永磁同步电机的改进对角递归神经网络PI控制策略
2019-06-11 07:37彭熙伟高瀚林
电机与控制学报 2019年4期
彭熙伟 高瀚林
摘 要:针对采用传统PI控制器的永磁同步电机交流伺服系统无法兼顾良好的速度响应性能和抗干扰能力的问题,提出一种将对角递归神经网络(DRNN)与PI控制相结合的控制算法,并引入学习率动态调整的思想对算法进行改进,解决固定学习率DRNN算法无法兼顾系统稳定性和较快学习速率的问题。建立永磁同步电机的仿真实验模型,并对传统PI控制器、固定学习率以及学习率可动态调整的DRNN-PI控制器的实验效果进行综合对比与分析,验证了采用改进后控制器的永磁同步电机交流伺服系统能够实现速度曲线无超调且不受负载转矩突变影响的良好控制效果。
关键词:伺服系统;永磁同步电机;神经网络;比例积分控制;计算机仿真
中图分类号:TP 273
文献标志码:A
文章编号:1007-449X(2019)04-0126-07
0 引 言
永磁同步电机(permanent magnet synchronous motor, PMSM)具有响应速度快、转子损耗低、结构紧凑、工作效率高等显著优点,现已被广泛应用在小功率伺服控制领域中[1]。由于PMSM是一个典型的高阶、强耦合、多变量、时变非线性的复杂系统,采用传统的PI控制器无法兼顾良好的速度响应性和强鲁棒性,难以得到理想的控制效果,因而永磁同步电机的先进控制策略逐渐成为了研究的热点。
在诸多智能控制策略中,由于神经网络控制具有极强的非线性拟合能力,能够通过自适应学习来映射任意的复杂非线性关系,此外其学习规则简单,参数整定方便,具有较强的自学习能力和鲁棒性,便于计算机编程实现,因此被广泛应用在各类非线性的伺服系统中[2]。文献[3]设计了一种径向基函数(radial-basis function, RBF)神经网络和滑模变相结合的控制器,提高了PMSM模型控制的稳定性和抗干扰能力。文献[4]提出了将反向传播(back propagation,BP)神经网络与PI控制策略相结合,实现了电梯用PMSM的调速控制。文献[5]利用dSPACE半物理仿真系统实现了神经网络的离线训练与PMSM系统的解耦控制。
