同步磁阻电机模型参考自适应法无位置传感器控制
2019-01-22 04:39杨旭东王云冲沈建新
电机与控制学报 2019年11期
杨旭东 王云冲 沈建新

摘 要:針对由于同步磁阻电机(SynRM)铁心饱和(包括直轴与交轴的交叉饱和)现象严重,导致传统无位置传感器控制方法难以实现高性能控制的问题,提出一种考虑铁心饱和现象的基于模型参考自适应法(MRAS)的无位置传感器控制策略。利用有限元仿真软件得到电机若干工况下的电感参数,建立查表数据,运用查表法得到不同工况下的实时电感参数,将该参数应用于模型参考自适应法无位置传感器控制算法中,可以减小铁心饱和对电机无位置传感器控制的影响,实现电机在任意位置起动和宽速度范围稳定运行。仿真与实验验证了所提出无位置传感器控制方法的有效性。
关键词:同步磁阻电机;交叉饱和;模型参考自适应系统;无位置传感器控制;闭环起动
DOI:10.15938/j.emc.2019.11.001
中图分类号:TM 341
文献标志码:A
文章编号:1007-449X(2019)11-0001-09
收稿日期: 2018-12-06
基金项目:国家自然科学基金(51577165)
作者简介:杨旭东(1993—),男,硕士研究生,研究方向为同步磁阻电机无位置传感器控制;
王云冲(1987—),男,讲师,研究方向为电机设计及其控制;
沈建新(1969—),男,博士,教授,博士生导师,研究方向为电机拓扑与驱动控制。
通信作者:王云冲
MRAS sensorless control for synchronous reluctance motors
YANG Xudong, WANG Yunchong, SHEN Jianxin
(College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China)
Abstract:
A sensorless control strategy based on the model reference adaptive system (MRAS) method was proposed to solve the problem that traditional rotor position sensorless control method can hardly realize high performance because of serious core saturation of synchronous reluctance motor (SynRM), including cross saturation between the daxis and qaxis. The inductance parameters of the motor under several operation conditions were obtained by finite element simulation software, and the lookup table data were established. The lookup table method was used to obtain the inductance parameters under various operation conditions, the influence of core saturation on the sensorless control of the motor was reduced by applying this parameter to MRAS control algorithm, without a rotor position sensor, was started at a random initial position, and was operated the wide speed range. Simulation and experiment results are presented to verify the proposed sensorless control strategy.
