
基于机器视觉的育秧盘裂缝缺陷检测方法研究
2019-04-01 08:24袁志成王宇唯季传栋温志成邓向武
现代农业装备 2019年1期
马 旭,袁志成,王宇唯,季传栋,温志成,邓向武
(华南农业大学 工程学院,广州 510642)
0 引言
水稻是我国主要粮食作物之一,水稻生产机械化是水稻生产发展的主要方向,提高水稻生产全程机械化水平是保障国家粮食安全、增强农业综合生产能力、增加农业收入和推进农业现代化的重要举措之一[1-3]。长期以来,水稻种植机械化是我国水稻生产机械化的薄弱环节[4-6],水稻机械化种植方式主要有移栽和直播[7-11],其中机移栽的主要环节是育秧,本文主要从育秧的角度来研究育秧机上的育秧盘。随着水稻工厂化育秧技术日趋成熟,育秧盘是水稻育秧的载体,更是播种育秧生产线不可缺少的一部分,但因育秧盘长期使用或运输不当易出现破损,所以严重地影响高效自动化精密播种育秧生产线在自动供盘与叠盘的成功率[12]。为了减少误操作,目前主要采用人工挑选育秧盘作业,但由于选择标准差异大、工作强度高,误判多,因而严重地影响了育秧质量,以及育秧生产线的生产效率。育秧盘破损的主要形式有断裂和翘曲,其中以断裂为主,而断裂主要由裂缝产生,如果裂缝过大,会使种子和土外洒,影响自动供盘与叠盘作业。因此,进行育秧盘裂缝缺陷的分析研究,及时发现破损的育秧盘,并对其进行动态、实时监控,对工厂化自动育秧生产线的应用具有重要的意义。
目前,裂缝缺陷的检测方法主要包括射线检测、超声波检测及漏磁检测等[13]。近年来,国内外许多学者将机器视觉技术运用到物体表面缺陷检测中,并取得了一定的成效。徐欢等[14]在路面裂缝检测中,利用CCD摄像机采集视频图像,提出一种基于OpenCV开源平台及改进canny算子的路面裂缝检测技术,通过对canny算子的分析与研究,找到其存在的缺陷,利用形态学滤波对原有的滤波方式进行改进,使用ostu算法实现双阈值的自适应获取。