
海底管道探测技术应用
2019-07-11 01:41刘振方1朱友生陈冠军
中国海洋平台 2019年3期
刘振方1, 朱友生, 陈冠军
(1.中海油田服务股份有限公司, 河北 三河 065201; 2.中海油田服务股份有限公司 物探事业部工程勘察作业公司, 天津300451)
0 引 言
海底管道是海上油气输送的大动脉,是海上油气田的重要组成部分。海底管道受渔业活动、地质灾害等各种复杂因素影响,一旦泄漏,将会造成严重的环境污染、经济损失和社会影响,因而有必要及时有效地查明海底管道的位置和状态,评价其安全风险并及时维护。
本文通过分析多种海底管道探测技术的原理、影响因素及优缺点,将其划分为两大类:一类是工程物探法,一般用于大面积普查;另一类是潜水作业法,一般针对普查中发现的重大隐患及已建平台附近小范围的详查和检修等。结合多年实际调查作业经验,总结这些技术在各种环境条件下的适用性和经济性,根据中国海上油田不同海域环境条件推荐相应的管道探测方案,为海底管道的维护和安全运营提供技术保障,供相关技术和管理人员参考。
1 工程物探法
海底管道和周围地层沉积物在声波、电磁等物理性质方面存在差异。工程物探法就是利用各种物探设备寻找、识别和分析各种差异,以达到探测目的。这类探测技术主要有测深仪(单波束和多波束)探测、侧扫声呐探测、扫描声呐探测、合成孔径声呐探测、浅地层剖面探测和磁力仪探测等[1-5]。
1.1 测深仪探测
测深仪的工作原理是由换能器向水中发射一个(单波束)或多个(多波束)具有一定空间指向性的短脉冲声波(波束),波束到达海底后,发生反射、透射和散射,回波被换能器接收,根据声速和传播时长可计算换能器到海底的距离。重复这一过程就可对水深进行连续测量,利用这一特点,可实现对海底管道的探测。与单波束相比,多波束测深具有直观、高效和高分辨率等特点[6]。

图1 南海某区多波束图像显示裸露与悬空的管道
当海底管道裸露或悬空时,可通过测量管道与海底面的相对高差判断管道的状况:相对高差大于管径时为悬空,等于或小于管径时为裸露[3,7],如图1所示。这种判断方法通常对敷设于海底面的管道有效,当管道敷设于管沟中时,测探仪的探测能力受水深、沟宽和沟深等因素的影响。水深的增大将导致换能器单位时间内能接收到的有效声信号数目(即采样更新率)减少,分辨率降低[7-8];在同一水深处,波束角越小,反映的微地貌越细致,大波束角的测深仪无法将海底管道和沟坡区分开来。由于受到波束角的影响,探测到的管沟有可能发生形变,与管道的反射相互混淆,造成解释困难。
另外,测深仪发射的声波无法接触到埋藏的海底管道,无法探测其位置及埋深,此时需结合其他设备[7-9]进行测量。
1.2 侧扫声呐探测
侧扫声呐俗称海底扫描[2,9],主要根据声波发射和返回时间的长短,用不同的灰度加以显示,形成海底探测带的声学图谱图像,可清楚地看到海底的特征和位于海底面的目标物。根据侧扫声呐的几何关系,运用相似三角形原理,可计算出目标物的高度[10];侧扫声呐还可以探测海底目标物(包括海底管道)的位置、状态、规模等。在出现管道的侧扫声呐图像中,可根据管道两侧的阴影判断其状态[2,10]。侧扫声呐图像中的海底管道如图2所示。

图2 渤海某区侧扫声呐图像中的海底管道
基于侧扫声呐的原理,可以得出结论:对于裸露的管道,特别是有一定长度规模或有水泥压块防护等辅助设施的管道(见图2),侧扫声呐探测效果显著、精度高、可靠性强,能够达到事半功倍的效果;对于掩埋的管道,其探测效果较差[4,11],仅可对掩埋状态进行确认,对掩埋位置只能根据管道埋设留下的痕迹作出大致判断,探测埋深还需结合其他技术[2,10]。

图3 MS1000扫描声呐
1.3 扫描声呐探测
扫描声呐相当于一种定点可旋转式的侧扫声呐,其原理为:换能器发射声脉冲,遇到海底或物体时反射回波,回波被声呐接收后,根据信号时延和强度形成图像,然后旋转声呐探头,再次重复发射和接收过程,最后旋转360°形成一幅完整的海底图像。在作业时,探头由一个三脚支架固定,将三脚支架放到海底后,探头靠重力作用在水中保持竖直,通过一根电缆对其进行供电及数据传输,如图3所示。扫描声呐的扫描范围在0.5~100.0 m之间,可用不同的量程记录声呐图像。量程越小,分辨率越高,图像越清晰,细小的物体也越容易被探测到。