Keywords:synchronous reluctance motor; cross saturation; model reference adaptive system; rotor position sensorless control; closedloop startup
0 引 言
同步磁阻电机具有结构简单、材料成本低廉、对温升不敏感、转子鲁棒性强、转矩密度和效率较高、调速范围广等优势[1],且控制上与永磁同步电机比较相似。因此,国内外都对其进行了研究,以期在某些应用场合(例如风机、水泵等)能够替代永磁同步电机或异步电机[2]。意大利帕多瓦大学的Morandin等人[3]甚至提出在电动汽车发电机中也采用同步磁阻电机实现大转矩起动和宽速度范围内的发电运行。
在传统逆变器供电的同步电机驱动系统中需要安装转子位置传感器,但传感器会带来诸多问题[4]。因此无位置传感器控制具有其优势。本文研究的主要内容就是实现同步磁阻电机无位置传感器控制系统。
同步磁阻电机从结构上来看可以当作是永磁同步电机去掉永磁体并增大凸极比,所以永磁同步电机的无位置控制方法对于同步磁阻电机具有借鉴意义。
在高速运行阶段,同步磁阻电机可以像永磁同步电机那样采用基于反电势无位置传感器控制方法[5-6],但是该方法在低速时难以实现。文献[7-8]从电感矩阵的常值出发,提出了以扩展反电势描述的电机电压方程。凸极永磁电机和同步磁阻电机在转速为零时可以存在非零的扩展反电势,从而使得低速甚至零速时的转子位置观测成为可能。文献[9-10]提出了基于电机电流模型和电压模型的磁链观测法电机无位置传感器控制,该方法对同步磁阻电机无位置控制具有借鉴意义。文献[11]通过计算磁通预估转子的位置实现同步磁阻电机无位置传感器控制,然而这种方法不适用于低速运行状态。文献[12]将高频电流注入法和磁链观测法相结合并且实现算法在2种方法之间平滑过渡。但是,文献[7-12]所提出的无位置传感器控制方法都是依赖于电机参数的,而同步磁阻电机最大的特点之一就是电感参数随运行工况有较大改变,因此上述无位置传感器方法受到制约。
本文提出的无位置传感器控制算法是一种基于模型参考自适应系统(model reference adaptive system,MRAS)的電机转子位置或速度信息的估算方法。MRAS主要由参考模型、可调模型和自适应律等3部分组成。参考模型和可调模型的输入量V是电机的电压、电流等状态量,参考模型输出电机状态量为x,可调模型的输出为对电机状态的估算量x^自适应律的输入参考模型和可调模型的输出偏差,其输出为可调参数ζ,同时也是被估算的状态量,自适应律通过Lyapunov稳定性理论或Popov超稳定理论进行设计。合适的自适应律可以实现对ζ的实时估算,同时也调节可调模型,使得参考模型和可调模型的输出偏差为零,这时,ζ就是对电机真实状态量的估算。
MRAS方法目前在永磁同步电机中已有相关研究与应用,但在同步磁阻电机中还不多见,依据状态量x的不同,参考模型和可调模型的实现方式可以分为磁链模型、反电势模型、无功功率模型和电流模型。文献[13]提出使用磁链模型实现MRAS方法对电机转子位置估算,但是磁链模型中存在纯积分结构,需要采用非理想积分以避免纯积分偏移。文献[14]提出了一种MRAS的电压模型,由于没有积分结构,相对于磁链模型具有更快的动态性能,但是估算的精度容易受到电机电感、电阻等参数准确性的影响。电流模型是目前国内外应用较多的一种MRAS估算方法,综合来说其响应快,受电机参数影响较小[14-16]。
通过MRAS方法,电机的转子位置和速度可以通过自适应律的Lyapunov稳定性理论或Popov超稳定理论在起动阶段就快速收敛到真实的电机状态值,从而可以在任意转子位置实现闭环起动。这种方法已经在永磁同步电机中得到验证[17]。
但是,同步磁阻电机存在比较严重的饱和现象,特别是交叉饱和现象,使得电机的Ld、Lq电感随着电流的改变而发生较大变化。如果使用固定的Ld、Lq电感参数进行电机转子位置和速度的估算则会随着电流的变化发生较大的估算偏差。
本文提出一种基于模型参考自适应法且同时考虑同步磁阻电机的磁路饱和(包括交叉饱和)现象的电机转子位置估算方法,实现电机从起动到高速的宽速度范围运行。
1 磁路饱和(包括交叉饱和)
交叉饱和(即d、q轴间的磁交叉耦合)是电机中的一种普遍现象,这种现象在永磁同步电机中常常可以忽略,但是在同步磁阻电机中非常突出[18]。
