
电力机车定速模式的半实物仿真研究与实现
2019-01-15 12:18王龙刚郑慧丽
现代工业经济和信息化 2018年17期
王 清,王龙刚,郑慧丽
(中国中车永济电机公司,陕西 西安 710016)
引言
电力机车牵引控制系统软硬件设计完成后,为了保证实际装置及软件程序的可行性和可靠性,通过半实物仿真试验验证是必不可少的。在牵引控制系统设计中,考虑司机驾驶方便和机车牵引力的有效利用,设计一种定速模式可以很好地解决此类问题。当司机按下定速模式按钮后,机车自动保持当前速度而不需要人为操作。采用这种模式,当长时间行车后,司机不用再去控制手柄,减轻了疲劳,同时减少了不必要的车速变化,提高了牵引力的利用率。为了检验定速模式的控制效果,搭建了半实物仿真平台进行实时仿真验证。
近年来,数字仿真技术以其经济性、可控性、安全性等特点得到了广泛应用[1]。然而遗憾的是,它却没有与硬件I/O的接口,不支持实时仿真。针对该软件的不足,进行实时仿真就成为了解决该问题的突破口。
半实物仿真就是通过工程仿真或者是对实物在回路的实时系统建立动态模型,使得工程系统的设计过程变得更加简单[2]。它的可测试性使得开发者能够把计算机使用到任何需要应用的地方;其应用的灵活性使它能够应用于解决最复杂的仿真和控制问题,目前,它已经成功应用于硬件在回路实时仿真测试或者快速原型的开发、控制与测试领域。
本文利搭建的半实物仿真平台实现了电力机车定速模式的试验验证。该平台由控制上位机、两台TCU及三台仿真机组成,模拟电力机车整车运行过程。
1 半实物仿真硬件平台搭建
在半实物仿真测试系统中,牵引控制单元(TCU)为真实设备,搭建整车被控对象主电路模型和机车动力学模型运行在仿真机中。半实物仿真硬件平台主要包括:3台上位机、3台仿真机和2台牵引控制单元(TCU)。其中仿真机1和2的作用为模拟牵引控制单元的控制对象,在本文中主要由弓网模型、两个整流和三个逆变电机的主电路模型;仿真机3为动力学仿真机,主要模拟机车动力学运动关系。TCU中内嵌控制程序,主要作用是对被控对象进行控制。图1为半实物仿真硬件平台框图。
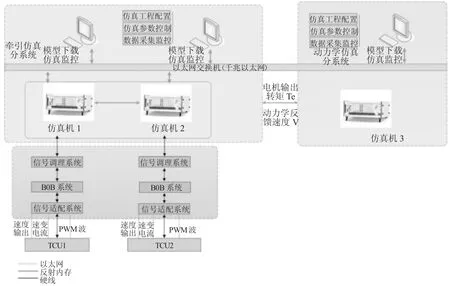
图1 半实物仿真硬件平台框图
本文搭建半实物仿真平台实现电力机车定速模式的测试。硬件平台实现的过程为:仿真中1和2运行电力机车两个整流和三个逆变和电机模型,模拟整车电传动系统;两个TCU分别控制仿真机1和2中的主电路模型。试验开始时,TCU1和TCU2通过硬线I/O发送PWM波,使主电路电机运行起来,电机输出转矩通过反射内存信号传送给仿真机3中的动力学模型中,动力学模拟机车运行实时输出电机的转速和机车的速度,再通过反射内存反馈速度给仿真机1和2,实现速度的闭环。在此过程中,通过动力学模型实时调节机车的负载,并输出不同的速度给TCU进行速度定速调节。
2 软件流程分析
图2给出了测试过程中的具体操作流程。具体过程如下:
1)开始阶段,机车工作选择在定速模式下;
2)定速速度为v;
3)TCU从动力学模型中实时获取机车实际定速速度为V,判定V与v差值在±1 km/h范围内;
4)由动力学输出不同的牵引力或制动力;