图4 渤海某平台扫描声呐图像中显示的海底管道(局部有水泥压块防护)
扫描声呐调查具有作业效率高、准确性高、成图直观等优点。作业受天气及周围施工影响小,2~3人即可,携带设备少、使用方便、操作简单,可依托已建平台或船舶实施作业。
但是,扫描声呐也存在一些不足之处:与侧扫声呐类似,无法探测掩埋的管道;声呐探头放入海底后,无法确定探头初始方位,扫描图像缺少有效的坐标信息;必须在扫描图像上找到两个已知坐标的参考点(通常选取平台桩腿)对图像进行修正(见图4),对于没有明显参考点的调查区域则无法得出其坐标信息。因此,一般在已建平台附近使用扫描声呐进行海底管道及地貌探测。
1.4 合成孔径声呐探测
合成孔径声呐(Synthetic Aperture Sonar,SAS)是一种高分辨率成像声呐,其基本原理是利用小尺寸基阵在运动轨迹上的顺序位置发射并接收回波信号,根据空间位置和相位关系,对不同位置的回波信号进行相干叠加处理,进而获得沿运动方向的高分辨率声呐图像。合成孔径技术主要有两项优点:一是对目标的分辨能力与距离和采用的声信号频率无关;二是可以采用小尺度的声呐基阵获得高分辨率的目标图像,且方位向分辨率在全测绘带上保持恒定高分辨率,不受作用距离影响。因此,SAS探测技术是掩埋目标(包括管道)探测的理想技术。
SAS探测方式与侧扫声呐探测方式基本一致,都是将换能器固定于船侧某一位置或者拖曳于船尾一定距离,开动船只,在设计的测线上低速航行并进行同步定位。SAS也可搭载于水下自治机器人(Autonomous Underwater Vehicle,AUV)或遥控无人潜水器(Remote Operated Vehicle,ROV)上进行探测作业。
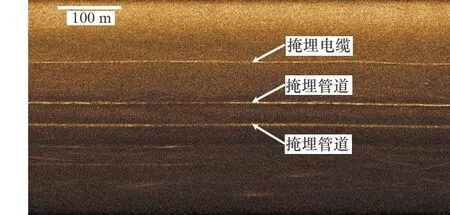
图5 SAS图像中的管道
双频SAS在进行海底管道探测时,最大探测宽度可达300 m,探测深度可达2 m,在探测宽度范围内可以探测出连续的管道图像,易对海底管道进行追踪,如图5所示。其弥补了浅地层剖面仪只能垂向交点探测的不足,提高了探测精度和工作效率,是掩埋海底管道探测的有效技术手段。但是,现阶段双频SAS只能定性判断管道的掩埋深度[12]。与其他设备相比,双频SAS设备价格昂贵,性价比相对较低。
1.5 浅地层剖面探测
浅地层剖面探测是一种基于水声学原理的连续走航式探测水下浅地层结构和构造的地球物理方法,其基本原理与测深仪类似,通过换能器将控制信号转换成声脉冲向海底发射,该声脉冲在海水和地层传播过程中遇到声阻抗界面,一部分反射回换能器,另一部分继续向地层深处传播,同时回波陆续返回,声波传播的声能逐渐损失,直到耗尽为止,这些返回来的声波被仪器接受并转换成模拟或数字信号记录和储存,最后输出为反映地层声学特征的剖面[13]。
海底管道在浅地层剖面仪图像上表现为一条抛物线,抛物线顶点就是管道的平面位置,抛物线顶点到海底面的垂距就是管道的掩埋深度或裸露悬空高度。根据管道引起的抛物线顶点位置与海底反射之间的相互关系判断管道的空间状态:如果抛物线顶点位于海底反射以上,且高度大于管道直径,则为悬空;如果高度小于管道直径,则为裸露,如图6所示;如果抛物线顶点位于海底反射以下,则为掩埋[1,13],如图7所示。