由于RBF和BP网络均属于静态神经网络,因此对具有时变特性的PMSM系统的控制效果还有待改善。此外,神经网络的离线训练与学习会对控制系统的灵活性带来较大的影响。为此,本文提出了一种将动态的对角递归神经网络(diagonal recursion neural network, DRNN)和传统的PI控制策略相结合的复合控制器。在电机运动的初期,采用传统的PI控制策略控制系统,此时DRNN对系统进行在线学习。训练完成后则切换到DRNN-PI控制器进行系统控制,此时DRNN会根据电机的实际运行状态来实时调整最优的PI参数,从而提高PMSM系统的速度响应性能和鲁棒性,减小随机的负载变化和系统参数摄动对控制效果的影响。
1 PMSM伺服控制系统
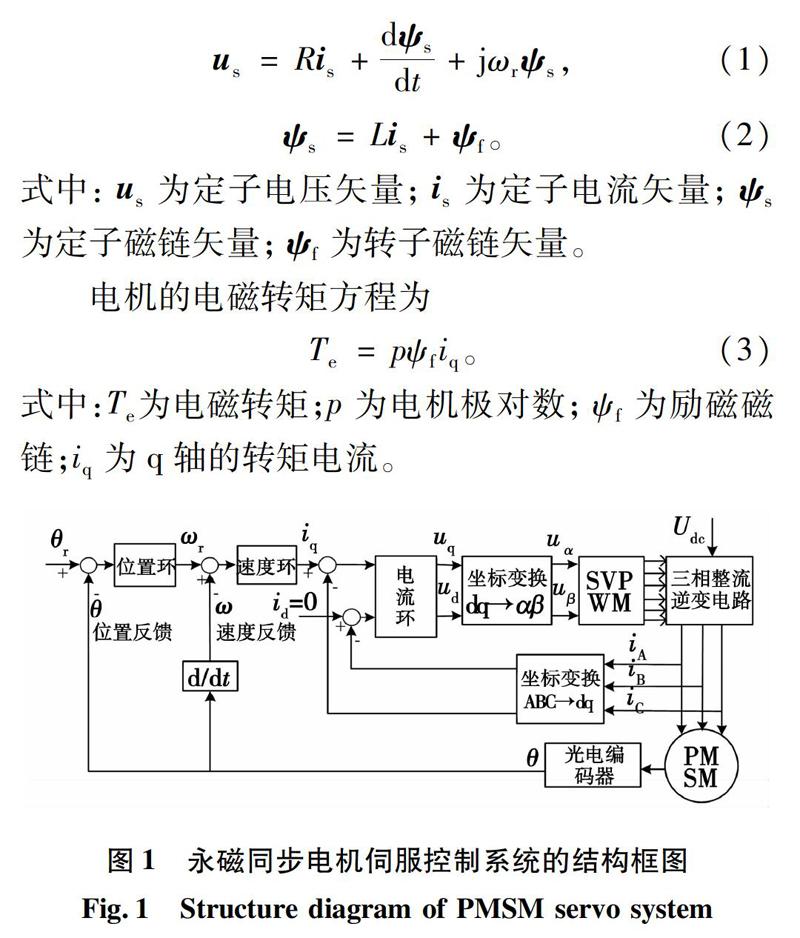
永磁同步电机伺服控制系统的结构框图如图1所示,采用位置环、速度环和电流环三闭环的控制方式。位置环控制器对位置反馈信号θ和给定信号θr进行处理并生成角速度指令信号ωr送入速度环,速度环控制器则根据指令信号ωr与反馈信号ω的差值来计算q轴的转矩电流iq[6]。
为了避免电枢反应的去磁作用,实现最大转矩电流比控制,电流环采用基于转子磁场定向id=0的控制方式,即在dq坐标系下通过控制转矩电流iq和励磁电流id来实现对电磁转矩的解耦控制[7]。
dq坐标系下PMSM定子电压矢量和磁链矢量的方程分别为:
2 DRNN-PI复合控制器的设计与改进
由于采用传统PI控制器的PMSM交流伺服系统能够得到理想的位移曲线却无法得到理想的速度曲线,因此位移环和电流环均采用PI控制器,速度环则采用DRNN-PI复合控制器以改善系统的速度响应特性。
2.1 对角递归神经网络的数学模型
对角递归神经网络与前馈网络类似,是由輸入层、隐含层和输出层3部分组成,不同之处在于其隐含层的格神经元有自反馈环[8]。对角递归神经网络的结构如图2所示。
在DRNN中,信号的处理有2个过程:前向处理和反向处理。前向处理与前馈网络类似,输入信号从输入层开始经隐含层到输出层按照正向依次计算,当输出层输出的结果与期望值一致时,则算法学习结束。
DRNN输入变量的个数取决于系统的复杂程度,增量式PID控制算法的表达式为
2.2 控制器的设计