许志文等[15]利用中值滤波,基于二维类间方差多门限分割等算法,实时自动检测出工业自动化生产线过程中的常见布匹破损,能够显示出布匹破损的位置、面积等信息,并能对破损图像数据存储管理,同时发出报警信息。A.Cubero-Fernandez等[16]通过对大量道路的裂缝图片进行对数变换、双边滤波、canny边缘检测和形态学滤波等预处理,然后再应用分类决策树算法对图像进行分类,使得公路维护设备能够更好更快更准确地对公路进行维护和修补。Pejman Mehran等[17]利用机器视觉自动检测方法,快速准确地检测了浇铸成形水管机械加工表面的破损边缘,具体采用模糊C均值聚类算法,提出了一种模糊破损边缘检测模型,能够对水管表面破损边缘进行分类。可以看出,机器视觉检测技术是一种成本低、非接触、抗干扰能力强及高效率的检测方法,具有良好的可行性。
本研究以育秧盘裂缝缺陷为研究对象,结合灰度化处理、自适应阈值处理、形态学运算、中值滤波和最小外接矩形等方法,对育秧盘的裂缝进行处理并标记出来,为育秧盘裂缝的检测和判定奠定基础。
1 实验平台搭建与图像采集
实验在华南农业大学工程学院国家水稻产业技术体系设施与设备教研室进行,实验平台如图1所示。育秧盘的尺寸为600 mm×300 mm×30 mm,在光箱内利用罗技C270高清摄像头采集育秧盘的裂缝图像。试验采集了育秧盘裂缝缺陷图像信息,且成像清晰。计算机硬件配置为:Intel(R)Core(TM)i7-4790 CPU @ 3.6 GHz,4.00 GB 内,Intel(R)HD Graphics 4600显卡。计算机软件环境为功能强大的图像处理软件Visual Studio 2013,结合OpenCV开源跨平台视觉库,使得图像处理开发变得更加方便、快捷。
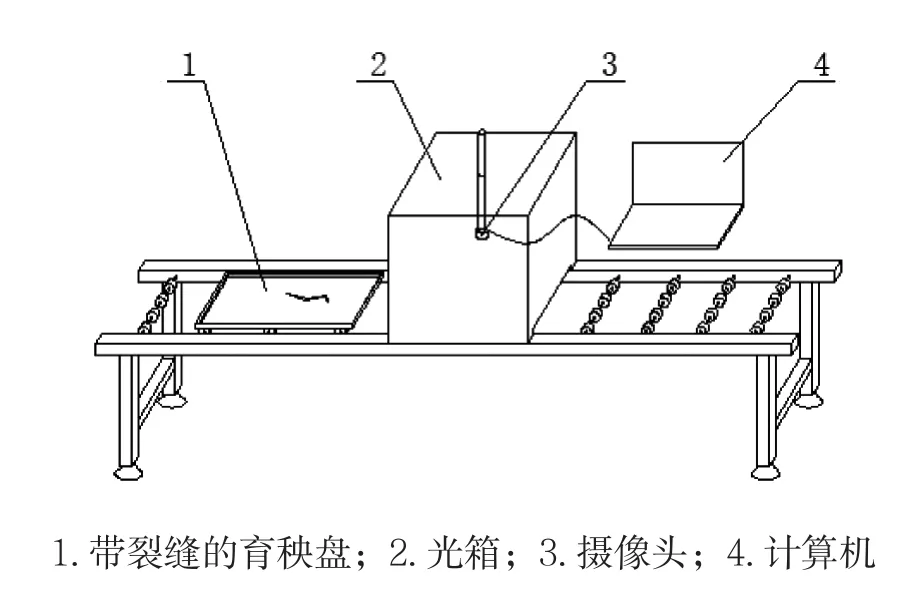
图1 实验平台示意图Fig.1 The schematic diagram of experimental platform
2 育秧盘裂缝检测方法
2.1 图像灰度化
