ZigBee和模糊控制的智能胎压监测制动系统
2019-01-17 03:11,,,
单片机与嵌入式系统应用 2018年12期
,,,
(西安工程大学 电子信息学院,西安 710048)
引 言
随着人类社会经济水平和科技水平的不断提高,汽车已逐渐成为人们日常生活中不可替代的工具。随着汽车使用量的不断增加,汽车引发的道路交通事故等一系列社会问题也日益突出,汽车安全问题在世界各地都有着不同程度的困扰。据交通局统计数据,目前我国高速公路上70%的交通事故为轮胎气压问题引起的,而爆胎是目前汽车交通事故的重大杀手之一。本文设计了基于模糊控制带刹车联动作用的智能胎压监测制动系统,通过胎压胎温信息和模糊控制输出制动力的大小,实现自动刹车动作,减少事故发生率[1-2]。
1 胎压监测系统框架设计
基于ZigBee的胎压监测系统框架如图1所示。ZigBee作为一种无线通信技术,被广泛应用于工业领域[3]。该部分主要分为4个从节点,分别对应4个轮子,一个主节点作为主控制器和制动系统。传感器将采集到的胎压数据传输给从节点,然后从节点将数据经过A/D转换处理,再经过ZigBee无线通信模块将数据传递给主控制器,胎压信息与主控模块事先设置的胎压范围进行比较,进而决定对制动系统进行控制。
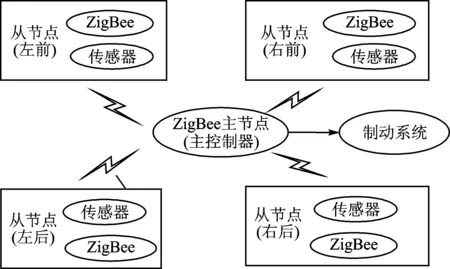
图1 基于ZigBee的胎压监测系统框架
2 系统硬件设计
2.1 无线通信网络
目前因为6LoWPAN无线传感网络技术使用了IPv6技术,使其可以接入庞大的地址空间而受到欢迎,普遍认为这种技术会成为物联网领域的事实标准。它和ZigBee有很多相似点,表1为ZigBee和6LoWPAN两种技术标准的简单比较。
