
一类非线性多智能体系统指定性能容错控制
2019-07-16 12:28王东阳李永明
重庆理工大学学报(自然科学) 2019年6期
王东阳,李永明
(辽宁工业大学 理学院, 辽宁 锦州 121001)
近几十年来,多智能系统的协同控制由于其在科学和工程领域的广泛应用而受到越来越多的关注,已成为一个十分重要的研究方向。与传统的单一非线性系统相比,多智能系统由于其在有向拓扑下的多个智能体之间可以通过互相协调合作来共同完成指定的控制目标,使得多智能系统具有更强的鲁棒性和更好的可调控性,并被应用在例如航天器的编队飞行,移动机器人的协调控制以及船舶的编队控制等领域。协同控制是多智能系统协调控制的基础问题,目前已有很多研究成果。文献[1-3]基于图论和矩阵理论,研究了线性系统的协同控制问题;文献[4-6]中提出的协同控制算法要求系统的非线性函数满足Lipschtiz条件。但在实际控制系统中,传感器的精度和外部条件的变化都会导致系统存在不确定性。文献[7-10]提出了基于模糊逻辑系统或神经网络的自适应协同控制算法;文献[9]针对带有不确定扰动的非线性多智能体系统,提出了基于神经网络自适应协同控制算法;文献[10]针对带有输入饱和的非线性多智能体系统,提出了基于模糊逻辑系统的自适应协同控制方案。
随着科学技术的不断发展,为了满足人们日益增长的研究需要以及现代化生产,控制系统变得日渐大型化、复杂化,系统中的传感器、执行器等部件的数量和复杂性也日益增加。那么,整个系统运行的稳定性和完整性变得更加重要,且更有难度,一旦系统内的元部件哪怕出现一个小的故障,系统运转的安全性就可能得不到保证。因此,容错控制得到了广泛的重视,与传统的单一非线性故障系统不同的是,多智能系统的故障可以分为两类:一类是智能体之间通信网络的故障,另一类是自身的故障。目前,关于多故障系统协同控制问题的文献研究很多[11-15],文献[13]研究了在严格反馈条件下的非线性多智能系统的自适应模糊容错控制。在文献[14]中,研究了具有时变执行器故障的多智能系统的协同自适应模糊跟踪控制。
本文针对满足指定性能的带有执行器故障以及控制方向未知的非线性多智能体系统,研究其容错协同控制问题。通过使用模糊逻辑系统逼近系统内的未知非线性函数,引入特定的Nussbaum增益函数解决未知控制方向的问题。提出容错协同控制器的设计方案,用以保证所有“跟随者”的输出与“领导者”的输出同步。基于李雅普诺夫稳定性理论,证明了当系统发生故障时,本文所设计的控制器可保证系统仍能保持稳定,而且跟踪误差一致最终有界。
本文共分为4部分:第1部分主要介绍预备知识,并对所研究的多智能系统控制问题进行描述;第2部分给出容错控制器的设计方案,并进行稳定性分析;第3部分给出仿真结果,从而进一步证明所提出的控制方案的有效性;第4部分给出本文结论。
1 预备知识和问题描述
1.1 图论
通常用有向图描述多智能系统的信息通信。考虑由N个“跟随者”和1个“领导者”组成的多智能体系统,“跟随者”之间的信息通信可以由有向图ζ=(ν,μ,Λ)表示。其中ν={n1,…,ni}是节点集合,ni表示“跟随者”i;μ={ni×nj∈ν×ν}是边集合,Λ=[aij]∈RN×N是邻接矩阵;(ni,nj)∈μ表示“跟随者”j能够直接获得“跟随者”i的信息;aij定义如下:
节点i的邻接集合定义为Ni={j|(ni,nj)∈μ}。
有向图ζ的拉普拉斯矩阵L=[Lij]∈RN×N定义如下:
拉普拉斯矩阵L=D-Λ,其中D=diag{d1,…,dN}。
如果有向图ζ的每一个节点到其他任意节点都存在有向路径,则称图ζ是强连通的。如果有向图ζ至少存在一个根节点(根节点到其他任意节点都存在有向路径),则称图ζ包含有向生成树。如果任意的(ni,nj)∈μ且(nj,ni)∈μ,则称有向图ζ是双向图或无向图。显然,无向图是一类特殊的有向图,无向图中强连通和包含有向生成树是等价的,此时无向图是连通的。
定义“领导者”邻接矩阵Λ0=diag(a10,…,aN0),其中ai0=1当且仅当“跟随者”i能够获得“领导者”的信息;否则ai0=0,通常为了分析方便,定义H=L+Λ0。
假设1[7]:有向图ζ中包含有向生成树,并且根节点能够获得“领导者”的信息。