彩色图像的灰度化就是使彩色图像的R、G、B分量值相等的过程。图像灰度化的方法有如下几种:
1)最大值法:使灰度值等于原始图像像素R、G、B三个值中最大的一个,即

2)平均值法:使灰度值等于原始图像像素R、G、B的均值,即

3)加权平均值法:根据重要性或其他指标给R、G、B赋予不同的权值,并使灰度值等于原始图像像素R、G、B值得加权平均,即

式中 Q1、Q2、Q3分别为R、G、B的权值,取不同的Q1、Q2、Q3,将形成不同的灰度图像。
本实验选取的是平均值法,灰度化结果如图2所示:
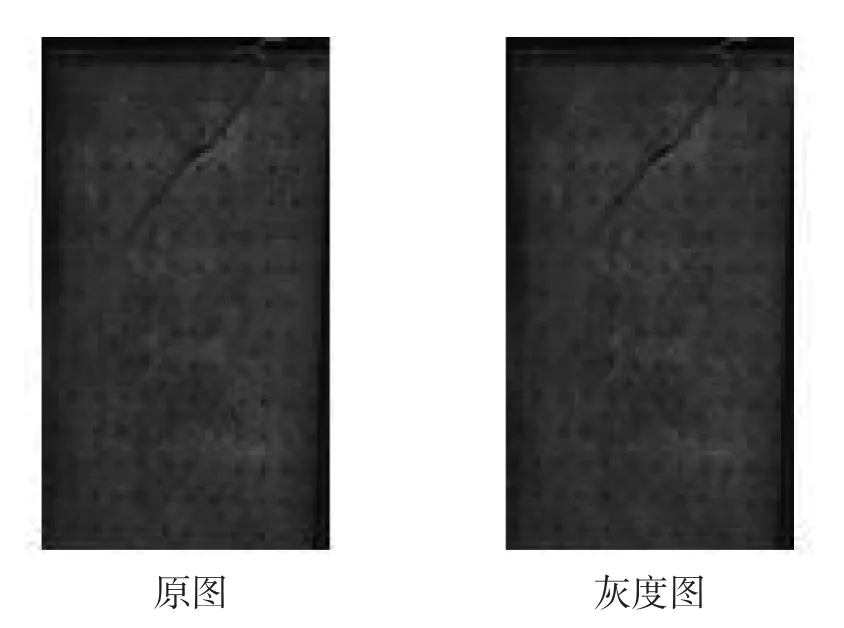
图2 灰度化结果Fig.2 The gray image of defective seedling tray
2.2 自适应阈值处理
在对各种图形进行处理操作的过程中,常常需要对图像中的像素做出取舍与决策,直接剔除一些低于或者高于一定值的像素。
阈值可以被视作最简单的图像分割方法。比如,从一幅图像中利用阈值分割出我们需要的物体部分(当然这里的物体可以是一部分或者整体)。这样的图像分割方法基于图像中物体与背景之间的灰度差异,而且此分割属于像素级的分割。为了从一幅图像中提取出我们需要的部分,应该用图像中的每一个像素点的灰度值与选取的阈值进行比较,并作出相应的判断。但阈值的选取依赖于具体的问题,即物体在不同的图像中有可能会有不同的灰度值。
根据每个育秧盘不同的裂缝信息,需要用到自适应阈值处理。由图3可知,在通过自适应阈值处理之后,得到育秧盘裂缝的基本信息。
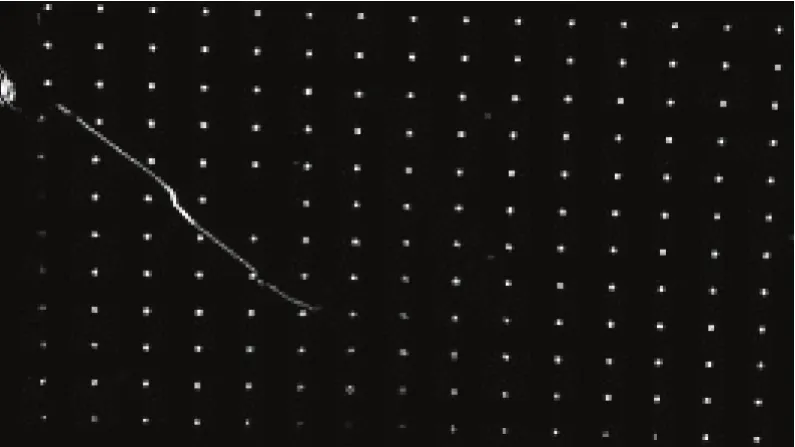
图3 自适应阈值处理Fig.3 The result of adaptive threshold
2.3 形态学处理
形态学一词通常表示生物学的一个分支,该分支主要研究动植物的形态和结构。而图像处理中的形态学,往往指的是数学形态学[18]。数学形态学是一门建立在格论和拓扑学基础之上的图像分析学科,是数学形态学图像处理的基本理论,其基本的运算包括腐蚀和膨胀。
