面向船型优化的船舶静水力计算方法*
2018-12-27 00:07蔡寒冰冯佰威常海超
武汉理工大学学报(交通科学与工程版) 2018年6期
蔡寒冰 冯佰威 常海超
(武汉理工大学高性能船舶技术教育部重点实验室1 ) 武汉 430063) (武汉理工大学交通学院2) 武汉 430063)
0 引 言
近年来,基于仿真的设计(simulation-脚based design,SBD)成为研究前沿的热点课题.SBD技术将计算流体力学(computational fluid dynamics,CFD)技术、计算机辅助几何设计(computational aided design,CAD)技术,以及优化算法等有机地结合到一起,形成了一种新的船型设计模式,具有高效、准确和适用性强等特点,被广泛应用于船型优化设计.
优化问题包括设计变量、约束条件和目标函数.为了满足工程实用性,约束条件在优化问题中起关键作用.具体到船型优化设计,一般会以静水力数据作为约束条件,如为保证优化后的船型浮态不发生变化,选择浮心位置作为约束;为不影响船舶的营运性,选择排水量作为约束条件;为不影响船舶的技术性能,选择湿表面积等作为约束.因此,在船型优化过程中,必须能够实时计算船舶静水力参数.
刘春雷等[1]使用加密型值表对47 500 t散货船“太行128”进行计算,在型宽、型深及船长方向对船进行细分,读取型值点后对型值点进行直接积分,得到了可靠的结果;王建勋等[2]使用三次样条函数对型值表数据进行插值后反求样条曲线上的点,对这些点积分得到横剖面面积,最后用辛普森积分对横剖面面积进行积分得到全船的排水体积;周念福等[3]对CATIA软件进行了二次开发,使其可以直接对船体曲面切片,通过调用相关函数对这些切片进行计算,最后得出船体体积.
以上的几种方法,加密型值表法及样条函数法需要大量数据,对船型优化而言,计算比较繁琐;基于商业软件二次开发的静水力程序需要对相关软件进行集成,增加了集成的成本与难度,故该方法也不能很好地适应船型优化设计的需要.
基于此,为满足船型优化的需要,本文采用了一种基于面元法的船舶静水力计算方法[4],该方法首先要提取船体曲面的型值点,再使用这些型值点建立二维参数面元,然后建立对单个面元的数学模型,最后对面元进行积分得到相应的静水力性能数据.
1 船体型值点的提取
目前,三维船体模型多是基于非均匀有理B样条(non-uniform rational B-spline ,NURBS)表达的,而NURBS曲面为
0≤u,v≤1
(1)
式中:wij为权因子;dij为控制顶点;Ni,k(u),Ni,l(v)分别为u向k次和v向l次的规范B样条基,u、v则是节点矢量.
对于任意曲面,获取了曲面NURBS的次数、控制点,以及权因子的信息,可以求得曲面上的点的型值.例如,要在曲面上取100个型值点(此处u方向取10个值,v方向取10个值,记为10×10),就可以分别对u、v取0/9,1/9,2/9,…,9/9,带入到式(1)中,得到相对应的型值点数据.NURBS原理和算法见参考文献[5].
根据上述方法,就可以获取船体曲面上的离散型值点.本文对DTMB5415船型的型值点进行了提取,见图1.该船型有三个面,本文对每个面取30×20,即在方向取30个值,方向取20个值,得到了如图1的型值点点云.同时,对得到的型值点进行点/曲面偏差分析,得到这1 800个型值点与曲面的平均距离为2.428×10-7m,满足船型优化的精度要求.

图1 船型DTMB5415型值点提取
2 基于面元法的静水力计算原理
基于面元法的静水力计算方法首先将船体曲面离散为二维参数面元, 再依据高斯定理,将对船体的三维体积分转化为对面元的二维面积分,最后对所有面元进行积分,就可以得到该船的静水力性能数据.
2.1 二维参数面元的建立
根据第一节所述的提取型值点的方法提取船体曲面的型值点,将这些型值点按顺序划分为四边形单元,每一个单元可以看作是一个面元,船体面元见图2.而从船体曲面上提取出的单个面元,见图3,其中,是任意面元的四个角点.

