
基于风电功率概率预测的无功优化方法研究
2019-02-19 05:28杜鹏程
山东电力技术 2019年1期
雷 鸣,杜鹏程
(1.国网山东省电力公司检修公司,山东 济南 250118;2.山东电力调度控制中心,山东 济南 250001)
0 引言
电力系统无功优化问题是一个多目标、多变量、多约束的混合非线性问题,主要涉及无功补偿装置投切时间、投入地点、投入容量的计算,以及变压器分接头和发电机机端电压的确定[1]。传统无功优化方法一般以当前状态断面为基础,以网损最小为目标,按照优化周期滚动得出控制变量调控值。近年来,风电并网规模和比例不断增加,而传统无功优化方法未考虑风电出力的随机性和波动性等特点,无法保证整个优化周期内良好的优化效果。因此,迫切需要研究考虑风电特性的无功优化方法,以实现更好的无功调控目标。
针对风电并网比例升高后系统运行状态随机性、波动性增加[2-3],导致优化周期初始断面所得优化措施不能保证整个周期内网损最小,提出一种基于风电功率概率预测的无功优化方法,构建了考虑风电功率概率预测的无功优化数学模型,采用粒子群算法对模型进行求解,以有效改善无功优化效果。
1 基于Markov链的风电功率概率预测方法
1.1 Markov链定义
设有一个随机过程{Xn,n∈I},其参数集 I是离散的时间集合,即 I={0,1,2,…},相应的 Xn取值为离散的状态空间 T={0,1,2,…,n+1}。对任意时间值 n∈I和相对应状态 T0,T1,T2, …,Tn+1∈T 条件概率满足

则称{Xn,n∈I}为 Markov 链[4]。
1.2 状态空间的划分过程
1)状态空间数划分。
通过分析风电功率的历史数据,发现风电机组功率数据没有明显的规律性且波动较大,传统的状态空间划分方法如有序聚类法、样本均值—均方差分级法等均不适用。通过比较不同状态数对结果产生的影响,将状态空间划分为28个,来提高预测结果的准确度[4]。
2)确定状态变量。
在风电功率概率预测的过程中,状态变量是离散的,被定义为有限的集合{S1,S2,…,SN},N 为状态空间数。在时间间隔[th-1,th]产生的风电功率平均值为状态变量 X(th),h 为时间间隔点,h={1,2,3,…}。
在定义状态变量时,应考虑风电机组输出功率为0或额定功率PK的情况,并可以由此确定上下限,即S1和SN分别取值为0和PK。剩余的状态变量取值范围为[0,PK],被均分为 N-2 份。
1.3 转移概率的定义
Markov 链{Xn,n∈I}在时刻 n 的一步转移概率为

式中:α,β∈T。
Markov链齐次的要求是对任意的 α,β∈T,Markov链{Xn,n∈I}的转移概率P(n)αβ与n无关。而在应用上,主要研究齐次Markov链。齐次的Markov链{Xn,n∈I}完全由其初始分布及其状态转移概率矩阵所构成的矩阵决定。
1.4 Markov链预测步骤
1)对风电功率的历史数据分组,生成分级标准,确定Markov链的状态空间;
2)按上述分级标准,确定各时段风电功率所处的状态;
3)根据步骤2)确定的各时段状态,得到Markov链的转移概率矩阵,即为对风电功率状态的转移过程进行预测的概率法则;
4)以前一时段的风电功率为初始状态,结合状态转移概率矩阵即可预测出该时刻风电功率的状态概率分布。
2 考虑风电功率概率预测的无功优化模型
无功优化通常采用调整发电机机端电压、投切无功补偿装置和调节变压器分接头等措施,在保证电压质量的前提下减小网损。
1)目标函数。

其中,

设取得风电功率概率预测结果后,风电出力总共有N种状态,对应状态k的概率为pk,风电出力状态k对应系统运行状态断面网损表示为flossk,则目标函数为式中:NL为输电线路集合;gij为节点i和节点j之间线路的电导;θij为节点i和节点j之间的电压相角差;Uik,Ujk和θijk分别为运行状态断面k中节点i电压幅值、节点j电压幅值及节点i,k之间的相角差。
2)约束条件。
各运行状态断面下还需满足以下不等式约束条件