在电机运动初期由于DRNN-PI控制器需要一段时间对系统进行学习,且初期时输入控制器的误差较大会影响到DRNN的学习收敛速度,因此初始阶段采用传统的PI控制器对电机进行控制,此时DRNN则根据2.1节中的学习算法进行自适应训练[12]。经过一段时间后,在PI控制器的作用下系统的误差减小,且DRNN-PI控制器完成了训练与学习,此时切换到DRNN-PI控制器来对电机进行控制。与传统的PI控制器相比,经DRNN优化后的复合PI控制器可以根据系统的实际运行状态灵活的自适应调整参数,提高系统的速度响应性能,并增强系统的抗干扰能力。
根据电机系统的实际运行情况,算法切换条件设置为电机运行时间超过速度曲线上升时间的50%且误差小于期望值10%时进行控制权的切换。DRNN- PI复合控制器的结构如图3所示。
2.3 控制器的改进
由2.1节DRNN的学习算法可知,DRNN的学习收敛速度和学习效果取决于学习率η的取值。当学习率η的取值较大时,虽然可以提高控制器的学习收敛速度,但是对电机系统转速的稳定性会带来影响,甚至可能引起一定程度的转速震荡;当学习率η的取值较小时,虽然可以维持转速的稳定,但是会降低控制器的学习收敛速度,甚至影响到控制器的控制效果。因此固定学习率的DRNN-PI控制器无法兼顾较快的学习速度和系统的稳定性,需要加以改进。
为此,引入动态学习率调整的思想,即根据电机的运行状态来实时调整学习率的取值。调整原则为在DRNN算法前期的学习过程中以及系统负载转矩出现较大波动时,采用较大的学习率以加快控制器的学习收敛速度,提高控制器的灵敏度,当电机转速趋于稳定后则适当降低学习率以保证系统的稳定性。
3 仿真与实验
3.1 仿真结果与分析
本文根据HIWIN永磁同步电机的实际参数在Matlab/SIMULINK环境下搭建了基于空间矢量脉宽调制法(space vector pulse width modulation,SVPWM)的PMSM系统仿真模型。仿真所用到的电机主要参数如表1所示。
SIMULINK仿真时采用变步长(variable-step)算法,解算器(solver)采用ode45(Dormand-Prince),仿真时间为2.5 s。
1)控制器改进前后效果对比。
给定位置设为300 rad,最大转速限制设为314 rad/s,采用固定学习率和学习率动态调整的DRNN-PI复合控制器的仿真实验曲线分别如图4和图5所示。