图3 船体单个面元

[6]
(2)
式中:xi,yi,zi(i=1,2,3,4)分别为单个面元的四个节点坐标值;(ξ,η)为图4中所示的等参坐标;Ni为二维线性形函数,其表达式为
(3)
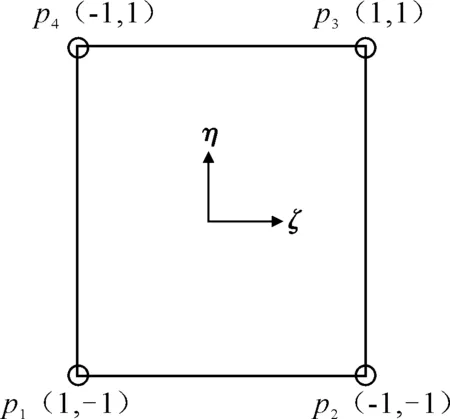
图4 4节点面元等参坐标
2.2 基于高斯定理的静水力计算模型
船舶水下体积V是由船体湿表面Swet和水线面Swl围成,根据高斯定理(4)式,可以将对船体的三维体积分转化为对面元的二维面积分.再根据具体问题,取适当的P,Q,R值,就可以求得相应的静水力性能数据.

(4)
选取P=v,Q=y,R=0,根据式(5)就可以求得船舶的排水体积:
(5)
选取P=0.Q=y2/2,R=0,根据式(6)就可以求得船舶的浮心纵向位置.
(6)
同理,水线面面积、湿表面积、中横剖面面积为
(7)
横稳性半径、纵稳性半径可由式(8)计算得:
(8)
各船型系数为
CB=
Cp=
Cvp=
(9)
2.3 面元上函数数值计算
根据2.1内容,船体曲面上的面元被转换成了二维参数线性面元,且每一个面元都是正则的,则每一个面元的法向量可为[7]
(10)
式中:J为雅克比行列式;Υξ(ξ,η),Υη(ξ,η)分别为面元切平面内ξ方向、η方向的方向矢量.
根据高斯-勒让德积分公式,则船体积分为

(11)
式中:m1,m2为节点数,由于本文采用2×2的二维线性参数单元,即此处为2;wi,wj为高斯求积公式的加权系数,本文中为1;参数ξi=±0.577 350 269 2;ηi=±0.577 350 269 2.
3 船舶静水力计算结果及对比
本文开发了基于面元法的船型静水力计算程序.同时,为了验证上文原理的有效性和程序的实用性,分别用商业软件maxsurf和本程序对母型船的静水力性能进行了计算,并选取了排水体积、浮心纵向位置、湿表面积以及方形系数四个参数进行了对比.
KCS船型和S60船型的每个面点数取80×30,对每个船型的设计水线处的静水力性能进行计算,即KCS船型取0.341 8 m处水线(记为0.341 8水线,同时若没有特别说明,水线的单位均为m),S60船型取0.163水线.此时,所用KCS船型船模有四个面,采用第一节所述的方法对船型曲面进行离散,离散的型值点共有9 600个;S60船模有二个面,离散的型值点共有4 800个.计算结果分别见表1~2.

表1 KCS船型maxsurf计算结果与程序计算结果对比

表2 S60船型maxsurf计算结果与程序计算结果对比
本文选取DTMB5415船型,每个面取80×30,并选取3条水线,分别为0.15水线、0.248水线和0.35水线进行计算.所用DTMB船型船模共有3个面,离散的型值点共有7 200个.计算结果分别见表3~9.
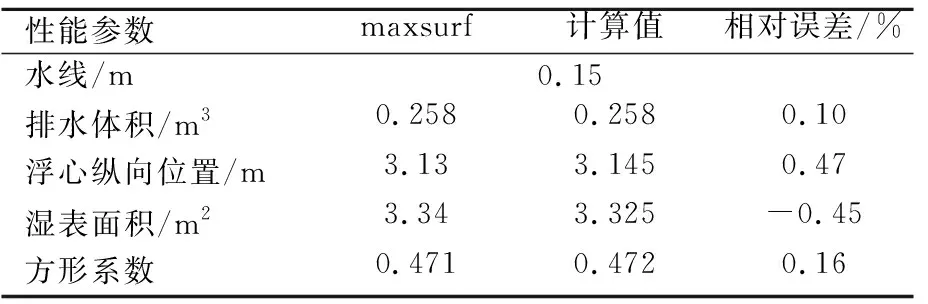
表3 80×30点数下0.15水线处DTMB5415船型maxsurf计算结果与程序计算结果对比
本文对DTMB5415船型分别再取30×20,50×30,100×30三种密度的型值点,计算该船型在设计水线处的静水力性能.计算结果见表6~8.
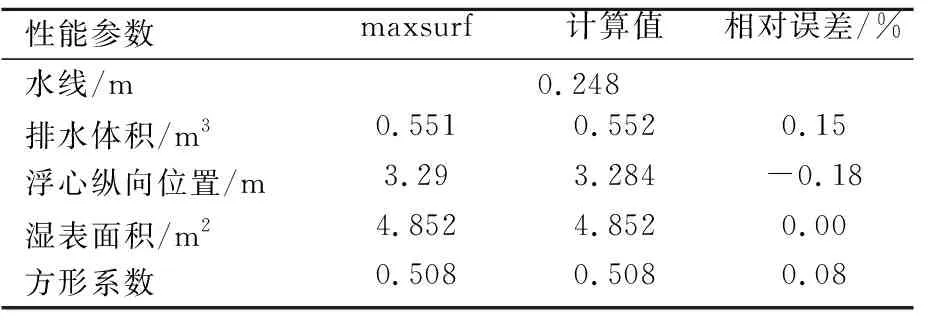
表4 80×30点数下0.248水线处DTMB5415船型maxsurf计算结果与程序计算结果对比