式中:Ui为节点i的电压幅值;Umaxi,Umini分别为节点电i压幅值上、下限;NPQ为网络中PQ节点集合。
3 基于粒子群算法的无功优化方法
粒子群算法从群体出发,在整个解空间同时寻优,理论上可以找到全局最优解。具有计算简单快速,输入参数少的优势,在无功优化领域广泛应用[5]。
粒子群算法由群鸟觅食演变而来,基本思想是模拟鸟群随机搜寻食物的捕食行为,鸟群通过自身经验和种群之间的交流调整自己的搜寻路径,从而找到食物最多的地点[6]。
在群鸟觅食模型中,鸟群被看成粒子群,而每个个体被看成一个粒子。设在一个D维的目标搜索空间中,有m个粒子组成一个群体,其中第λ个粒子λ=(1,2,3,…,m)位置表示为Xλ=[X1λ,X2λ,X3λ,…,XDλ],即第λ个粒子在D维搜索空间位置是Xλ。将Xλ带入目标函数可以得到适应值,然后根据适应值的大小来判断其优劣。粒子个体经历过的最好位置为Pλ=[p1λ,p2λ,…,pDλ];在群体里,所有粒子经历过的最好位置为 Pg=[p1g,p2g,p3g,…,pDg]。对任一粒子 λ,其速度为Vλ=[v1λ,v2λ,v3λ,…,vDλ][7]。
粒子群算法中要对粒子的位置不断地更新,第t次迭代的过程中,每个粒子根据以下公式更新自己的速度和位置:


式中:i=1,2,…,B,B 为粒子群规模;d=1,2,…,D,D为搜索空间维数;t为迭代次数;xλ,d(t)为第 t次迭代粒子 λ 位置矢量的第 d 维分量;vλ,d(t)为第 t次迭代粒子 λ 速度矢量的第 d 维分量;xp,d(t)为第 t次迭代粒子 λ 个体最好位置的第 d 维分量;xg,d(t)为第 t次迭代粒子群最好位置的第d维分量;Rrand1,Rrand2为[0,1] 区间内变化的随机数;w 为惯性权重;c1,c2为加速系数。
具体求解流程如下:
1)粒子的构造及搜索空间。
在PSO算法中,粒子在搜索空间的位置对应无功优化的控制变量,为发电机机端电压VG。
2)粒子群的初始化。
粒子群的初始化即对控制变量随机产生一个初始适应值群。产生方法为

式中:Rrand为[0,1]区间内的随机数;xλ,d为第 λ 个粒子在d维上的控制变量;xmaxλ,d和xminλ,d分别为xλ,d上、下限。
3)约束条件的处理。
无功优化模型中的约束条件可以转化为罚函数,与原有目标函数一起作为扩展的目标函数,见式(7)。
4)目标函数的处理。
目标函数为网损、罚函数之和与风电的概率分布所求得的期望值:

式中:η为惩罚因子;ΔVik为概率为pk的状态断面下节点i电压越界值,其计算公式为

式中:Vikmax,Vikmin分别为概率为pk的状态断面下节点i电压上、下限。
5)潮流计算。
通过潮流计算,得到目标函数值并检验约束条件是否满足。通过式(6)与(7),完成粒子速度和位置的更新。
6)收敛判据。
采用目标函数值相邻两次迭代偏差小于10-5作为收敛判据。
4 仿真算例
仿真采用三机九节点系统,系统结构如图1所示。

图1 三机九节点系统结构
与其他计算软件相比,PSAT有支持可视化建模、可以进行命令行调用以及内在结构开放等优点。因此,选择PSAT作为潮流计算工具。在PSAT中搭建三机九节点系统,如图2所示。

