
双电机驱动同步控制系统的研究进展与关键技术
2019-01-30 08:58
应用能源技术 2019年1期
(武汉科技大学,武汉 430081)
0 引 言
伺服电机已广泛应用于机械制造的众多领域,当系统提出大功率需求时,因为单个电机的功率有限,往往需要采用双电机共同驱动来满足。由于标称参数相同的电机不一定具有相 同的实际参数,对于相同的输入指令,两电机实际运动情况可能不同[1],因此电机的同步精度成为了影响产品质量的关键所在。针对上述问题,国内外学者相继提出了同步控制的结构和算法。经过多年发展,已逐渐形成一套较为完备的双电机同步控制理论。
1 双电机同步控制结构
同步在狭义上指两电机的位置、速度和加速度等完全相同,即完全同步。广义则指位置、速度和加速度等保持一定的比例关系,即比例同步[2]。目前,实现双电机同步控制的结构主要有两种:机械同步结构和电子同步结构。机械同步结构使用一个主电机带动总轴,其他电机轴和总轴通过机械传动结构相连。当其中一个轴受到扰动时,主电机会收到反馈并作出相应变化。由于机械结构较复杂,容易发生磨损,因此加工精度易受影响。当输出参数化需要调整时要拆换传动装置,改变原有耦合关系,增加了生产成本[3]。因此,在双电机同步控制中,应用更为广泛的是电子同步结构。常见的电控结构有四种:并行控制,主从控制、虚拟主轴控制和交叉耦合控制。
1.1 并行控制
并行控制是一种非耦合控制,结构框图1如所示。采用并行结构时,系统相当于开环控制,如果其中一个电机受到外部扰动,则会产生不同步现象,无法满足高精度加工要求。

图1 并行控制结构图
1.2 主从控制
主从控制将某一轴作为主轴,另一轴作为从轴。由图2可以看出,从轴的速度能够跟随主轴变化,但主轴却无法接收从轴反馈的信号。由于从电机存在跟踪滞后现象[4],主从控制只适用于同步精度不高的加工过程。

图2 主从控制结构示意图
1.3 虚拟主轴控制
虚拟主轴的概念由Lorenz和Meyer于1999年正式提出[5]。该结构使用虚拟主轴代替机械主轴,克服了机械主轴的缺点,但在负载停机、启动和突然发生变化时,容易产生同步误差[6]。

图3 虚拟主轴控制结构示意图
1.4 交叉耦合控制
Koren于1980年提出了交叉耦合同步控制结构[7],它是在并行控制的基础上,加入一个补偿单元,将两轴速度差或位置差作为共享反馈信号。由于综合考虑了两轴的运动情况,同步性能大大提高。

图4 交叉耦合结构示意图
2 双电机同步控制算法
对于双电机驱动系统同步控制的策略,国内外学者主要提出了差电流负反馈控制和差速负反馈控制。差电流负反馈由日本FANUC株式会社提出,它在并行同步机构的基础上,将两伺服电机的实际电流或转矩指令的差分结果乘以一个变换系数,作为位置偏移量叠加到转矩滞后轴的位置指令中[8]。由于两电机的实际参数可能不同,因此电流一致不能保证两轴速度也一致。对此,陈庆伟等提出了差速负反馈控制策略。该策略保留主电机速度环,断开从电机速度环,将差速信号反馈至电流端,借助电流环的快速响应来抑制两轴速度同步误差[1]。
传统的PID控制能够提高单轴的跟踪能力,有效改善系统的同步性能,但是当同步偏差较大时易出现超调和反应滞后的现象,难以满足高精度加工的要求[8]。其他控制算法主要有自适应控制[9]、前馈控制、模糊控制、神经网络控制和滑模变控制等。在传统控制理论的基础上,产生了模糊PID控制、模糊滑模变补偿算法、基于广义预测的控制理论等补偿方法。经过理论分析和系统仿真,这些补偿方法能够显著提高电机的同步精度和性能。其中,积分分离的PID控制算法已应用于动梁式龙门数控机床[10],其他部分方法也已成功应用于实践。
3 新型双电机驱动同步控制系统设计
基于以上研究,现有的双电机同步控制系统大多仅将电机位置或速度作为负反馈信号来建立单闭环结构,但是两电机位置或速度的一致性不能保证负载速度的一致性。针对上述缺陷,文中提出了一种双闭环同步控制系统。
系统硬件采用带有旋转编码器的交流伺服电机,电机绕组与驱动器的输出端连接,电机编码器与驱动器的编码器输入接口连接。驱动器的CAN通讯接口与计算机的CAN卡连接;负载编码器信号输出与转换器连接,转换器输出标准RS232与计算机相连。