引理1[7]:若有向图ζ中包含有向生成树,并且根节点能够获得“领导者”的信息,则矩阵H的所有特征值具有正实部。
1.2 指定性能
通过确保每个误差面si,1(i=1,…,N)严格地在规定区间内来保证其有指定的性能:
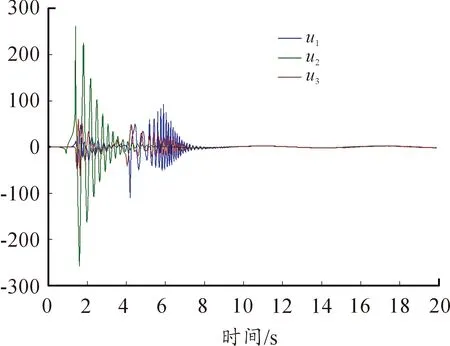
-κ1iηi(t) (1) ηi(t)=(ηi0(t)-ηi∞(t))e-qit+ηi∞(t), ∀t≥0 其中qi>0,ηi0(t)>0,ηi∞(t)>0是常数,ηi0(t)>ηi(t),q∞·ηi0被选择为-κ1iηi(0) 引理2[12]:ηi∞(t)表示si,1在区间内所规定的最大值。qi表示si,1的收敛速度。si,1的最大变化区间小于[-κ1iηi(0),κ2iηi(0)]。因此,选择适当的性能函数ηi(t)以及常数κ1i,κ2i,当初始条件满足规定的性能边界时,误差变换函数的表达式为: (2) 考虑由N个“跟随者”和1个“领导者”组成的不确定非线性多智能体系统。第i个“跟随者”的动态模型如下: (3) 本文所考虑的执行器故障为增益和偏差故障,分别定义故障模型如下: 偏差故障模型: (4) 其中ωi(t)是有界信号(有界函数)。 增益故障模型: (5) 其中hi是未知的失效率并且0≤hi≤1。 将式(4)(5)联立,系统的输入向量可表示为: (6) 控制目标:对于带有执行器故障和未知控制方向的非线性多智能系统,设计一个自适应模糊容错控制方案,保证“跟随者”的输出最终能够跟踪“领导者”的输出,且同步误差始终在指定界内。 为了设计出所需的模糊控制方案,需要以下的引理和假设。 通过使用万能逼近定理,未知非线性函数fi,k(·)(k=2,…,ni)可以通过FLS近似为: (7) (8) 为了解决控制方向未知的问题,引入了Nussbaum增益技术。定义Nussbaum函数N(ϑ)具有以下属性: 常用的Nussbaum增益函数包括: ϑ2cos(ϑ),ϑ2sin(ϑ)和exp(ϑ)2cos(ϑ)2 在本文中,选取exp(ϑ)2cos(ϑ)2。 引理3[15]:对于非线性多智能体系统(1),定义N(ϑ)=exp(ϑ)2cos(ϑ)2以及在 [0,tf)上是平滑函数的ϑi(t)。如果存在正定径向无界函数v(t,x)以及正常数C和D,则满足以下不等式: (9) 令 χi=xi/βi=[xi,1/βi,xi,2/βi,…,xi,ni/βi]T= [χi,1,…,χi,ni] 这样改写为与原系统相等的如下系统: (10) 在本节中,通过将返步递推方法和动态面技术结合,设计出所需的容错控制器。 控制器的设计过程共有ni步,并且每一步的设计都基于误差面,从第1步到第ni-1步,设计虚拟控制器αi,k+1(k=1,…,ni-1)保证系统每一步的稳定性,并且在最后一步中设计所需的实际控制器ui。定义误差面si,k和滤波误差zi,k如下: (11) 第1步: 根据式(11)可将误差面改写如下: (12) 根据式(12)和χi,k=si,k+zi,k+αi,k,同步误差i,1对时间的导数如下: (13) 其中fi,k(·),k=(1,…,ni)是一个未知函数。 通过使用模糊逻辑系统对未知函数逼近可得: (14) 将式(14)代入式(13)得到: (15) 考虑李雅普诺夫函数如下: (16) 其中:γ1i,1>0;γ2i,1>0是设计参数。 结合式(15)和(16),对v1求导,得到: (17) 定义: 利用Young不等式,可得: (18) 将式(18)代入式(17),得到: (19) (20) (21) (22) (23) 其中ci,1>0;σi,1>0;δj,1>0是设计参数。 将式(20)~(23)代入式(19)得到: (di+ai0)ρiβii,1(si,2+zi,2)}+ (24) (25) 第1个虚拟控制器(20)包含了与他相邻的智能体的状态信息模糊逻辑系统的信息。如果使用返步递推设计方法,随着系统阶数和多智能体个数的增加,“复杂性爆炸”这一问题将变得更加严重。因此,采用动态面的设计方法,让虚拟控制函数(20)通过一阶滤波器(25),避免对其求导,简化设计方案。 