的模拟电絮凝反应器内的流速分布。
(2)RTD曲线的CFD模拟
反应器的水动力特性采用RTD分析进行表述,本文采用物质传输模型进行RTD曲线的模拟,首先定义一种与水具有相同性质的物质即为假想示踪剂,之后每隔300 s对出口断面进行监测,得到示踪剂浓度的停留时间分布曲线E(t),然后根据所得到的数据利用式(5)和式(6)进行处理得到图6。

(3)模型模拟结果与分析
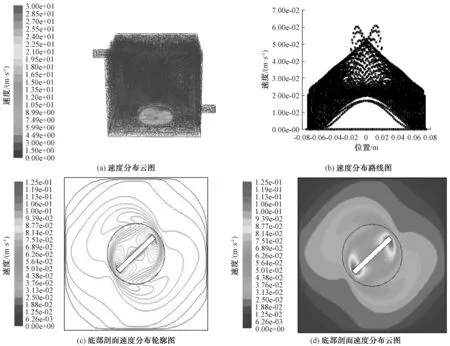
图5 电絮凝反应器内流体的流场分布图Fig.5 Flow Field Distribution of Fluid in Electrocoagulation Reactor
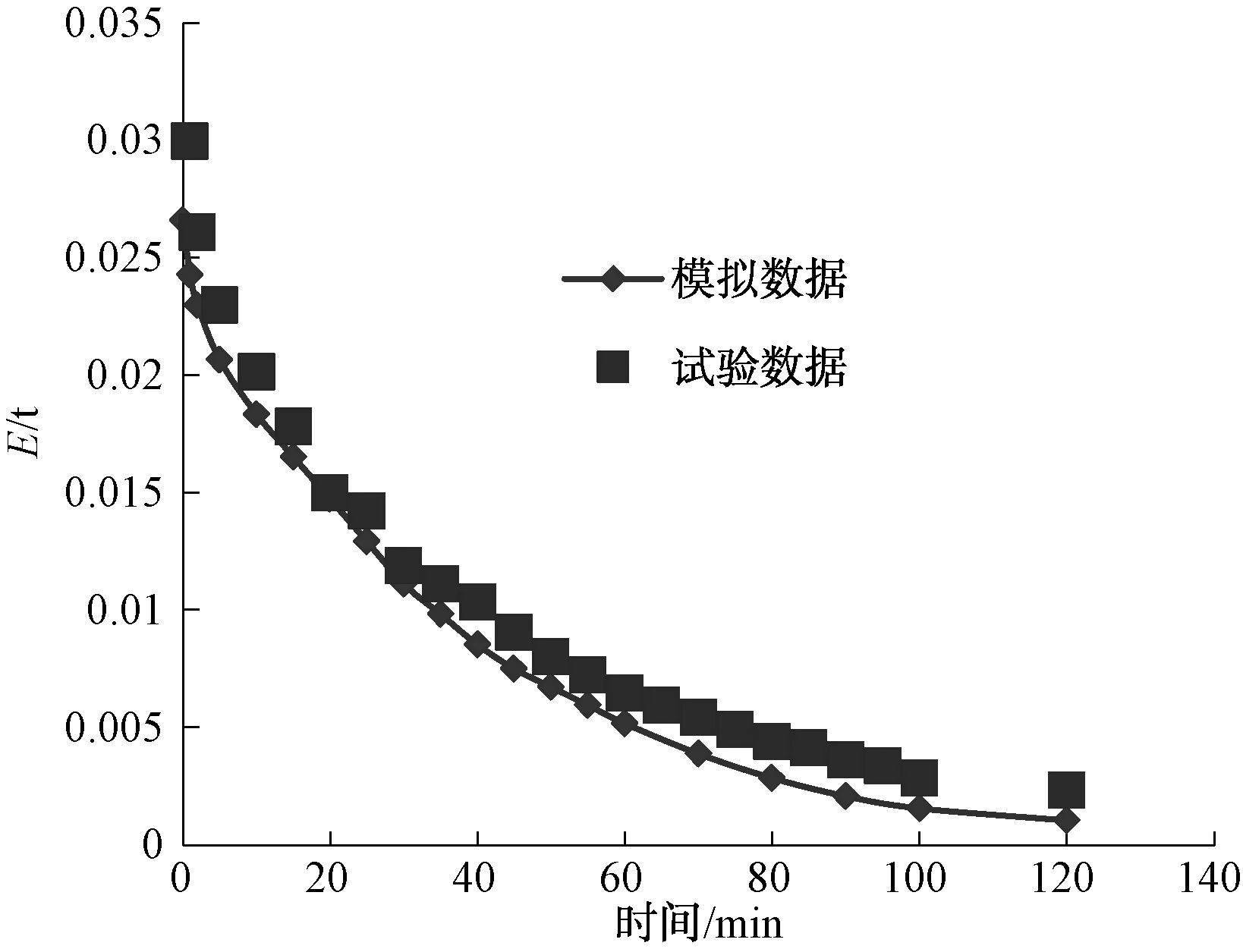
图6 电絮凝反应器RTD曲线图Fig.6 RTD Curve of Electrocoagulation Reactor
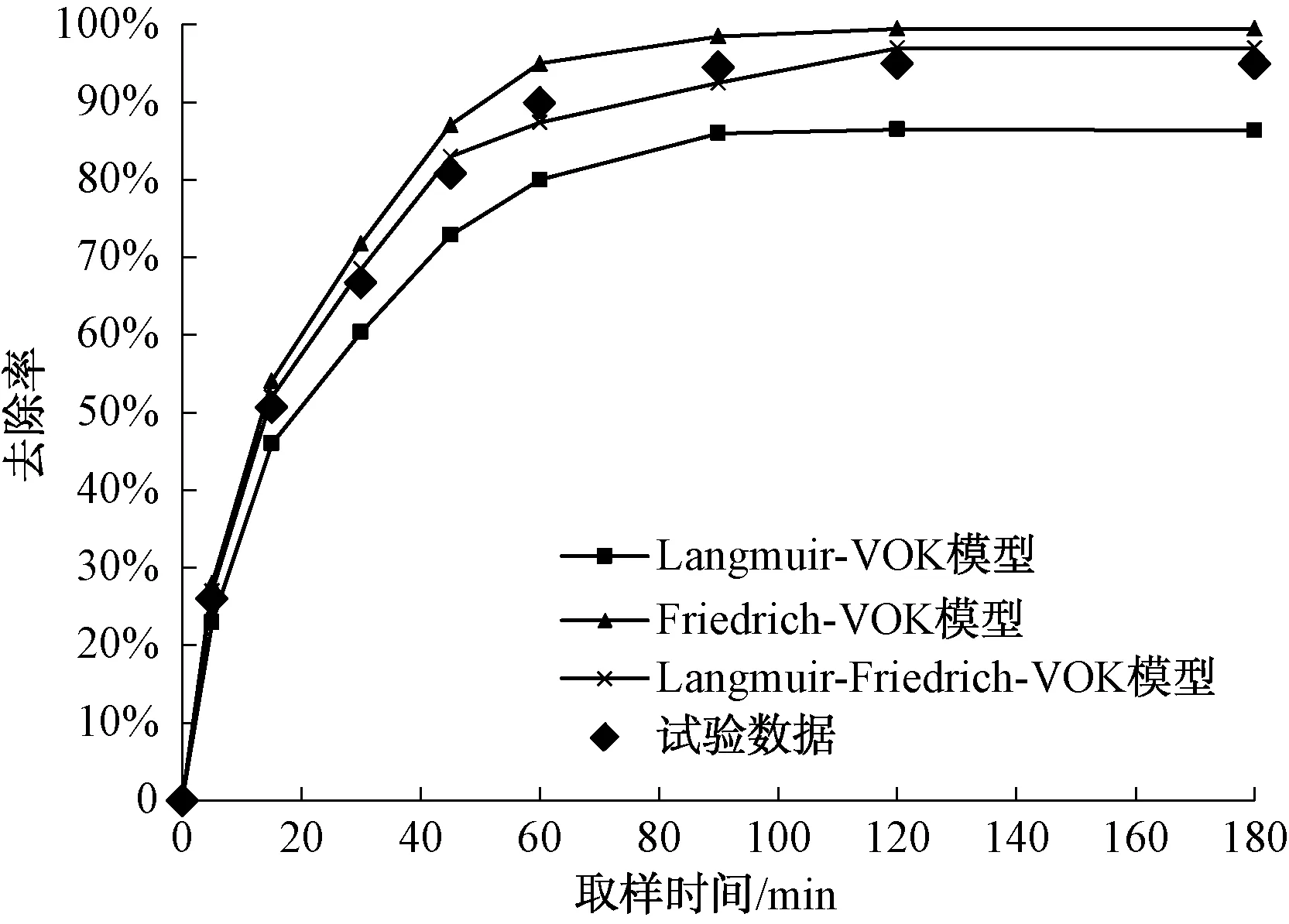