图1是同步磁阻电机经有限元分析仿真得出的同步磁阻电机磁链和电流的关系,λd、λq是同步磁阻电机d轴和q轴磁链,id、iq是同步磁阻电机d轴和q轴电流。λd(id,0)与λd(id,24 A)分别表示电流iq为0和24 A时,d轴磁链λd随电流id变化的规律;λq(0,iq)与λq(24 A,iq)的含义类似。如果没有交叉饱和,图中λd、λq 2根曲线应该分别重合。当电流达到一定大小的时候,磁路开始出现饱和,图中的曲线开始呈非线性关系。所以图1证明了同步磁阻电机磁路饱和(包括交叉饱和)现象的存在,同时也可以表示为:
λd=λd(id,iq),
λq=λq(id,iq)。(1)
Ldq=λdiq≠0,
Lqd=λqid≠0。(2)
式(1)也可以改写为
λdq=LdLdqLqdLqidq。(3)
式中:交叉互感Ldq和Lqd通常认为是相等的,电感参数都是随电机电流变化的。
通过数学转换和引入共轭向量等方法可得到
ε=tan-12LdqLd-Lq。(4)
式中ε是与d-q轴交叉饱和相关的角度,定义为交叉饱和角[18]。
在文献[18]中详细说明了无论是电机的磁链模型还是电流电压模型,都可以推导得出式(4)中的ε,其表征了由交叉互感引起的电机转子位置估算的误差。如果Ldq=0,则ε=0,说明如果不存在交叉互感,则误差角为0。现在的绝大多数电机无位置传感器控制算法都是通过估算电流、磁链或者电压等状态量实现对电机转子位置和速度的估算,所以绝大部分无位置传感器算法实际上都会受交叉饱和影响。而且不同的工作状态下,误差角度ε也不相同。因此想获得一个高性能的无位置传感器控制,那么就不能采用固定的电机参数模型。
为了解决电机交叉饱和所带来的问题,利用有限元方法进行仿真,求解若干个工作状态,记录每个工作状态下的d轴和q轴电流以及此时如图1所示磁链值,然后通过三维查表法,拟合出不同id、iq下对应的λd、λq,再简单的计算出Ld=λd/id、Lq=λq/iq。这样表面上看电感表达式很简单,但是实际已经包含了铁心的饱和及交叉饱和的影响。
2 MRAS实现原理
MRAS应用于电机转速估算应用中的基本思想是以电机的数学模型为基础构建参考模型和可调模型,通过反馈环节迫使可调模型逼近参考模型[17-19]。
2.1 同步磁阻电机数学模型
同步磁阻电机在d-q轴坐标系上的数学模型可以表示为
diddtdiqdt=-RsLdωLqLd-ωLdLq-RsLqidiq+1Ld001Lquduq。(5)
式中:Rs为电机定子电阻;ω为电机的电角速度;id、iq和ud、uq分别是电机d-q轴定子电流和电压。由于第1节中已经说明利用查表法得到電感参数Ld、Lq,因此,式(5)中不需要出现表征交叉饱和的电感参数Ldq。
将式(5)中电流量、速度全部换成估计的电流量和电角速度,可以得到
di^ddtdi^qdt=-RsLdω^LqLd-ω^LdLq-RsLqi^di^q+
1Ld001Lquduq。(6)
再通过积分运算得到
i^di^q=∫-RsLdω^LqLd-ω^LdLq-RsLqi^di^q+1Ld001Lquduqdt。(7)
于是根据电机Rs、Ld、Lq等参数以及ud、uq可以从电机起动时估算出电机的电流i^d、i^q。
2.2 转速与位置估算
把同步磁阻电机的实际电机模型式(5)当作参考模型,将估计模型式(6)当作可调模型,式(7)得到的d-q轴电流估算i^d、i^q作为可调模型的输出量x^,将电机实际电流id、iq作为参考模型输出量x。x^和x之间的误差通过自适应律调节可调模型,使得i^d、i^q快速收敛到真实值。
定义状态误差e,用式(5)减式(6),可以得到误差的状态方程为
dedt=Ae+Ji^(ω-ω^)。(8)
其中:
A=-RsLdωLqLd-ωLdLq-RsLq,(9)
J=0LqLd-LdLq0,(10)
e=id-i^diq-i^q,(11)
i^=i^di^q。(12)
通过Popov超稳定理论设计自适应律,Popov稳定性理论确定自适应律的前提条件是系统的前馈系统为线性非时变且传递函数为严格正实的及非线性时变反馈系统满足波波夫不等式。文献[17]中严格证明了式(6)构成的系统满足以上2个前提条件。
MRAS最常见的自适应律为比例积分,可设计为
ω^=∫t0F1(v,t,τ)dτ+F2(v,t)+ω^(0)。(13)
其中:
F1(v,t)=kieTJi^,F2(v,t)=kpeTJi^。(14)
