
广东省果园智能除草装备现状与展望
2019-04-01 08:24李君略李沐桐
现代农业装备 2019年1期
甘 玲,李君略,2,何 林,李沐桐※
(1.广东省现代农业装备研究所,广州 510630;2.广东弘科农业机械研究开发有限公司,广州 510630)
0 引言
广东省果园种植面积有96.05万hm2,省内各地分布如图1所示,其中广州、梅州、肇庆、湛江、茂名等地的总种植面积约占全省的55.3%,多为丘陵山区,种植主要以柑桔橙、香(大)蕉、荔枝和龙眼为主[1]。在果园生产关键环节中,除草作业是决定果园产量、果品质量的重要因素。目前果园的除草方式主要以人工作业为主,且传统药剂大面积喷除方式会带来严重的污染与残留问题,对于果树种植密度大,分散性大,地形多变等特点而言,人工作业不仅难度大、安全性低且劳动强度高[2,3]。近年来,通过政策促进与鼓励措施,农业机械化水平有所提高,但农机化作业基础依旧薄弱、针对性适配装备短缺、智能化技术程度较低。因此,探索智能化除草机器人作业模式已成为广东省农业可持续发展的迫切需要。
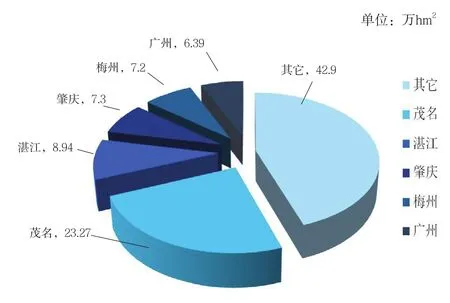
图1 2018年广东省果园种植面积分布概况
1 果园机械化除草现状
根据对广东省果园生产环节管理情况的实地调查发现,其生长环境地形多变,作物多样化种植,植株矮密且分散性大,传统大田除草机具底盘在这种地形上作业,行走通过性很差[4]。因此,在地貌特征与种植特点的约束下,大多数标准农用机具无法正常运行,其作业难度大、行走通过性低、稳定性差等问题也是多年来制约丘陵山区农业机械化发展的瓶颈因素。
近年来,为保证丘陵山区果园除草作业的灵活性和质量,国内外涌现了一些小型特色机型,如KASS企业生产的UPH270型手持式多功能割草机,如图2所示,其结构简单,操作灵活,但作业效率低,仅为0.04 hm2/人·d;山东潍坊森海机械制造有限公司研制的森海3GT-80除草机,如图3所示,割幅为800 mm,有效地提高了作业效率,并具有轻质低能耗的特点,但其割茬高度仅为100~300 mm,且采用地轮方式行走,不能较好地适用于坡地、坑沟环境,在实地作业中依然不能清除较高的灌木与杂草。2018年,广东省现代农业装备研究所研制的GC550/800型手扶自走式割草机,如图4所示,该机型采用小型履带行走方式,甩刀式打草方式(550/800 mm),有效地提高了作业效率和质量,且适合丘陵山区果园作业,操作员按每天工作6 h计算,一天可完成约2.7 hm2;日本ATEX公司研制的R-805AB型乘坐式自走割草机,如图5所示,可减轻劳动力,但其轮式行走方式受地形限制,在大坡度环境下的通过性较差,不能完全适应丘陵山区的果园作业。
2 机械化作业存在的关键问题
2.1 过沟越障能力不足

图2 小型手持背负式割草机

图3 3GT-80型除草机

图4 手扶自走割草机(GC550)