由图4和图5对比可见,采用固定学习率控制器的系统,其转速在进入恒速段后存在最大振幅约为4 rad/s的高频振动,其转矩曲线的抖振也非常明显,幅值高达0.3 N·m;而采用学习率动态调整控制器的系统,其转速在电机的运动过程中没有出现明显的振荡,转矩曲线也的振动幅度为0.08 N·m,相较于前者也有显著的改善。可见,采用学习率动态调整的思想对控制器加以改进,在确保快速学习收敛速度同时能够有效地改善系统的稳定性。
2)定值负载干扰。
给定电机位置设为300 rad,最大转速限制设为314 rad/s,负载转矩设为0.15 N·m并在0.05 s时突变为0.35 N·m。转速的仿真实验曲线如图6所示。
从图6中可以看到,选用较大比例系数PI控制器的系统,转速出现了10%的超调,在0.05 s负载发生突变时,出现了约4 rad/s的小幅下降,并在0.05 s内恢复;选用较小比例系数PI控制器的系统,其转速虽然没有出现超调,但是上升时间长达0.01 s,且在负载突变时出现了约14 rad/s的大幅下降,并经过0.03 s后才得以恢复,可见两者的速度响应性能均不理想。而采用DRNN-PI复合控制器的系统,上升时间为0.006 s,其转速没有出现超调也没有受到负载突变的影响。由此可见,DRNN-PI复合控制器能够弥补传统PI控制器的不足,具有较强的鲁棒性和良好的速度响应性能。
3)随机变负载干扰。
为了检验控制器在随机变负载下的控制效果,在仿真模型中引入范围在0~0.3 N·m之间的随机时变负载。给定位置设为300 rad,随机负载转矩的变化曲线如图7所示。
在此条件下对3个控制器进行仿真实验,得到转速的仿真实验曲线如图8所示。
从图8中可以看到,选用较大比例系数PI控制器的系统,其转速出现了約9.8%的严重超调,在随机变负载的干扰下, 转速出现了最大振幅约为8 rad/s的明显波动;采用较小比例系数PI控制器的系统,其转速虽然没有出现超调,但是上升时间长达0.008 s,且转速无法保持稳定,会出现最大振幅约为16 rad/s的严重波动。而采用DRNN-PI复合控制器的系统,其转速曲线的上升时间仅为0.003 s,响应速度很快,且没有出现超调,在随机变负载的干扰下,其转速依然能够保持稳定,具有很强的抗干扰能力。由此可见,DRNN-PI复合控制器相较于传统的PI控制器,其控制效果有显著改善,能够兼顾良好的速度相应性能和强鲁棒性。
3.2 实验结果与分析
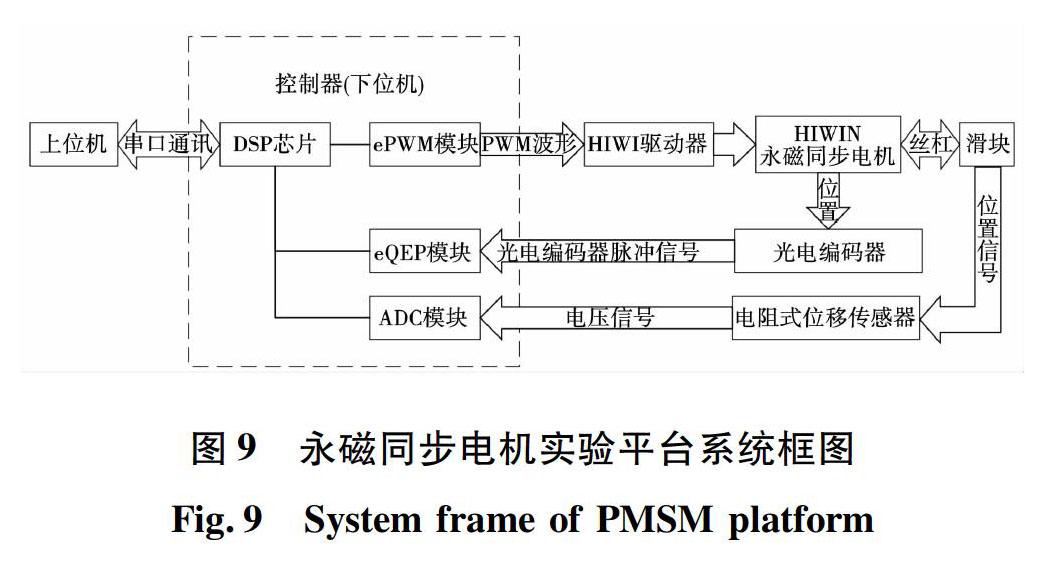