图7 不考虑水动力条件下VOK反应动力学模型模拟结果Fig.7 Simulation Results of VOK Reaction Kinetics Model without Considering Hydrodynamic Conditions
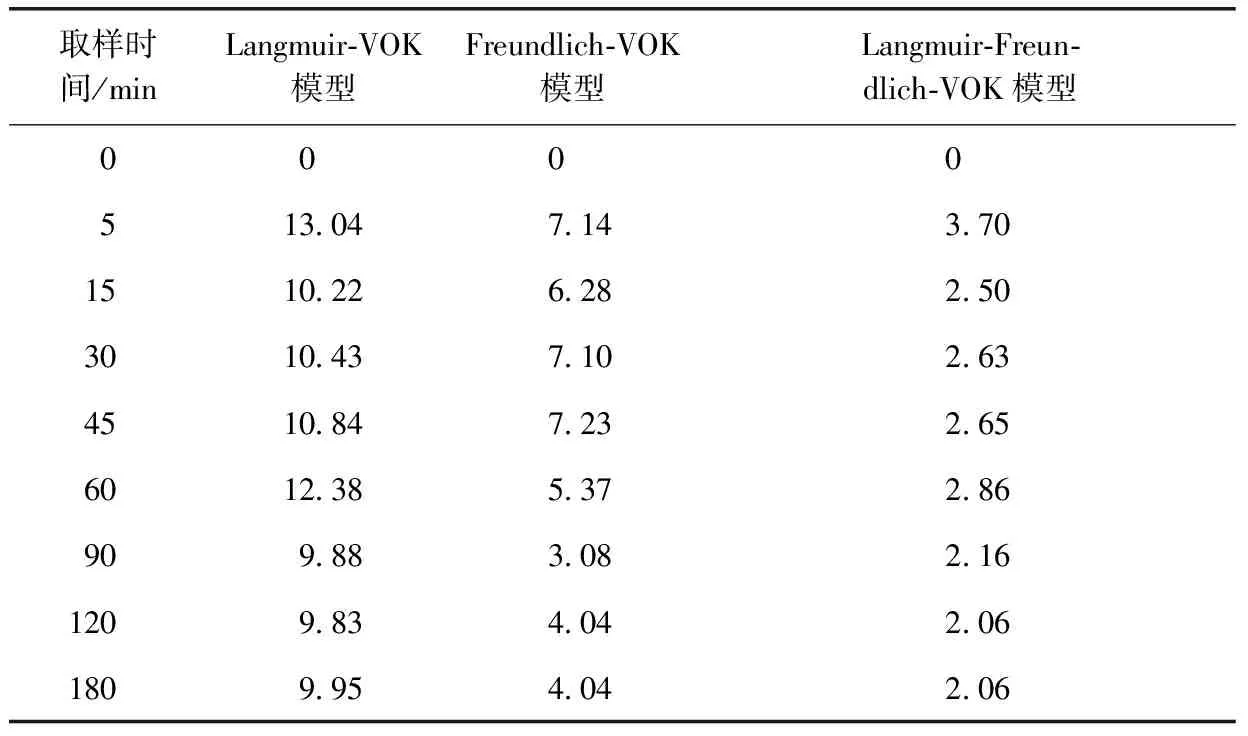
由图7和图8可知,连续式电絮凝除磷过程的非稳定期约为60 min,之后对磷的去除率基本稳定,电絮凝反应进入稳定期。由表2和表3可知,模拟偏差随着时间的变化而变化,特别是对于非稳定期的模拟偏差浮动较大,原因是对于非稳定期系统扰动较大,导致实验测定误差较大。无论是否考虑水动力作用,Langmuir-Friedrich-VOK模型与试验数据吻合误差都是最小的;其中Langmuir-VOK模型模拟的数据结果比试验数据偏低,其原因可能是Langmuir-VOK模型只考虑吸附剂是均匀的单分子层吸附,各分子之间互不影响;Friedrich-VOK模型模拟的数据结果比试验数据偏高,其原因可能是Friedrich-VOK模型认为吸附剂的吸附是没有选择性的物理吸附,属于非均质吸附;而Langmuir-Friedrich-VOK模型认为吸附剂的吸附是均质吸附与非均质吸附的组合,与电絮凝絮体实际吸附情况最相符。