5)随着负载的变化,TCU控制机车调整牵引力/电制力;
6)在负载变化的过程中,TCU始终实时获取机车实际速度V判定,V与v差值在±1 km/h范围内;
7)结束。
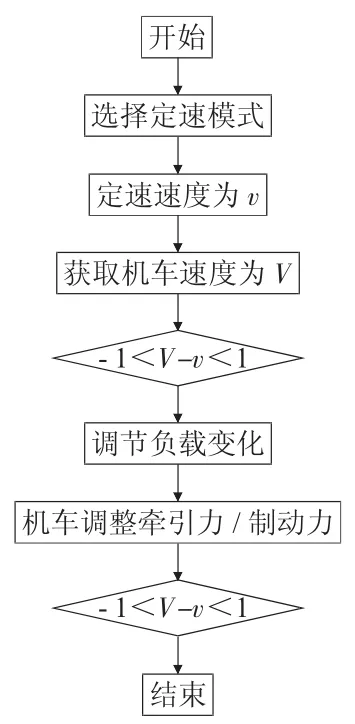
图2 测试操作流程图
3 试验结果分析
分别选择定速50 km/h和90 km/h两个定速点按照上图软件流程依次试验。定速50 km/h和90 km/h试验结果见图3和图4。
3 468 s时电力机车实施定速50 km/h,由半实物平台动力学模型依次提供机车反方向10%、20%、30%、40%、50%、60%、50%、40%、30%、20%、10%的电制力,3 496 s时动力学输出制动力为0。动力学依次提供与机车同方向10%、20%、30%、40%、50%、60%、50%、40%、30%、20%、10%的牵引力,3 909 s时动力学输出牵引力为0。从试验结果可见,随着负载的变化,机车调整牵引力/电制力。当动力学输出转变为牵引10%的过程中,初始阶段机车尚未转变为电制动,列车速度迅速增加,最高瞬时达到50.6 km/h,此时被试机车电制功率增加,列车速度开始迅速降低。在负载变化的整个过程中,列车速度始终控制在50±1 km/h 范围内,试验结果满足预期设计要求。

图3 定速50 km/h测试波形

图4 定速90 km/h测试波形
707 s时电力机车实施定速50 km/h,由半实物平台动力学模型依次提供机车反方向10%、20%、30%、40%、50%、60%、50%、40%、30%、20%、10%的电制力,969 s时动力学输出制动力为0。动力学依次提供与机车同方向10%、20%、30%、40%、50%、60%、50%、40%、30%、20%、10%的牵引力,1 162 s时动力学输出牵引力为0。从试验结果可见,随着负载的变化,被试机车调整牵引力/电制力;当陪试机车电制50%时,列车速度瞬时降低到89 km/h,被试机车的牵引力迅速增加,列车速度增加到89.5 km/h。在负载变化的整个过程中,列车速度始终控制在(50±1)km/h范围内,试验结果满足预期设计要求。
4 结语
本文所搭建的电力机车半实物仿真模型,以及所设计的定速控制算法在半实物仿真平台和牵引控制单元(TCU)中能正确运行。实验结果表明,定速模式能够在全速度范围内按照预期的程序算法设定的目标实现。验证了TCU程序中设计的定速算法的正确性。为后续系统在现场试验起到关键的指导作用,同时缩短及降低了试验周期和成本。
猜你喜欢
现代城市轨道交通(2022年12期)2022-12-27
现代城市轨道交通(2022年11期)2022-11-21
中学生数理化·七年级数学人教版(2022年3期)2022-03-16
哈尔滨铁道科技(2020年3期)2021-01-18
哈尔滨铁道科技(2020年3期)2021-01-18
减速顶与调速技术(2018年1期)2018-11-13
作文小学中年级(2018年10期)2018-10-29
电子制作(2018年1期)2018-04-04
科技创新与应用(2017年26期)2017-09-12
中学生数理化·高一版(2016年4期)2016-11-19