把式(9)、式(11)、式(12)和式(14)带入式(13)中,可以得到电机转速估算为
ω^=ki∫t0LqLdidi^q-LdLqiqi^d-LqLd-LdLqi^di^qdτ+
kpLqLdidi^q-LdLqiqi^d-LqLd-LdLqi^di^q+ω^(0)。(15)
转子位置可以表示为
θ^=∫ω^dt+θ0。(16)
式中θ0是电机初始转子位置角。
图2和图3为利用电机的d-q轴电压、电感和电阻等参数实现转子速度与位置估算框图。图中电感参数Ld、Lq均由查表法更新实时的电流id、iq得到。
本文采用的控制策略是最大转矩电流比(maximum torque per ampere, MTPA)控制,同步磁阻电机的转矩电流比为
f=Te(i2d+i2q)=34p(Ld-Lq)isin2α。(17)
式中:α为电流矢量超前d轴的角度;i为电流矢量幅值。如果电机电感参数Ld、Lq为常值时,当α=π/4时,f是最大值,即最大转矩电流比控制方式。但是由于同步磁阻电机存在交叉饱和和磁路饱和,Ld、Lq随着电流变化而变化,当α=π/4并不能保证转矩电流比最大。
利用有限元分析,可以仿真得到电机的最大转矩电流比曲线如图4中实线所示。为了更加精确地实现最大转矩电流比控制,可在最大转矩电流比曲线上建立id、iq对应关系,选取若干个点利用二维查表法,根据已知的iq得到最大转矩电流比下对应的id。
图5为基于MRAS的同步磁阻电机无位置传感器控制框图,采用MTPA的矢量控制策略。给定转速ωr与磁链观测估算得到的转速ω^的差值经过PI调节,得到电流iqr,利用MTPA控制可以得到电流idr,2个电流经过电流闭环PI调节,得到udr、uqr电压,通过SVPWM调制,控制逆变器的开关时间,达到控制电机的目的。将采样得到的三相电流经过坐标变换得到id、iq,利用三相电压重构法得到电压ud、uq,这4个量通过MRAS算法可以估算到电机的运行速度和转子位置,用于速度闭环和坐标变换。
4 仿真分析
在Simulink搭建仿真模型验证提出的同步磁阻电机无位置传感器控制方法,对其进行仿真验证。由于Simulink中没有同步磁阻电机模型,本文搭建了同步磁阻电机模型,其中电感参数可用查表法得到,考虑电机饱和现象。
图6给出了电机全速度运行的转速(实际转速n和估算转速n^)和电流(实际电流id、iq)的变化。图中电机带轻载,经历起动到400 r/min再到800 r/min再到1 500 r/min,给定斜坡加速度为330 (r/min)/s,可以看出电机都能稳定运行。在起动时,出现小幅震荡,但能很快收敛。图7为1 500 r/min时电机实际转子位置和估算转子位置的仿真图。可以看出,实际电机转子位置和估算位置几乎重合。加速时电流变化小,因为仿真设置的转动惯量较小。由于是仿真,计算结果比较理想,转子位置误差和转速误差都几乎为0。图8为低速时的仿真曲线,可以看出样机可以运行在很低速(50 r/min)下。以上仿真结果均验证了本文所提无位置传感器控制方法的可行性。
5 实验验证
图9为实验系统,表1为实验电机参数,图4的有限元分析及第4节仿真研究均以该电机为对象。控制板控制变频器输出三相电压,控制同步磁阻电机(synchronous reluctance motor,SynRM)拖动永磁发电机(permanent magnet synchronous generator,PMSG),发出的电输送到电子负载。
5.1 宽速度范围运行
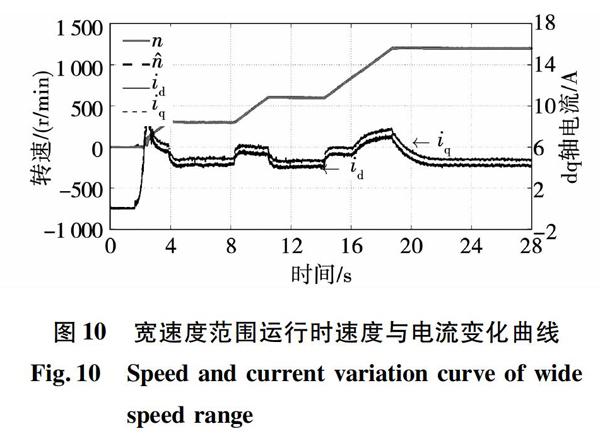
宽速度范围运行时速度与电流的变化曲线如图10所示,可以看出同步磁阻电机可工作在全速度范围。电机在2、8、14 s时分别以160 (r/min)/s的斜坡加速度开始加速到300、600、1 200 r/min,并稳定运行一段时间。在转速变化时,MRAS算法也可以使得转速和位置迅速收敛到真实值。与图6对比,可以看出实验和仿真结果大体一致。
从图10中可以看出电机在起动和加速中电流变化较大,从而引起电感参数变化较大。因此,采用分段PI 的方式,可以在一定程度上计及参数变化对电机的影响,通过不同的PI参数,降低了算法对电机参数变化的敏感度[17]。但是本文中已经考虑到电机交叉饱和等影响,采用查表法实现对电机电感Ld、Lq参数的实时更新,因此本文方法不采用分段PI控制也能得电机控制保持在稳定运行状态。