简单来讲,形态学操作就是基于形状的一系列图像处理操作。OpenCV为进行图像的形态学变换提供了快捷、方便的函数。最基本的形态学操作有两种,分别是:膨胀与腐蚀。而腐蚀和膨胀是对白色部分(高亮部分)而言,不是黑色部分。膨胀是图像中的高亮部分进行膨胀,类似于“领域扩张”,效果图拥有比原图更大的高亮区域;腐蚀是原图中的高亮部分被腐蚀,类似于“领域被蚕食”,效果图拥有比原图更小的高亮区域。
从数学角度来说,膨胀或者腐蚀操作就是将图像(或图像的一部分区域,称之为A)与核(称之为B)进行卷积。核可以是任何形状和大小,它拥有一个单独定义出来的参考点,我们称其为锚点。多数情况下,核是一个小的,中间带有参考点和实心正方形或者圆盘。而膨胀就是求局部最大值的操作。核B与图形卷积,即计算核B覆盖的区域的像素点的最大值,并把这个最大值赋给参考点指定的像素。这样就会使图像中的高亮区域逐渐增长,如图4所示,这就是膨胀的初衷。
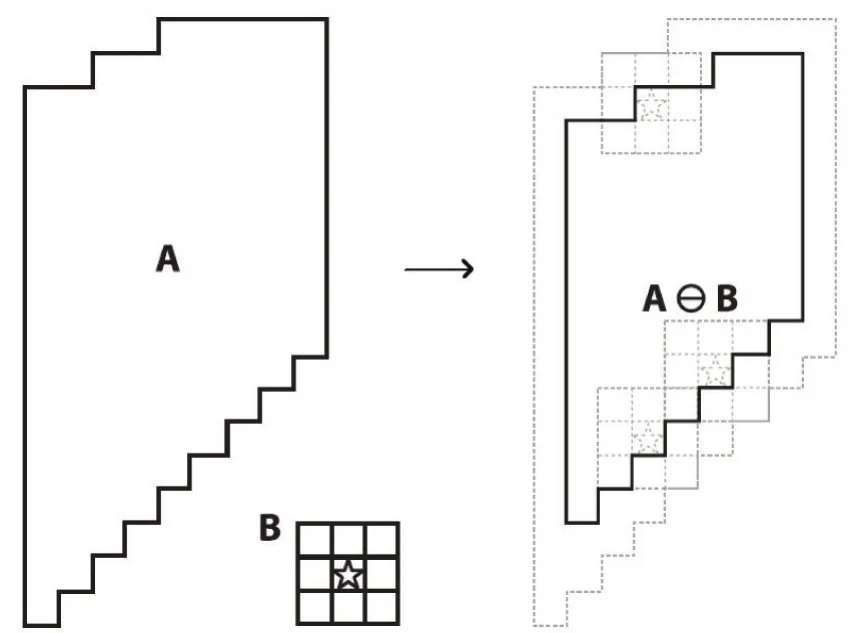
图4 膨胀操作原理Fig.4 The theory of morphological dilation
由上一步处理过后的图片可以知道,有些裂缝的区域未连通,这里采用膨胀对其进行操作,使裂缝区域能够连通并扩大,有利于下一步识别过程,如图5所示。
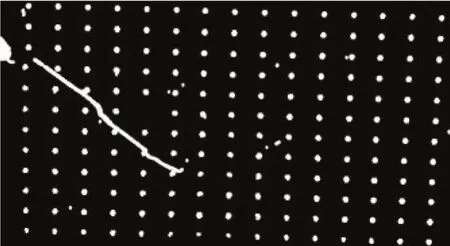
图5 膨胀效果图Fig.5 The image after dilating
2.4 中值滤波
图像滤波,旨在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制,是图像预处理中不可缺少的操作,其处理效果的好坏将直接影响到后续图像处理和分析的有效性和可靠性。图像滤波的目的有两个:一个是抽出对象的特征作为图像识别的特征模式;另一个是为适应图像处理的要求,消除图像数字化时所混入的噪声。而对滤波处理的要求也有两条:一是不能损坏图像的轮廓及边缘等重要信息;二是使图像清晰视觉效果好。