本实验平台采用台湾HIWIN永磁同步电机作为执行机构,其额定功率为100 W,额定转速为3 000 r/min,额定转矩为0.32 N·m,并配有精度为2500PPR的增量式光电编码器和驱动器。控制器采用DSP芯片F28335为核心,PWM开关频率为200 kHz。该实验平台的组成结构如图9所示。
由于实验平台所采用的普通丝杠不够顺畅,在整个行程中的摩擦力矩并不均匀,在电机运行到200 rad时会出现较大突变,这相当于为电机系统添加了随机变负载的干扰,较适合用来检测控制器的控制效果。
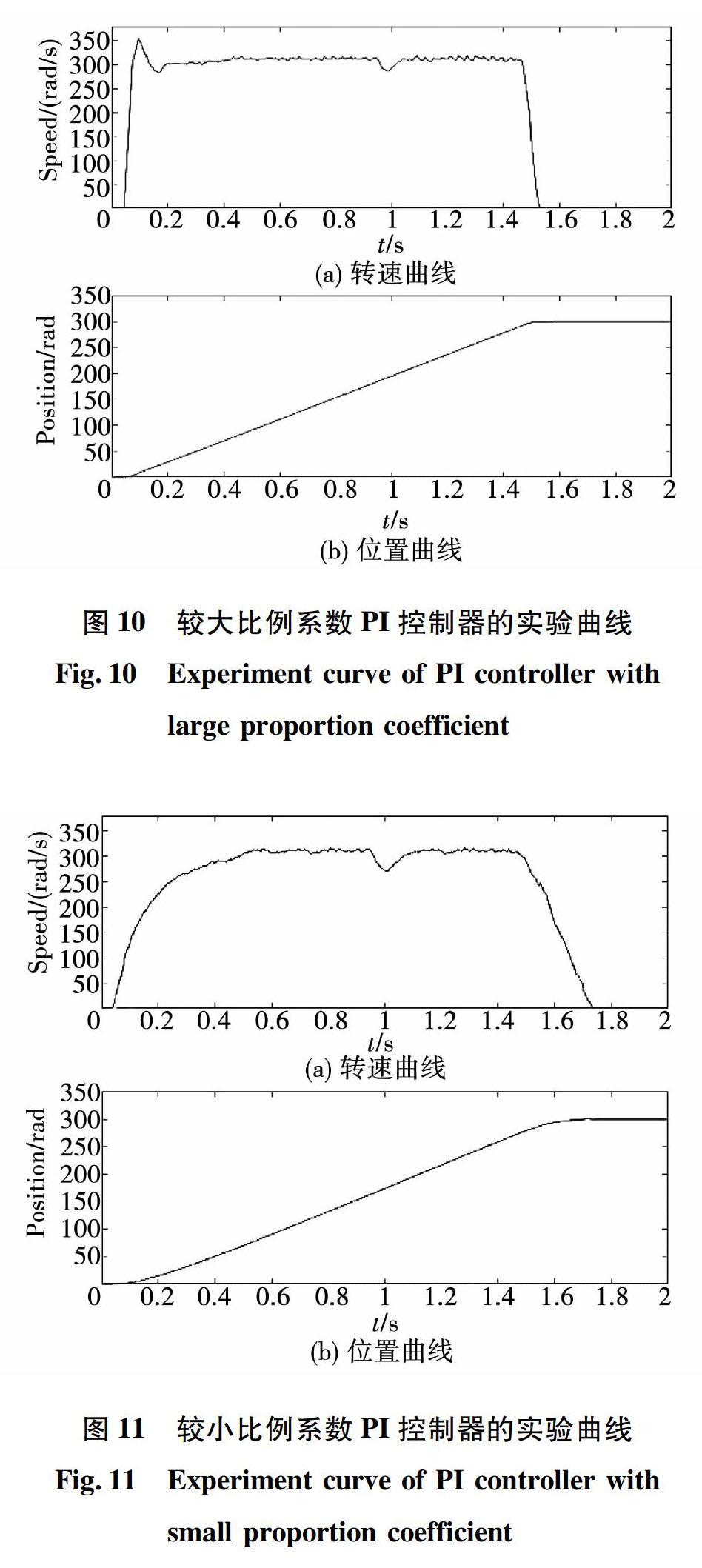
给定位置设为300 rad,最大转速限制设为314 rad/s,分别采用大小2组比例系数PI控制器和DRNN-PI复合控制器进行实验,得到3组实验曲线分别如图10、图11和图12所示。
由图10~图12中的响应曲线对比可知,3种控制器的位置曲线都较为理想,能够满足实验要求。但采用较大比例系数PI控制器的系统,其转速出现了约14%的严重超调,上升时间约为0.07 s,当负载出现较大突变时,其转速下降约为28 rad/s;而采用较小比例系数PI控制器的系统,其转速没有出现超调,但上升时间长达0.6 s,当负载发生突变时,转速下降高达52 rad/s。可见采用传统PI控制器的系统,其速度响应不甚理想,无法兼顾较快的响应速度和良好的抗干扰能力。
而采用DRNN-PI复合控制器的系统,其转速没有出现明显的超调,上升时间为0.07 s,当负载出现较大突变时,转速下降仅为12 rad/s,且在0.03 s内恢复,具有较快的响应速度和较强的抗干扰能力,实验结果与仿真结果一致。
4 结 论
针对具有时变非线性特性的永磁同步电机交流伺服系统,提出了一种将对角递归神经网络与PI控制算法相结合的复合控制器,并采用学习率动态调整的思想加以改进。大量仿真结果表明:相较于传统的PI控制器和DRNN-PI控制器,采用学习率可动态调整的DRNN-PI复合控制器的系统,其转速曲线上升时间短,不出现超调,且不受负载变化的影响,能够兼顾较快的响应速度和强鲁棒性,并具备较快的学习收敛速度和良好的稳定性。最后,通过HIWIN永磁同步电机实验平台上的实验,验证了本文提出的理论和仿真的正确性。
参 考 文 献:
[1]舒志兵. 交流伺服运动控制系统[M]. 北京:清华大学出版社,2006:44-76.