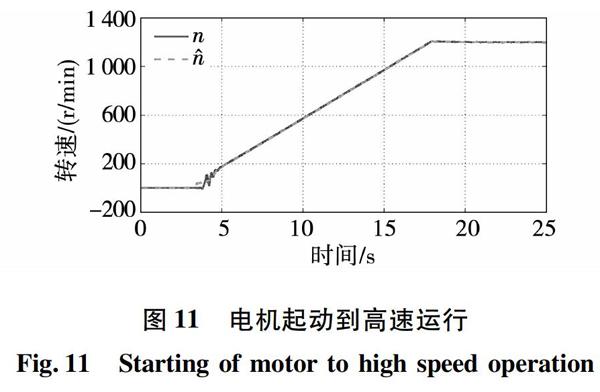
图11为电机从起动到高速运行的实际转速和估計转速曲线,电机在起动的时候,会经过1个转速震荡,这是因为MRAS算法有1个收敛过程,经过计算会使得估算转子位置收敛到电机转子实际位置,与前面仿真分析一致,只是仿真比较理想化,电流变化很小。
图12为电机运行于1 200 r/min转速下同时带1.5 kW负载时,电流、转速与转子位置瞬时波形。d-q轴电流也对应了最大转矩电流比设置的查表法关系。转子位置电角度误差在0.12 rad左右,转速误差在±3 r/min左右。该负载下电机工作在额定电流点附近。所以,该方法较好地实现了同步磁阻电机在高速带载情况下的控制。
5.2 转子不同初始位置下起动和低速下运行
电机在零速和较低速下反电势很小,不易检测,这是一般的基于反电势估算电机位置和转速的方法不能实现电机起动和较低速下运行的原因。
在电机起动时,MRAS算法会有一个从预想的转子位置到真实位置的收敛过程,会出现震荡,但是在电机1~2个电周期后,估算位置就会收敛到真实位置。转子在不同初始位置轻载起动的曲线如图13所示,可以看出该算法可以实现电机在转子任意初始位置下起动。这样就不用电机初始位置定位等较为复杂的算法实现电机起动。
图13 转子不同初始位置轻载起动
Fig.13 Startup at different initial positions with light load
图14(a)是电机空载起动到50 r/min的转速曲线,可以看出在MRAS算法下,电机空载起动相比较图13中带轻载起动转速震荡较小。实验结果表明本文所提无位置传感器算法适用于电机低速(约3%额定转速)运行。图14(b)是电机运行在50 r/min下转速误差与位置误差的曲线,可以看出电机转速误差较小,但是位置误差对比于高速运行时较大,达到0.16 rad左右。所以转速在低速运行效果可能并不是十分理想,因此更低速运行时性能变差。
5.3 与固定电感参数情况的实验对比
进行固定电感参数的对照试验,电机带载1.5 kW下运行在1 200 r/min时的转速和位置误差如图15所示,忽略鐵心饱和,即控制算法中电感参数固定为Ld=22.5 mH、Lq=5.2 mH。
表2为考虑与不考虑铁心饱和2种方法下的转子位置误差。不同转速带负载情况下,电机均工作在额定电流点附近。在不同电机负载和电机转速下,同步磁阻电机交叉饱和程度也不相同。可以看出,本文方法在同步交叉饱和程度下均可显著提高转子位置估计精度。同样可以看出,若不考虑铁心饱和,电机带载时转子位置误差比空载的时候小。这是因为带载时实际电感更加接近控制算法中所使用的固定电感值。
表3为在2种方法下的转速估算误差。不考虑铁心饱和采用电感参数时转速误差更大;同样,带载时转速误差比空载时较小。由此可见,本文所提的控制方法可以有效减小转子位置和转速的估计误差,有助于电机无位置传感器高性能运行。
工作状态转速误差Δn/(r/min)查表法Ld、Lq固定值Ld、Lq
40%nr空载-2.71~3.13-6.33~6.72
60%nr空载-2.95~3.34-6.74~7.06
40%nr负载1.0 kW-3.11~3.71-6.08~6.49
60%nr负载1.5 kW-3.16~3.67-5.98~6.31
6 结 论
针对同步磁阻电机铁心饱和(包括交直轴交叉饱和)严重的问题,本文提出通过有限元法计算不同工况下的绕组电感,然后用查表法获得电机的实时电感参数,在此基础上利用模型参考自适应方法实现同步磁阻电机无位置传感器控制。同时用实验验证了在不同交叉饱和程度下该方法比传统固定电感参数的方法有更小的转子位置误差和转速波动。该方法能够实现电机在任意转子初始位置起动,具有位置与转速的估算误差小,算法易收敛等优点,可以实现电机高性能运行。
参 考 文 献:
[1] VAGATI A. The synchronous reluctance solution: a new alternative in AC drives[C]// International Conference on Industrial Electronics, Control and Instrumentation,September 5-9, 1994, Bologna, Italy.1994:1-13.