常用的图像滤波器主要有线性滤波操作的方框滤波、均值滤波、高斯滤波,非线性滤波操作的中值滤波和双边滤波。本实验采用的是非线性滤波操作的中值滤波,主要是因为中值滤波在一定的条件下可以克服常见线性滤波器,如最小均方滤波、方框滤波、均值滤波等带来的图像细节模糊,而且对滤波脉冲干扰及图像扫描噪声非常有效,也常用于保护边缘信息。
它的基本思想是用像素点邻域灰度值的中值来代替该像素点的灰度值,该方法在去除脉冲噪声、椒盐噪声的同时又能保留图像的边缘细节。具体步骤如下:
1)取3×3的函数窗,计算以点[i, j]为中心的函数窗像素中值。
2)按强度值大小排列像素点。
3)选择排序像素集的中间值作为点[i, j]的新值。
一般采用奇数点的邻域来计算中值,但像素点数为偶数时,中值就取排序像素中间两点的平均值。如图6所示,是中值滤波过后的效果图,可以看出噪声点很好地被去除了。
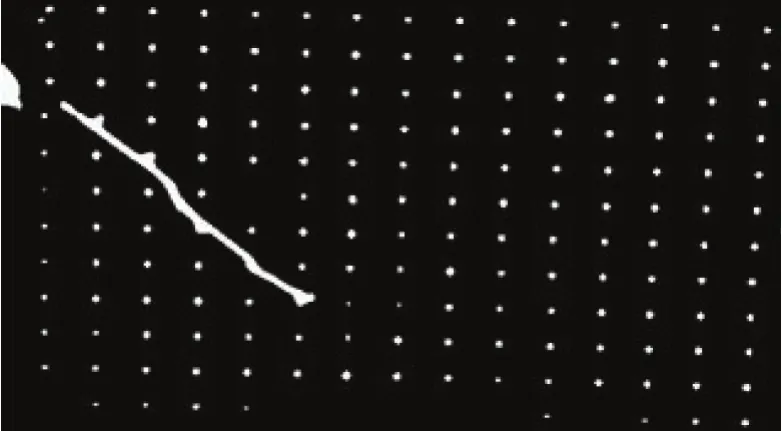
图6 中值滤波效果图Fig.6 The image after median filtering
2.5 区域标记
滤波过后的图像,没有了噪声点,但是要进行裂缝的区域标记,需要只保留裂缝的连通区域,于是采用一个面积滤波,即半径小于等于3个像素的连通区域都将其置0(黑),结果如图7所示。

图7 面积滤波效果图Fig.7 The result of area filtering
剩下的裂缝连通区域采用遍历图像矩阵法,查找最大连通区域,并将最大连通区域用最小外接矩形标记出来。如图8所示,图像中物体的外接矩形计算方法通常有两种:
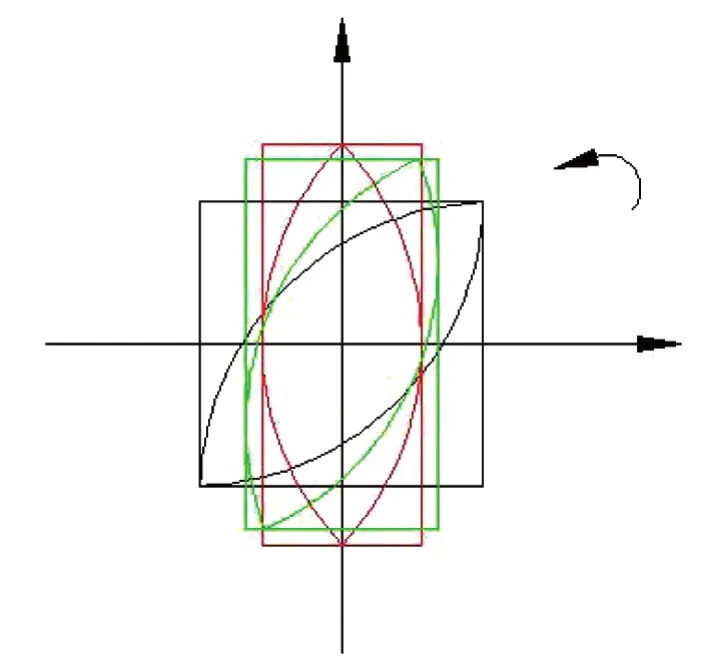
图8 外接矩形Fig.8 The enclosing rectangle