图2 PSAT搭建的三机九节点系统结构
将节点6加入风场,通过优化PV节点2和3的电压实现无功优化。在仿真算例中,粒子群算法的参数设置如下:粒子群规模B=5,个体和社会学习因子c1=c2=2,惯性因子w=0.6,粒子的最大飞翔速度vmax=0.1,最大迭代次数Mmaxnum=15。
风电场出力采用某实际风场数据进行预测和验证。假设负荷保持不变,风电功率每分钟更新一次,无功优化周期为10 min,累计仿真计算10个无功优化周期,通过计算累计100个状态断面的网损,比较基于风电功率概率预测的电压无功优化方法和传统无功优化方法的效果。传统的无功优化只根据周期初始断面进行无功优化,所得调控量在整个10 min周期内保持不变。基于风电功率概率预测的无功优化则是根据优化周期初始状态断面、当前时刻风电功率和10 min后的概率预测,获得不同概率的预测状态断面,通过网损期望最小获得调控量,该调控量值在调控周期内同样保持不变。最终的仿真结果如表1所示。
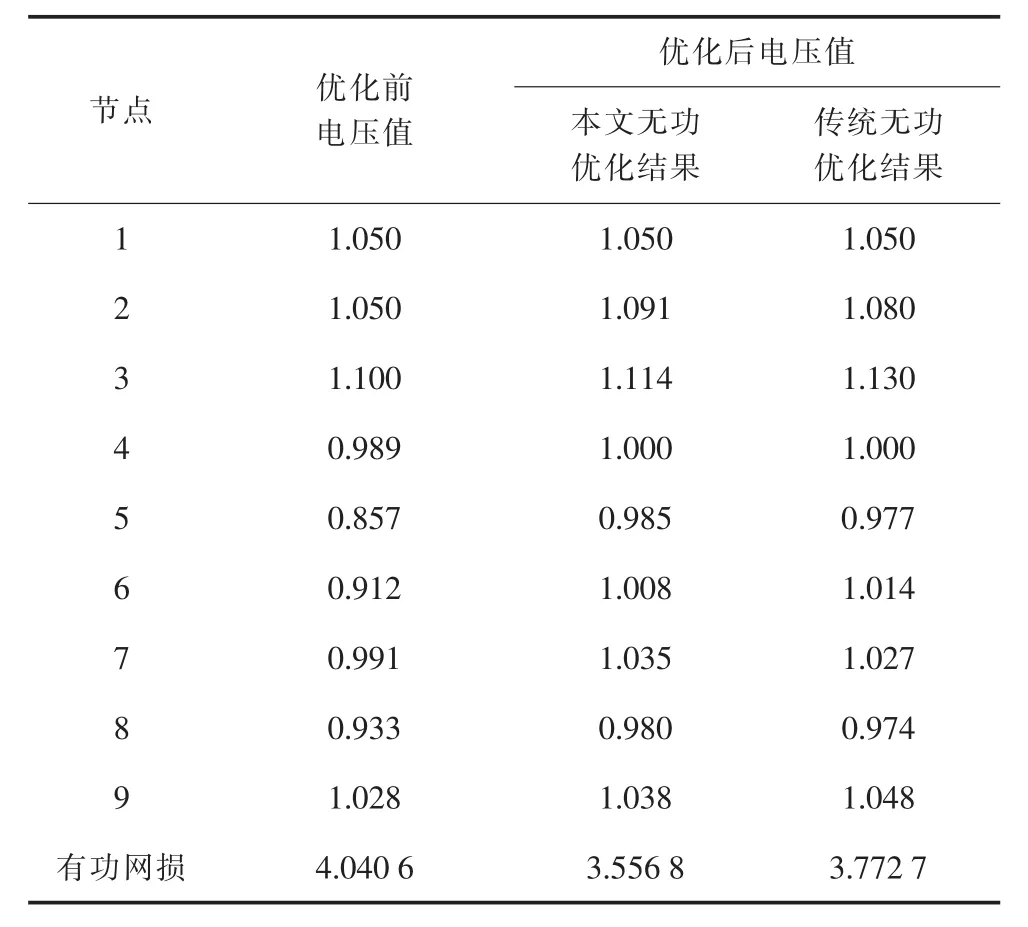
表1 基于风电功率概率预测和传统无功优化方法的优化效果对比 pu
仿真结果可以看出基于风电功率概率预测的无功优化方法求得的总网损小于传统无功优化方法求得的网损,可以直观地得出前者的优化效果更好。
5 结语
基于风电功率概率预测的无功优化方法,克服了传统无功优化方法在高比例风电情况下优化效果不足的问题,仿真结果表明该方法简单可行,效果良好。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
韩国语教学与研究(2022年3期)2022-02-08
新疆钢铁(2021年1期)2021-10-14
中学生数理化·中考版(2020年12期)2021-01-18
中学生数理化·中考版(2020年12期)2021-01-18
中学生数理化·中考版(2018年12期)2019-01-31
能源(2018年6期)2018-08-01
能源(2018年6期)2018-08-01
能源(2018年8期)2018-01-15
风能(2016年12期)2016-02-25