[2]刘金琨. 智能控制[M].3版.北京:电子工业出版社, 2014:120-124.
[3]刘治钢, 王军政, 赵江波. 永磁同步电机神经网络自适应滑模控制器设计[J]. 电机与控制学报, 2009, 13(2):290.
LIU Zhigang, WANG Junzheng, ZHAO Jiangbo. Neural network adaptive sliding mode control for permanent magnet synchronous motor[J]. Electric Machines and Control, 2009, 13(2):290.
[4]王同旭, 马鸿雁, 聂沐晗. 电梯用永磁同步电机BP神经网络PID调速控制方法的研究[J]. 电工技术学报,2015,30(S1):43.
WANG Tongxu, MA Hongyan, NIE Muhan. The research of PMSM BP neural network PID control in elevator[J]. Transactions of China Electrotechnical Society,2015,30(S1):43.
[5]赵君, 刘卫国, 骆光照, 等. 永磁同步电机神经网络逆解耦控制研究[J]. 电机与控制学报,2012,16(3):90.
ZHAO Jun, LIU Weiguo, LUO Guangzhao, et al. Decoupling control of PMSM based on artificial neural network inverse method[J]. Electric Machines and Control, 2012,16(3):90.
[6]杜坤梅, 吕春宇, 芦宇峰, 等. 永磁同步电动机转子位置检测方法[J]. 哈尔滨理工大学学报,2008,13(6):98.
DU Kunmei, LV Chunyu, LU Yufeng, et al. The method of rotor position detection for PMSM[J]. Journal of Harbin University of Science and Technology, 2008,13(6):98.
[7]熊健, 康勇, 张凯,等.电压空间矢量调制与常规SPWM的比较研究[J]. 电力电子技术, 1999, 33(1): 25.
XIONG Jian, KANG Yong, ZHANG Kai,et al.Comparison study of voltage space vector PWM and conventional SPWM[J]. Power Electronics Editorial, 1999, 33(1): 25.
[8]段慧达, 郑德玲, 刘聪. 基于对角递归神经网络的建模及应用[J]. 北京科技大学学报, 2004, 26(1):103.
DUAN Huida, ZHENG Deling, LIU Cong. Modeling and application based on diagonal recurrent neural network[J]. Journal of University of Science and Technology Beijing, 2004, 26(1):103.
[9]GUO Ben, HU Liying, BAI Yang. PMSM servo system based on dynamic recurrent neural networks PID controller[C]//Power Electronics and Motion Control Conference, June 2-5,2012, Harbin,China.2012:2417-2421.
[10]KU C C, LEE K Y. Diagonal recurrent neural networks for dynamic systems control[J]. IEEE Transactions on Neural Networks, 1997, 8(3): 811.
[11]FU K. Learning control systems and intelligent control systems: An intersection of artifical intelligence and automatic control[J]. IEEE Transactions on Automatic Control, 1971, 16(1): 70.
[12]王俊國, 王永骥, 万淑芸. 基于动态神经网络的PID参数整定与实时控制[J]. 系统工程与电子技术, 2004, 26(6):777.
WANG Junguo, WANG Yongji, WAN Shuyun. PID parameter self-tuning and real-time control based on dynamic neural network[J]. Systems Engineering and Electronics, 2004, 26(6):777.
(编辑:邱赫男)
猜你喜欢
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
科技视界(2016年23期)2016-11-04
中国市场(2016年19期)2016-06-06
科技视界(2016年12期)2016-05-25
科技视界(2016年11期)2016-05-23
现代电子技术(2015年15期)2015-08-14