1)直接计算方法和等间隔旋转搜索方法。直接计算方法通过计算图像中物体分布坐标的最大、最小值所得,显然该矩形通常不能准确描述区域的分布。
2)等间隔旋转搜索方法将图像物体在90°范围内等间隔地旋转,每次记录其轮廓在坐标系方向上的外接矩形参数,通过计算外接矩形面积求取最小外接矩形。
第1步:按照直接计算方法计算某个轮廓区域的外接矩形,并记录外接矩形长度、宽度和面积,获取最小外接矩形RectMin,并得到其面积值赋给变量AreaMin,设置旋转角度α=0°;
第2步:对轮廓区域进行旋转一个角度θ,按照第1步求取旋转后的最小外接矩形RectTmp,获得其面积值赋给变量AreaTmp;
第3步:设置旋转角α=α+θ,比较AreaTmp和AreamMin的大小,将小面积值赋给AreaMin,并将此时的旋转角赋值给β=α,矩形信息赋给RectMin=RectTmp;
第4步:循环执行第2、3步的过程,最终获取一个最小的外接矩形RectMin以及与之相对应的旋转角度α;
第5步:将计算出的矩形RectMin反旋转一个β角度,获得最小外接矩形。
由最小外接矩形可以将裂缝的区域给标记出来,结果如图9所示。
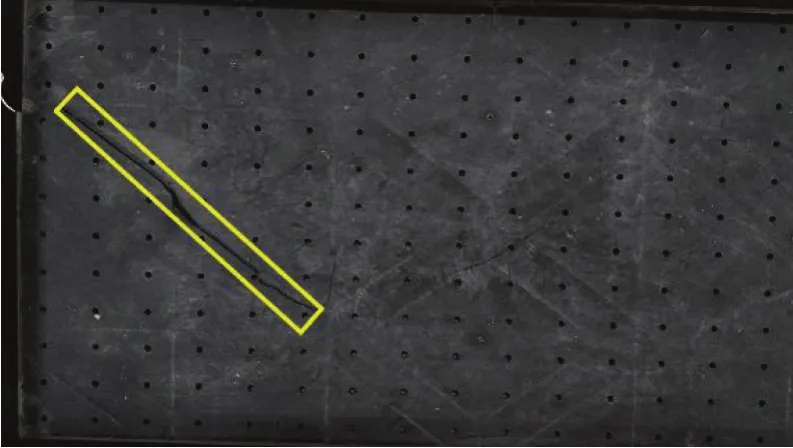
图9 裂缝的区域标记Fig.9 The marked crack
3 秧盘试验结果与分析
在试验之前需要进行育秧盘合格与不合格的标定,通过种子和土壤的外洒率和裂缝长宽的关系来标定育秧盘是否合格,如果裂缝过长或者宽度过大,育秧盘里面的种子和土壤就会外洒,严重影响育秧质量,这样的育秧盘应该判定其为不合格。为此,采集了多组育秧盘的裂缝长度和宽度数据进行试验分析,如表1所示。
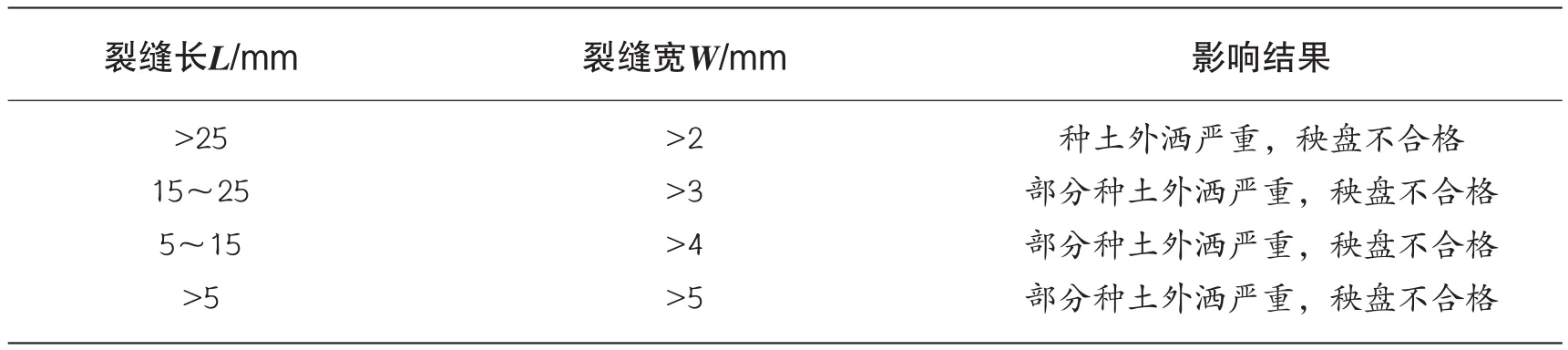
表1 育秧盘的判定准则Tab.1 The calibration of seedling tray
根据表1的数据,我们可以判定育秧盘是否合格,然后再把判断好的合格与不合格的育秧盘拿去检测,对比试验验证识别正确率。