[2] SHEN Jianxin, CAI Sun, SHAO Hang, et al. Evaluation of lowcost highperformance synchronous motors for ventilation application[C]// International Conference on Sustainable Mobility Applications, Renewables and Technology, November 23-25,2015,Kuwait, Kuwait.2015:1-6.
[3] MORANDIN M, FORNASIERO E, BIANCHI N, et al. A robust integrated starter/alternator drive adopting a synchronous reluctance machine for automotive applications[C]// IEEE Transportation Electrification Conference and Expo,August 31-September 3,2014,Beijing,China. 2014:1-6.
[4] 沈建新. 永磁无刷直流电动机特殊绕组结构及无位置传感器控制研究[D]. 杭州:浙江大学,1997.
[5] JOVANOVIC M G, BETZ R E, PLATT D. Sensorless vector controller for a synchronous reluctance motor[C]//IAS′96. Conference Record of the 1996 IEEE Industry Applications Conference ThirtyFirst IAS Annual Meeting,October 6-10,1996, San Diego, USA. 1996:122-129.
[6] ICHIKAWA S, TOMITA M, DOKI S, et al. Extended EMF models of synchronous reluctance motors and selection of main flux direction[J]. IEEJ Transactions on Sensors and Micromachines, 2003, 123(12):1507.
[7] MORIMOTO S, KAWAMOTO K, SANADA M, et al. Sensorless control strategy for salientpole PMSM based on extended EMF in rotating reference frame[J]. IEEE Transactions on Industry Applications, 2002, 38(4):1054.
[8] 黃雷,赵光宙,年珩.基于扩展反电势估算的内插式永磁同步电动机无位置传感器控制[J]. 中国电机工程学报,2007,27(9):59.
HUANG Lei, ZHAO Guangzhou, NIAN Heng. Sensorless control of interior permanent magnet synchronous motor by estimation of an extended electromotive force[J]. Proceedings of the Chinese Society for Electrical Engineering,2007,27(9):59.
[9] HILL W A, TURTON R A, DUNGAN R J, et al. A vectorcontrolled cycloconverter drive for an icebreaker[J]. IEEE Transactions on Industry Applications, 1987, 23(6):1036.
[10] TAJIMA H ,HORI Y . Speed sensorless field orientation control of the induction machine[J]. IEEE Transactions on Industry Applications, 1993, 29(1):175.
[11] LAGERQUIST R .Sensorless control of synchronous reluctance motor[J]. IEEE Transactions on Industrial Applications, 1994, 30(3):673.
[12] LVARO O, CAVALEIRO D, BRANCO R, et al. An encoderless highperformance synchronous reluctance motor drive[C]// IEEE International Conference on Industrial Technology,March 17-19,2015,Seville, Spain.2015:2048-2055.
[13] CARDENAS R, PENA R, PROBOSTE J, et al. MRAS observer for sensorless control of standalone doubly fed induction generators[J]. IEEE Transactions on Energy Conversion, 2006, 20(4):710.
[14] ZAKY M, KHATER M, YASIN H, et al. Review of different speed estimation schemes for sensorless induction motor drives[J]. JEE, 2008, 8(2):102.
[15] 李永東, 朱昊. 永磁同步电机无速度传感器控制综述[J]. 电气传动, 2009, 39(9):3.
LI Yongdong, ZHU Hao. Overview ofsensorless control of permanent magnet synchronous motors[J]. Electric Drive, 2009, 39(9):3.
[16] 梁艳, 李永东. 无位置传感器永磁同步电机矢量控制系统概述[J]. 电气传动, 2003, 33(4):4.
LIANG Yan,LI Yongdong. The state of art of sensorless vector control of PMSM[J]. Electric Drive,2003, 33(4):4.
[17] 钟臻峰, 金孟加, 沈建新. 基于分段PI调节器的模型参考自适应永磁同步电动机全转速范围无位置传感器控制[J]. 中国电机工程学报, 2018,38(4):1203.
ZHONG Zhenfeng, JIN Mengjia, SHEN Jianxin. Full speed range sensorless control of permanent magnet synchronous motor with phased PI regulatorbased model reference adaptive system[J]. Proceedings of the Chinese Society for Electrical Engineering, 2018,38(4):1203.
[18] GUGLIELMI P, PASTORELLI M, VAGATI A. Impact of crosssaturation in sensorless control of transverselaminated synchronous reluctance motors[J]. IEEE Transactions on Industrial Electronics, 2006, 53(2):429.
[19] 王成元.电机现代控制技术[M].北京:机械工业出版社, 2006.
(编辑:邱赫男)