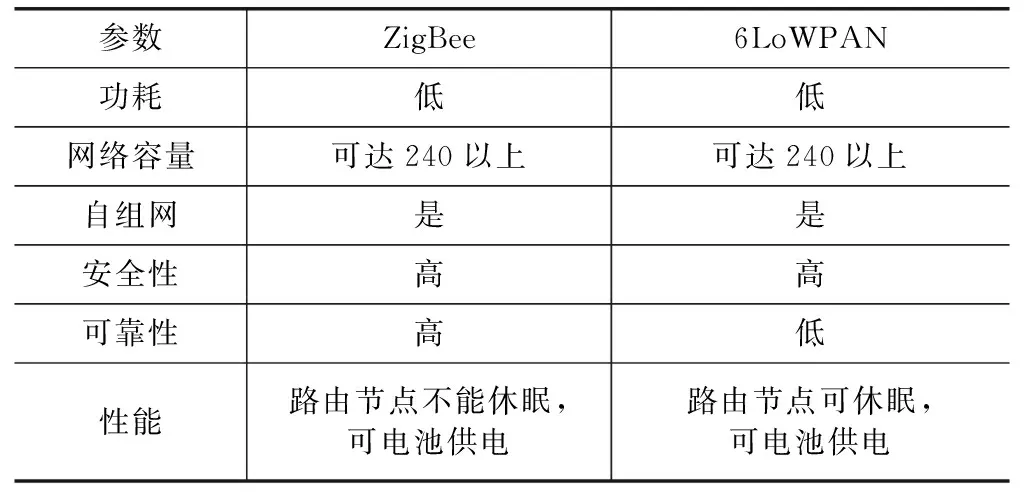
表1 ZigBee和6LoWPAN技术比较
由表1可知,ZigBee和6LoWPAN在功耗、网络容量、自组网、安全性方面相差不大,但ZigBee的可靠性高于6LoWPAN,因本文设计的系统可靠性要求较高,所以选择ZigBee作为传感器与主控制器之间的通信模块。
2.2 数据采集
为了对轮胎的压力和温度进行实时采集,本文采用英飞凌SP400胎压监测传感器,相较于SP370有如下特点:封装体积更小;能耗更低,静态电流从550 nA降至245 nA;存储容量更大,Flash增加了一倍;测量精度更高,只需一个26 MHz就可同时支持315 MHz和434 MHz的工作频率[4]。
2.3 发射模块
CC2530是一个具有IEEE802.15.4协议的无线收发器,同时具有数据包过滤模块和地址识别模块,从而可以快速定位到各个车轮的压力和温度值。为了降低功耗,在汽车未启动的时候,收发模块处于休眠状态。汽车启动时,通过加速度来唤醒MCU工作。通过不断检测启动时的轮胎压力和温度,将采集到的数据经滤波、A/D转换、数字解调后输出数字信号。发射模块框图如图2所示[5]。
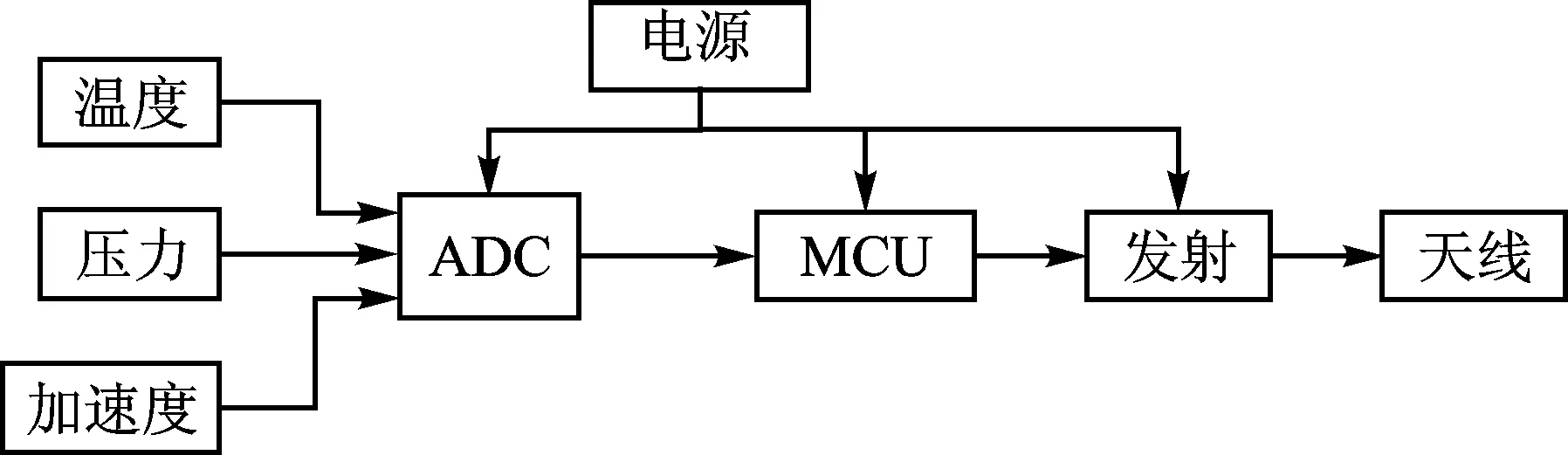
图2 发射模块框图
2.4 接收模块
接收模块主要是通过天线将发射过来的胎压、温度、加速度数据经过MCU处理,加上模糊控制部分实现随着胎压、温度的变化,对制动力大小进行自动调节,当数据超过设定的阈值时,制动力达到最大值,从而实现胎压和制动系统的联动作用[6]。接收模块框图如图3所示。