试验时,采集了267幅合格与不合格育秧盘图像,并对其进行检测。试验结果如表2所示。
通过试验数据分析可知 ,合格秧盘的正确识别率还是很高的,而不合格秧盘的正确识别率比较低。
由于每个育秧盘的裂缝的长宽和位置都不相同,以及上面的泥土信息复杂没有规律,色差相差也不大。尤其是当裂缝的长度或宽度比较小,不合格育秧盘容易在图像处理过程中出现图像数据丢失或者图像数据冗余,以至于出现误判,将不合格的育秧盘判定为合格的育秧盘,造成识别正确率下降。
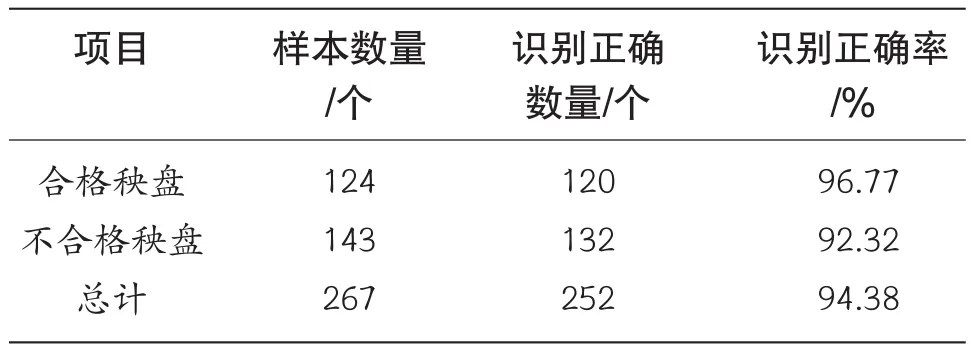
表2 秧盘试验结果Tab.2 The result of seedling tray test
4 结论
1)以水稻育秧盘裂缝RGB图像为研究对象,进行平均值灰度化法取得灰度图像后,采用自适应阈值处理算法将得到的灰度图像进行二值化,较好地分割和保留了裂缝信息。
2)通过对二值化的图像进行形态学膨胀,使得断裂处的裂缝能够连通,并通过中值滤波使噪声能够得到较好的去除,最后通过最小外接矩形进行区域标记,能够使裂缝信息标记出来。试验结果表明,该方法对育秧盘裂缝的正确识别率为94.38%。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
数学年刊A辑(中文版)(2020年2期)2020-07-25
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
中国临床医学影像杂志(2019年2期)2019-04-25
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
自动化学报(2017年5期)2017-05-14
中国继续医学教育(2015年2期)2016-01-06
中国当代医药(2015年36期)2015-03-11
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01