图5 乘坐式自走割草机(R-805AB)
在丘陵山区果园作业中,其地形地貌复杂多样,凸凹不平,农机具行走稳定性和通过性较差,易产生倾翻等现象,存在安全隐患[5,6]。其主要原因是由于在突起障碍、坡沟状况行走过程中的阻力会发生持续大幅度突变,导致因动力不足发生“打滑、卡死”等状态,或因机体失衡发生侧翻等现象,目前配套的底盘自动调平和农机具自适应调节技术比较落后,在平衡控制与行走仿形功能方面仍需针对性研究,混合动力的应用也较少。
2.2 远程控制技术落后
在作业过程中,考虑到人工作业的难度与危险性,无人作业或远程遥控作业已成为主要发展方向,而自主导航、路径规划等自动行驶技术是突破此问题的关键,由于丘陵山区地理信息不稳定,采集关键数据的准确度低、难度大,目前采用的方法是高成本构建环境地图,通过地图反馈实现部分区域的导航控制,这也是多年来阻碍丘陵山区智能农机发展的关键问题。
2.3 复杂目标识别定位研究薄弱
广东省果园环境具有多样化、低矮密植、作物娇嫩等特点,且顽固岩体无规则分布,植被堆积较多,灌木、杂草分散量大,作业环境恶劣,在除草环节中,硬性障碍物与机具关键执行部件常出现撞击、摩擦现象,造成机具频繁受损、失灵等问题[7]。当前国内外对于果树、杂草、障碍物等辨识定位技术有较多的基础性研究,但应用在大田、株间除草居多,针对丘陵山区果园复杂环境的研究还是空白。
3 对策与建议
3.1 加强政策支持
近年来,丘陵山区农业机械化已成为广东省的重点发展领域之一,自2015年农业农村部出台了《到 2020 年农药使用量零增长行动方案》后,2018年10月,广东省科技厅先后发布了《广东省重点领域研发计划2018—2019 年度 “智能机器人和装备制造”重大科技专项申报指南》和《广东省重点领域研发计划2018—2019年度“智能农机装备”重点专项申报指南》,全面针对丘陵山地机械化、国产装备可靠性和适应性差等问题,支持关键技术攻关和装备研制;同年12月,广东省农业农村厅发布了《2019年省级乡村振兴战略专项资金第二批(省级项目)入库申报指南》,在丘陵山区农机装备产业化能力提升专项中,对广东省丘陵山区林果业机械化的发展给与了充分支持。在此前提下,除草作为丘陵山区耕、种、收、运等农业生产的关键环节,做好智能除草装备的研制与推广,是奠定广东省特色农机发展的重要基础,在政策与支持方向上,还需细化机具类型,明确具体功能机型,以便提供有效技术支持与产能供给。
3.2 提升可靠性研究
基于丘陵山区地貌特征,搭建坡度调节试验设施,对行走底盘、执行部件、动力输出装置及传动结构进行可靠性试验研究,保证在作业过程中的灵活性与稳定性;针对坡度变化不确定、坑沟、顽固障碍物随机分布等环境条件,改进关键除草部件刀型、排列方式等设计,优化刀具数量、刀辊转速等工作参数,在降低能耗、高效作业的基础上,最大程度保护核心装置。
3.3 开发智能化技术
由于丘陵山区作业环境复杂、条件恶劣,半自动(手持式、乘坐式)除草机不能有效保障操作人员的安全性,采用智能化控制技术可以有效解决此问题,包括果园环境大数据采集与知识库的建立(土壤质地、地形形状、枝干、杂草与灌木的纹理和颜色特征等)、复杂目标快速识别、远程实时交互平台开发、抗干扰技术搭载、混合动力控制、自动驾驶与全程导航监测技术、机器视觉与路况感知技术及自适应调控技术等[8,9]。智能化的研发是需要不断地改进、纠正和完善的,发展进程可按如下技术成熟度逐步实现:人员遥控作业、远程交互作业、自动巡航智能监测作业[10,11],每一步对丘陵山区智能农机的发展都有着重要的意义[12]。目前,主要以遥控作业为主要研制方向,技术成果可作为未来智能化可持续研究基础和参考依据。
3.4 强化集成性能
总体技术集成是智能除草装备研制成功的最关键环节,涉及多种感应装置、控制元件、调节模块、监测设备与多自由度的复杂机械结构相连接,若其中某个环节出现问题,可能造成整机无法正常使用[13,14]。在作业性能方面,部件的标准化、模块化要统一分类与规定,以逐步完善丘陵山地果园除草装备的作业效率和性能。
4 结语
广东省丘陵山区除草智能机械化是发展丘陵山区特色农机装备的首要目标,也是重要的一步,目前机械化装备未形成有效供给,智能控制技术还不能成熟应用,因此,需要全力突破重大前沿技术,提升广东省特色农机装备智能化水平,针对性攻克核心零部件技术与制造工艺,是加速广东省丘陵山区农机装备升级发展的重点。本文结合广东省丘陵山区果园的实际情况,针对除草环节,对目前丘陵山区果园农机化装备现状进行总结和阐述,根据具体作业方式,对智能化农机进行初步分析与讨论,并提出对策与建议,以加快提升广东省丘陵山区果园智能除草装备水平。
猜你喜欢
今日农业(2022年15期)2022-09-20
趣味(作文与阅读)(2022年3期)2022-06-10
今日农业(2021年21期)2021-11-26
今日农业(2020年18期)2020-12-14
当代陕西(2020年17期)2020-10-28
艺术品鉴(2019年12期)2020-01-18
小太阳画报(2018年7期)2018-05-14
农家科技下旬刊(2017年7期)2017-08-22
散文诗(2017年22期)2017-06-09
中国农业文摘-农业工程(2016年5期)2016-04-12