将表2与表3模拟结果与试验结果偏差对比发现,CFD模型得到的模拟结果与试验结果吻合较好,说明水动力因素是影响电絮凝反应器除磷效果的重要因素,采用本研究构建的组合模型能够实现对电絮凝反应器处理效率的精准预测与反应器优化。
3 结论
(1)将法拉第定律与吸附等温线模型结合的VOK吸附动力学模型能够用于模拟电絮凝去除污水中磷酸盐的去除过程,但模拟精度有限。
(2)通过RTD分析可知,本试验研究工况下电絮凝反应器可看作全混流反应器,可以利用全混流模型进行表达,但反应器具有部分死区使得磷酸盐实际平均停留时间小于理论平均停留时间。
取样时间/minLangmuir-VOK模型Freundlich-VOK模型Langmuir-Freun-dlich-VOK模型00 0 0 513.047.143.701510.226.282.503010.437.102.634510.847.232.656012.385.372.86909.883.082.161209.834.042.061809.954.042.06

表3 CFD模型模拟绝对误差Tab.3 Absolute Error of CFD Model
(3)将水动力模型与VOK模型进行组合构建电絮凝反应器的CFD模型能够更加精确地描述电絮凝反应器去除污水中磷的过程,说明水动力因素在电絮凝除磷过程中是不可忽视的重要因素,构建的CFD模型可作为动态吸附模型模拟、优化电絮凝反应器。
(4)无论是否考虑水动力作用,Langmuir-Freundlich吸附等温线与法拉第定律结合的VOK模型与电絮凝除磷的实际过程更加相符,由此推断电絮凝除磷过程是均质吸附与非均质吸附的结合。
猜你喜欢
儿童时代·幸福宝宝(2021年11期)2021-12-21
小学科学(学生版)(2021年4期)2021-07-23
空间科学学报(2021年1期)2021-05-22
现代装饰(2020年4期)2020-05-20
疯狂英语·新读写(2018年3期)2018-11-29
证券法律评论(2018年0期)2018-08-31
资源节约与环保(2018年1期)2018-02-08
山东工业技术(2016年15期)2016-12-01
中国塑料(2015年7期)2015-10-14
湖南大学学报·自然科学版(2014年3期)2014-12-30