图6 南海某区浅地层剖面图上裸露的管道 图7 渤海某区浅地层剖面图上掩埋的管道
浅地层剖面仪探测海底管道属于剖面探测,在与管道垂直的测线上具有很好的探测效果,但由于管道是连续的,这就会留下很长距离的空白段,探测这些空白段的管道需要结合其他设备进行。例如,对于平面位置不明确的管道,需结合磁力探测或侧扫声呐探测,先进行区域探测,确定管道的大致分布区域后再进行浅地层剖面探测,以获得海底管道的准确参数。
调查表明,海底底质、气水界面、外界噪声、海况等多种海上环境因素对探测效果有较大影响[2]。实践证明,使用浅地层剖面仪探测管径小于101.6 mm的管道效果较差[14]。
1.6 磁力仪探测
磁力仪可以探测各种不同直径的海底管道,但无法探测非金属材料管道[12]。对于金属材料制成的海底管道使用磁力仪探测时,磁力调查测线一般垂直于管道走向布设[15],当作业船携带或拖曳磁力仪在管道上方经过时,磁力仪将有异常值显示,将每条测线上的磁力异常点位置连接在一起,就可以确定管道的位置和走向[4,15]。
物体在某点的磁场强度与该物体的体积及性质成正比,与距该物体的距离的三次方成反比。在探测直径较小或者埋深较大的管道时,应采取一些必要措施,以提高探测精度,如:适当降低船速、在磁力仪附近增加配重等,使磁力仪的拖鱼尽量靠近海底(一般距离海底4~8 m为宜);使用小吨位和无磁性或弱磁性的木质小渔船作为测量船;调查过程中拖缆长度应大于船长的3倍以上[12,15]。
海底管道的磁力异常容易受到周围介质的影响,如果在管道周围存在钢板、钢管、铁丝、锚链以及平台时,探测结果将会有偏差,因此,在近平台海底管道调查时,需采用其他探测方式进行。
2 潜水作业法
与工程物探法相比,潜水作业法更直观。潜水作业法有人工潜水探摸和ROV搭载两种方式。潜水探摸即潜水员入水对海底管道进行探摸,确定管道位置及状态[16]。ROV搭载是由水面母船上的工作人员利用连接ROV的脐带缆,操纵ROV通过搭载水下摄像机、各种声呐等专用设备进行直观观察或探测,还能通过多功能机械手进行相关水下作业[17]。ROV搭载可以理解为人工潜水探摸的延伸,是一种直接接触式的方法,同时还可搭载多种物探设备进行探测,也可称为一种综合探测方法。
2.1 潜水探摸探测技术
潜水探摸探测技术是指潜水员携带超短基线(Ultra Short Base Line,USBL)水下定位系统的信标入水直接对海底管道进行目视检查的一种方法。海底管道的位置使用水面差分全球导航卫星系统(Differential Global Navigation Satellite System,DGNSS)和USBL水下定位系统对潜水员进行综合定位间接确定;管道状态依靠潜水员头顶携带的水下摄像机及潜水员的目视检查结果确定。
潜水探摸对于裸露管道可准确定位。作业时潜水员沿管道每隔2~5 m采集一个点,根据潜水员携带的摄像机及视觉描述,可获得定位点处管道的状态,如裸露长度、悬跨高度、周围障碍物情况等。潜水员近距离接触管道易发现工程物探方法不易发现的障碍物及损伤等状况,不仅能校核工程物探结果的可靠性,而且也提高了探测结果的准确性[16]。潜水探摸可依托已建平台、四点锚泊船舶或动力定位船舶探测海底管道。
潜水探摸作业受天气影响大,风险高,作业效率低(仅在平潮期作业),作业人员和设备多受平台场地限制,成本相对较高,在水深大于60 m或水流较急的情况下潜水员入水危险性相当大。
2.2 ROV搭载管道探测技术
ROV搭载管道探测技术主要利用ROV搭载相关的物探设备进行海底管道探测。在一般情况下,母船应为动力定位船,同时配备水下定位系统对ROV进行定位。一般来看,ROV搭载管道探测技术包括以下几种:
(1) ROV搭载水下摄像机。该方法获得的资料比较直观易判读,容易确定管道精确位置。但是,该方法要求海水清澈,在水质浑浊地区不太适用,如图8所示。