图3 接收模块框图
3 制动系统软件设计
系统上电后对CC2530和显示器初始化,首先获取加速度的值并判断其是否超过设定值,如果超过这个值,则获取胎压和胎温的数据,然后对获取到的数据判断是否有效,如果有效,则在液晶上显示,同时进入模糊控制环节,控制制动力的大小。其制动系统软件总体流程如图4所示[7]。

图4 制动系统软件总体流程图
4 制动模糊控制器设计
4.1 模糊控制结构设计
模糊控制器是一种基于规则或知识的系统。它是由IF-THEN规则组成的知识库,一个模糊规则是用连续隶属度函数对所描述的相关句子做出IF-THEN形式的描述,主要用于解决传统方法难以解决的复杂、非线性问题。
该模糊控制器的输入量为轮胎的压力和温度,输出量为制动力的大小。首先胎压和胎温经过模糊化得到模糊输入量,再经过模糊推理机匹配模糊规则中的规则,最后再经过解模糊化输出制动力的大小,从而可达到自动控制车辆的行驶速度[8]。其制动模糊控制器原理图如图5所示。

图5 制动模糊控制器原理图
4.2 输入输出量的确定

(1)

(2)
在式(1)、式(2)中,K为比例因子。设比例因子K均为0.1,轮胎胎压F的模糊论域为[0,30],轮胎胎温T的模糊论域为[0,11],制动力Br的模糊论域为[0,1.6]。轮胎温度的语言变量T为很小(VS)代表温度很低,小(S)代表温度较低,中(M)代表温度最佳,大(B)代表温度较高,很大(VB)代表温度很高。轮胎胎压的语言变量F为很小(VS)代表胎压很低,小(S)代表胎压较低,中(M)代表胎压最佳,大(B)代表胎压较高,很大(VB)代表胎压很高。输出语言变量制动力Br为很小(VS)代表制动力很小,小(S)代表制动力较小,中(M)代表制动力最佳,大(B)代表制动力较大,很大(VB)代表制动力很大。输入输出变量隶属度函数的取值需要根据控制系统特性进行合理的选择。模糊控制器的变量均成线性变化,因此,在此系统选用三角形隶属度函数,使其在整个论域中均匀分布,其输入输出变量隶属度函数定义如图6(a)、图6(b)、图6(c)所示。
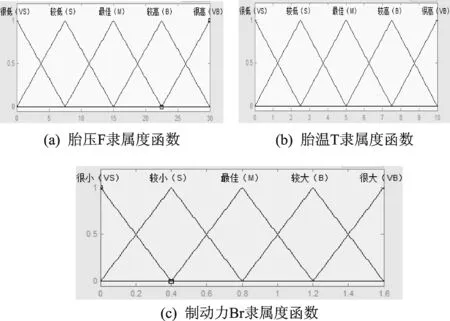
图6 输入输出变量隶属度函数
4.3 模糊控制规则的建立
模糊控制规则是设计模糊控制系统的核心,其实质就是将驾驶员的驾驶经验加以总结而得到一个包含各种模糊条件语句的集合。模糊控制规则的确立原则是必须保证控制系统输出响应的动静态特性能够达到最佳。
根据实际影响汽车制动距离有效参数的分析,当胎温T超过正常值范围时,制动力Br应随着胎温的增加而增加,当胎压F低于或高于正常情况下的胎压时,为避免发生事故,制动力都应增加。由这些关系可得到表2所列的模糊控制规则,图7是输出特性曲线。