表5 80×30点数下0.35水线DTMB5415船型maxsurf计算结果与程序计算结果对比

表6 30×20点数下0.248水线处DTMB5415船型maxsurf计算结果与程序计算结果对比

表7 50×30点数下0.248水线处DTMB5415船型maxsurf计算结果与程序计算结果对比
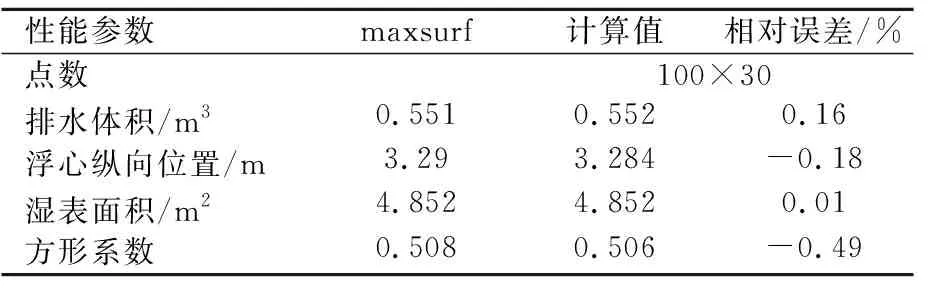
表8 100×30点数下0.248水线处DTMB5415船型maxsurf计算结果与程序计算结果对比

表9 不同船型在不同点数下的计算时间 s
表9中的计算时间是在不同的点数下,按该船型型深平均取5条水线,对这5条水线的计算时间取平均数所得.
由表1~2和表3~5可知,基于面元法的静水力计算方法可以较好地计算不同的船型、不同的水线,具有良好的适用性,同时具有较好的精度.
由表3~5可知,当水线越高时,计算结果越好.由于DTMB5415船型具有球鼻艏,当水线越低时,船体曲面变化越剧烈,此时,0.15水线处的精度相较于0.248水线以及0.35水线处的数据的精度较低,即曲面变化越剧烈,基于面元法的静水力计算方法的精度越低,反之越高.
表4和表6~8可知,型值点越多,计算结果也越好.同时,当每个面的点数大于1 500个,全船总型值点数大于4 500个时,计算结果的误差均在0.5%以下,可以很好地满足船型优化设计的需要.同时,根据表9显示,型值点数越多,计算时间越长.故当船型的型值点数大于4 500个时,本方法可以很好地进行船型优化的静水力计算.
4 结 论
1) 基于面元法的船舶静水力计算方法能很好地适应DTMB5415,KCS,S60等标准船型,具有良好的适用性.
2) 基于面元法的船舶静水力计算方法具有较好的计算精度,满足船型优化设计的需要.
3) 在船型优化中,基于面元法的船舶静水力计算方法只需要预先设定好计算所需要的点数和计算水线,便可以对目标船型进行计算,集成到船型优化平台上较为便捷;同时,由于其可以自动对船型优化过程中新生成的船型的三维曲面进行读点计算,故其能较好地适应船型优化的需要;此外,该方法计算时间较短,对于需要计算大量船型的船型优化问题具有一定优势.
猜你喜欢
无线电工程(2019年11期)2019-10-30
数学小灵通·3-4年级(2017年12期)2018-01-23
现代传输(2016年3期)2017-01-15
现代传输(2016年2期)2016-12-01
小学生导刊(低年级)(2016年11期)2016-11-14
装备学院学报(2016年5期)2016-11-14
新农业(2016年5期)2016-05-23
火控雷达技术(2016年1期)2016-02-06
井冈山大学学报(自然科学版)(2013年4期)2013-10-27
航天器环境工程(2011年2期)2011-01-14