图8 工作级ROV及作业时拍摄的海底管道
(2) ROV搭载声呐(多波束测深仪、侧扫声呐、扫描声呐、高清晰度双频识别声呐)。该方法获得的资料直观易判读,也容易确定管道精确位置,对海水的清晰度没有要求。
(3) ROV搭载双头截面扫描仪。该方法类似于浅地层剖面仪,用于管道断面扫描和悬空探测,资料成果的优缺点与浅地层剖面仪基本一致。
(4) ROV搭载TSS 350/440管道探测仪、海底成像仪等。该方法可以对管道两侧一定范围(20 m以内)、海底以下一定深度范围(5 m以内)进行探测,可对海底管道进行连续跟踪探测[18]。
综上所述,ROV搭载管道探测技术优点在于用机器人代替人,降低了作业风险,动力充足,可满足复杂的探测设备和较大的作业机械用电,信息和数据的传递和交换快捷方便、数据量大,采集的资料质量高。但是,在作业时需要动力定位船只,需要水下定位系统及搭载专业探测设备和作业人员,资料采集速度慢(1 kn左右)、作业效率低、成本高,(1)和(2)都不能探测掩埋的管道,这些因素都限制了ROV搭载管道探测技术的广泛使用。
3 探测技术比较分析及应用方案
上述各种探测技术在探测海底管道的空间状态方面均能取得一定的效果。结合多年管道探测的工程经验和实际效果,从原理、影响因素、优缺点、所需作业人员数量、作业载体、作业设备采购成本等方面,对各种管道探测技术进行对比分析,如表1所示。

表1 海底管道探测技术对比
根据中国海上油田的水深及自然环境条件,综合考虑作业效率和成本,对于各海区管道探测技术的应用提出如下方案。
3.1 渤海探测方案
渤海海域水体浑浊、能见度较低,已开发的油气田水深一般小于30 m,可使用综合管道探测技术对平台间海底管道进行探测,即:使用单波束、多波束、侧扫声呐对海底管道周围海底地形地貌、障碍物及状态(裸露/掩埋)进行探测,使用浅地层剖面仪探测海底管道的位置及埋深。该方案具有作业效率高(可24 h连续作业,作业时速可达3~5 kn)、成本低(使用小型作业船舶即可)的优势。考虑到综合管道探测方法在近平台段(已建平台周围100 m范围内)的局限性(为保证已建设施、作业船舶和设备的安全造成的数据无法全覆盖、已建平台对定位及探测信号的干扰等),对平台周围100 m以内的海底管道建议以扫描声呐为主、潜水探摸为辅进行探测。这种分区域综合探测技术充分发挥了各种探测技术的优点,既提高探测效率,又满足对数据质量和精度的要求。在进行数据处理时,可将各种探测数据进行综合分析、相互检核,从而最终确定管道的准确位置和状态。
上述方法在绥中36-1油田群、秦皇岛32-6油田、渤中28/34油田群进行了应用,实际效果良好。在一次性调查工作量较大时,也可考虑使用单波束、多波束、合成孔径声呐、浅地层剖面等组合的综合探测方式进行作业,同样可以达到类似的应用效果。但是,在工作量不大的情况下,由于合成孔径声呐价格昂贵,经济性并不强,因此不推荐使用。
3.2 东海探测方案
东海海域水质良好,已开发的油气田水深在100 m左右,但登陆管道所在的近岸区域水体浑浊,能见度较低。对东海海域平台间海底管道及登陆管道可使用综合管道探测技术进行探测,同时使用USBL水下定位系统对水下拖体进行定位,以提高探测定位精度。平台周围100 m以内的海底管道宜使用ROV搭载管道探测技术进行作业,能保证探测效果和精度,但成本较高,经济性也不强。作业者可根据油气田生产运营的实际需要选择合适的方法。
3.3 南海探测方案
南海海域跨度较大,已开发的油气田水深从几十米到1 500 m左右不等,海底管道探测方案可按水深和区域分类。北部湾涠洲、乌石海域已开发的油气田区水深一般小于60 m,管道探测方案可借鉴渤海海域;北部湾东方、乐东及其他大部分水深大于60 m但小于150 m的油气田区域的管道探测方案可借鉴东海海域;在水深大于150 m的海域,海底管道大部分不掩埋,由于南海地质条件复杂,推荐使用ROV搭载管道探测技术进行作业。因此,在海上油田海底管道维护和安全运营中,应根据水深、环境条件、管道性质、规模及埋设方式等,选择合适、经济、有效的管道探测方案。
4 结 论
本文系统地总结了各种管道探测方法的基本原理、影响因素、优缺点及适用性等。根据这些特点,将管道探测技术划分为两大类:工程物探法和潜水作业法。结合多年调查作业经验和中国不同海域油气田的水深、环境条件、管道性质、规模及埋设方式等,推荐相应的管道探测方案,为海底管道的维护和安全运营提供技术保障,供相关技术和管理人员参考。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
建材发展导向(2021年19期)2021-12-06
河北地质(2021年2期)2021-08-21
成都信息工程大学学报(2021年6期)2021-02-12
石材(2020年12期)2021-01-15
矿产勘查(2020年8期)2020-12-25
海洋信息技术与应用(2020年3期)2020-08-24
舰船科学技术(2020年3期)2020-04-22
小学科学(学生版)(2019年10期)2019-11-16