第k步(2≤k≤ni-1):根据式(10)得到: (26) 将式(26)代入si,k的导数,并且联立χi,k+1=si,k+1+zi,k+1+αi,k+1,得到: (27) 考虑李雅普诺夫函数如下: (28) 对式(28)求时间导数并联立式(25)和(27),可得: si,k[βi(si,k+1+zi,k+1+αi,k+1)+ (29) (30) (31) (32) 第ni步:由式(10)可得: (33) 考虑李雅普诺夫函数如下: (34) 对式(34)求时间导数并联立式(32)和(33),可得: (35) (36) (37) 其中γ1i,ni,σi,ni是设计参数。 标注1值得注意的是:上述设计参数只是保证控制系统稳定性的充分条件,通过增大设计参数γ1i,ni和ci,ni,或者减小设计参数σi,ni,可以使跟踪误差尽可能小。 将式(36)(37)代入式(35),可得: (38) 主要结果由以下定理说明: 定理1:对于多智能体系统(3)在考虑其存在执行器故障,控制方向未知等问题的情况下,设计虚拟控制函数(20)(30),参数自适应律(22)(23)(31)(37),一阶滤波器(25)(32)。在满足假设1和引理3的条件下,所有“跟随者”的输出能够跟踪“领导者”的输出,且同步误差始终在指定界内。 证明:为了对多智能体系统(3)进行稳定性分析,选取李雅普诺夫函数如下: (39) 其中zi,k+1的导数可以表示为: (40) 其中: (41) Bi,k+1(·)=Bi,k+1(si,1,…,si,k+1,zi,2,…,zi,k+1, (42) 将式(41)和式(42)代入Vk的时间导数,利用Young不等式: 可得: (43) 定义: 其中:B0>0;P>0;∏和∏i,k是在R3和Rdim∏i,k上的紧集,dim(∏i,k)是∏i,k的维数且∏×∏i,k也是紧集。这样可以得到|Bi,k+1|在∏×∏i,k上有一个最大值Bi,k+1M。 选择设计参数如下: 定义 (44) (45) 其中,i=1,…,N,k=1,…,ni,h=2,…,ni,j∈Ni。则由式(40)得到: (46) 因此,可将上式改写为: (47) 在此部分,给出数值仿真算例验证所提方法的有效性。 考虑下面的二阶非线性多智能体系统: (48) ηi(t)=2.75exp(-0.5t)+0.05。 选择模糊隶属函数为: 智能体之间的通信由图1描述: 图1 通信网络图 仿真如图2~5所示。其中,图 2表示“跟随者”的输出yi和“领导者”的输出yr(i=1,2,3)的轨迹;图 3表示控制输入ui(i=1,2,3)的轨迹;图 4表示同步误差i,1(i=1,2,3)在指定性能下的轨迹;图5表示误差面si,2(i=1,2,3)的轨迹。由仿真结果可以看出,在系统存在未知控制方向且执行器发生故障的情况下,文中提出的控制算法仍能实现系统的一致性控制。 图2 “跟随者”的输出yi和“领导者”的输出yr的轨迹 图3 控制输入ui的轨迹 图4 同步误差i,1的轨迹 图5 误差si,2的轨迹 本文针对有向图下的具有未知控制方向和执行器故障的多智能体系统,提出了一种容错控制方案。引入特定的Nussbaum增益函数解决未知控制方向的问题。结合模糊逼近和动态面控制技术,开发分布式容错控制方案用以保证所有跟随者的输出与具有指定性能的领导者的输出同步。最后,通过仿真结果验证了所提出的控制方法的有效性。
1.3 问题描述







2 容错控制器设计和稳定性分析
2.1 容错控制器的设计






















2.2 容错控制器的稳定性分析







3 仿真结果







4 结束语
猜你喜欢
山西大学学报(自然科学版)(2021年4期)2021-08-31云南民族大学学报(自然科学版)(2021年3期)2021-06-24中国广播(2017年9期)2017-09-30
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”当代贵州(2017年24期)2017-06-15诗潮(2017年5期)2017-06-01服装学报(2016年5期)2016-03-06中北大学学报(自然科学版)(2015年6期)2015-12-02中北大学学报(自然科学版)(2015年5期)2015-12-02中南财经政法大学学报(2015年5期)2015-04-07汽车零部件(2014年1期)2014-09-21