图5 新型同步系统硬件设计
系统采用交叉耦合同步结构,其中一环将电机的输出信号反馈至驱动器,另一环将负载传感器的采集信号反馈至计算机。各轴电机与负载之间构成跟踪偏差,两轴输出信号之间构成同步偏差,如图6所示。补偿方法采用模糊PID控制,信号分析与处理均在计算机内完成。
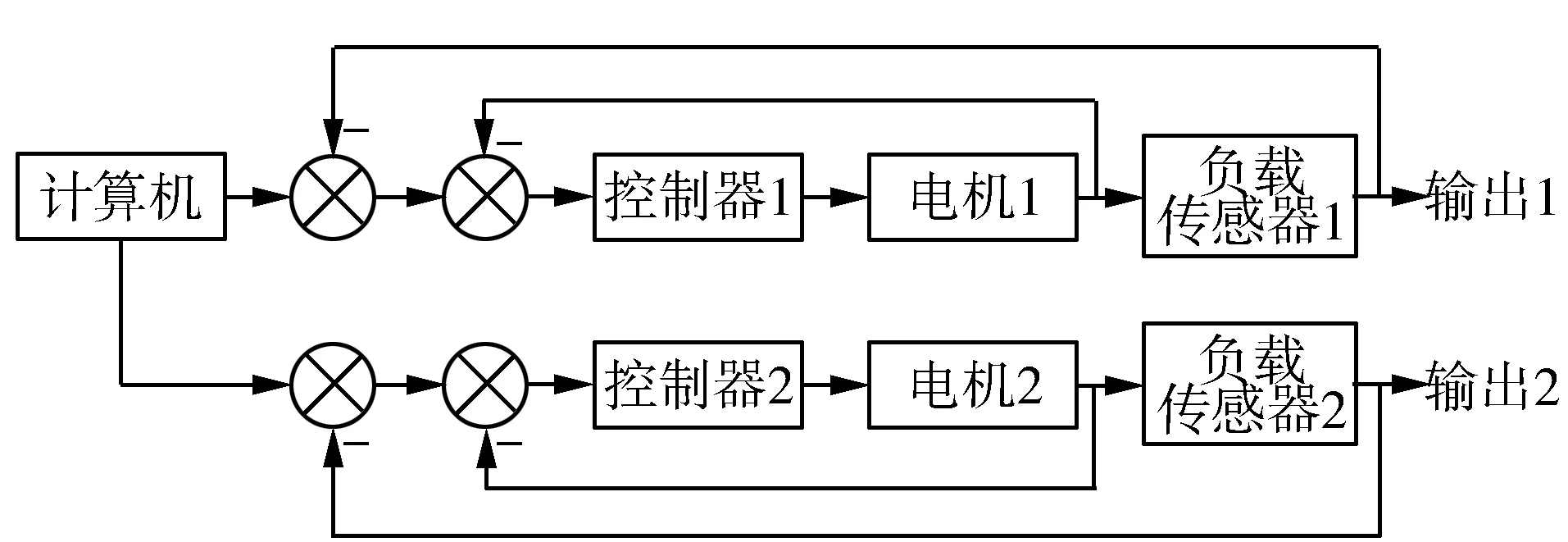
图6 基于交叉耦合的双闭环同步控制系统
4 结束语
双电机同步控制系统已广泛应用于精密加工、纺织印染、生产输送等各个领域,拥有广阔的发展前景。国内外对同步控制结构和同步控制理论的研究逐步深入,成为指导生产实践的有效方法。文中总结了现有控制方法的概念、原理和优缺点,提出了一种基于交叉耦合的双闭环同步控制系统。
猜你喜欢
四川大学学报(自然科学版)(2021年1期)2021-01-26
电子制作(2019年23期)2019-02-23
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年2期)2017-05-04
现代计算机(2017年4期)2017-03-29
上海海事大学学报(2016年3期)2016-12-19
自动化学报(2016年5期)2016-04-16
探测与控制学报(2015年4期)2015-12-15
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