表2 模糊控制规则
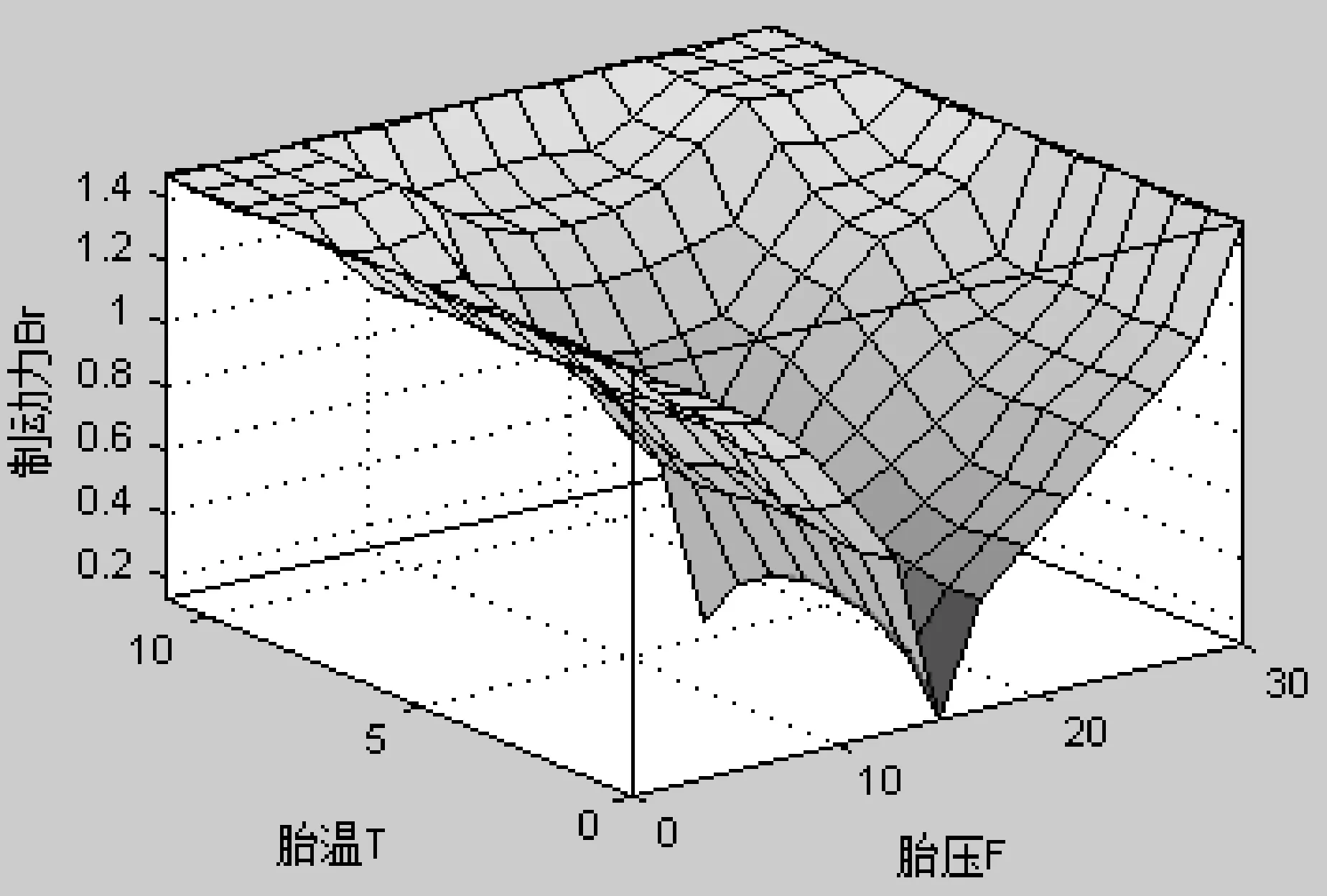
图7 制动力输出特性曲面
结 语

猜你喜欢
电子乐园·下旬刊(2022年6期)2022-05-16
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
汽车维修与保养(2021年1期)2021-05-27
——元征X-431标定胎压传感器的方法
汽车维护与修理(2021年19期)2021-04-14
电子制作(2017年17期)2017-12-18
故事作文·高年级(2017年10期)2017-10-19
小学阅读指南·低年级版(2016年1期)2016-09-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22