敌我识别目标航迹处理技术研究
2019-07-22 01:08李永祥倪世道
舰船电子对抗 2019年3期
李永祥,倪世道
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
0 引 言
敌我识别(IFF)系统是自动目标识别技术的重要应用之一,广泛安装于军用飞机、舰艇,用于识别目标敌我属性。敌我识别信号是指敌我识别系统发出的询问、应答信号,以自动鉴别目标身份属性。
敌我识别系统主要分为Mark体制和“口令”体制2类,工作机理基本一致,即:雷达IFF询问机向目标发出一组包含信息的脉冲,目标收到后解析脉冲组含义,IFF应答机发出相应的应答脉冲组,IFF询问机从目标的应答脉冲中提取信息,判别敌我。
本文主要针对Mark体制的敌我识别信号展开讨论。Mark体制的敌我识别信号的工作模式如表1所示[1]。

表1 工作模式
Mark体制敌我识别信号工作模式中,对3/A模式的信号码值能唯一标识信号目标身份,C模式信号码值携带该信号目标的当前高度,而模式1、2、4、5(以下简称“其它模式”)的信号采用军用加密模式进行传输。
基于敌我识别信号对目标进行识别,可以采取协作式与非协作式2类[2]:
(1) 协作式敌我识别中,由询问机发出无线电询问信号,目标应答机接收询问信号,判断问询信号的正确性,并给询问机发送所请求的应答信号,询问机对应答信号进行解码,识别目标的敌我属性。
(2) 非协作式敌我识别,是将被识别目标看作系统的外部环境,利用传感器侦测敌我识别信号,对目标的结构特征(目标二维投影的长度、宽度、周长和面积等)、统计特征(均值和均方偏差等)、空间特征(方向、位置、速度和距离等) 和辐射参数信号特征进行观测,通过特定的算法,依靠系统处理器对数据进行相关分类、特征匹配等综合分析来确定目标的敌我属性。其工作原理图如图1所示。

图1 非协作式敌我识别
1 敌我识别目标航迹处理
电子侦察装备对敌我目标信号进行识别的过程采用非协作敌我识别方式。基于前端敌我识别信号侦测传感器,连续侦听目标空域,利用敌我识别信号对目标位置进行连续识别,最终形成目标的运动轨迹,即目标航迹,是电子侦察装备进行敌我识别的主要方式之一。
敌我识别信号不携带位置信息(除了C模式码值为目标的高度信息),无法直接用于目标航迹处理,但是采用分布部署的多个传感器侦测同一信号,运用基于Chan氏和Taylor级数展开的协同定位算法[3],能够计算出信号发送时刻目标的定位信息。同一敌我识别信号经过多站协同侦测、信号比对与分选、信号比幅测向等信号处理过程后,形成同一信号的多个侦测信号;对多个侦测信号运用协同定位算法,形成信号发送时刻目标的定位信息。基于目标信号的定位信息可以完成后续的航迹起始、点航关联、航迹滤波等处理过程,形成目标的航迹数据库。
敌我识别目标航迹处理过程如图2所示。

图2 敌我识别目标航迹处理
但是,由于敌我识别目标会发射不同工作模式的信号,而且群目标会以多种模式交替工作,会造成信号点迹携带的信号匹配特性不一致,目标位置信号的精度和数据率不稳定,直接使用该点迹进行航迹处理会导致目标航迹的起始、关联都出现错误,容易造成断批、混批等问题。
就敌我识别信号的航迹处理来说,其具有定位数据率高的特点,每秒15个以上的定位点码字(不同模式)并不完全相同,在定位精度一定的情况下,要实现目标航迹起始、关联、保持、消失、编批等,首先要解决的问题是要判断这些定位数据是来自同一目标还是不同目标。
因此,在进行航迹处理之前,基于点迹属性信息对目标点迹进行预处理,尽量将同一采样周期中属于同一目标的点迹信息进行归类、凝聚,能够极大地提高航迹处理的效率及精确性,降低断批、混批等问题的发生。
2 点迹处理
2.1 点迹属性
由多个传感器对同一敌我识别信号进行侦测得到的多个信号采用协同定位算法[3]能够得到目标点迹信息,作为航迹处理的输入。目标点迹以下属性可能用于后续的航迹处理:
(1) 模式信息:该点迹是对应的原始敌我识别信号的工作模式,包括1、2、3/A,C,4,5等几种。需要强调的是,信号分选过程无法将3/A模式与C模式的敌我识别信号区分开,因此3/A模式与C模式的点迹无法直接区分其模式。
(2) 定位信息:通过多站协同时差定位算法计算得到的在信号发送时刻的目标点迹位置信息。
(3) 码值信息:对于3/A模式及C模式点迹,对应的原始敌我识别信号的码值信息具有明确的意义,即3/A模式码值唯一标识目标身份,C模式码值标识目标高度信息。
(4) 航速航向信息:目标点迹的航速航向信息用于航迹处理过程中的外推过程。
为了最大程度地利用点迹模式及码值信息,提高处理精度及效率,需要区分3/A模式点迹与C模式点迹,并尽可能地将其它模式点迹与A模式点迹关联。针对敌我识别信号发射周期不固定的特点,点迹处理过程按照固定的采样周期进行。该采样周期大小可以根据数据率及精确度要求进行调整。点迹处理流程涉及到的关键步骤是:
(1) 点迹预处理:区分同一采样周期中3/A模式点迹与C模式点迹;
(2) 综合隶属度计算:计算C码点迹及其它模式点迹的综合隶属度,指导后期的点迹凝聚;
(3) 目标点迹凝聚:将一个采样周期中的点迹,按照综合隶属度形成以A码点迹及其它点迹的集合,然后对这些点迹集合分别进行凝聚,形成多个目标点迹,用于后面的航迹起始、关联等过程。
2.2 A/C码点区分
A码值表示目标的身份,对于同一目标,A码值保持不变,而C码值表示目标的高度,会发生变化。在目标航迹处理时这2类信息可以作为航迹起始及凝聚很重要的依据。但是由于A码与C码在信号解码及信息解译时无法区别,因此在航迹处理之前必须首先区分A码点与C码点。A/C码点区分采用以下过程:
(1) 设定1个时间窗口,宽度为3个采样周期;从第1个采样周期开始,取3个采样周期内所有A/C码点;
(2) 比较时间窗口内所有A/C码点,如果存在多个点的码值相同,则这些码点为A码点迹,其它点迹待定;
(3) 设定时间窗口内第1个采样周期中未标记的点为C点;
(4) 将时间窗口向后移动1个采样周期,取窗口内最后一个采样周期中的A/C码点,如果存在与前2个周期中的点码值相同,则这些点都标记为A码点,其它点待定。
(5) 重复过程(3)与(4),直到停止或后续无信号采样。将所有未标记点记为C点。
A/C码区分过程如所图3所示。

图3 A/C码点区分过程
通过上述过程,能够将每个扫描周期中的A码点与C码点区分开来,A码点可以直接用于航迹起始,C码点需要(与其它模式的点迹一样)计算综合隶属度。
2.3 综合隶属度计算
综合隶属度(MS)是一个采样周期中C码点迹或其它模式码点迹的属性,表征了该点与同一采样周期内某个A码点或某个稳定航迹是属于同一个目标的可能性。
A码点迹与一条稳定航迹相对应,而且在一个采样周期内可能没有A码点迹。对每个C码点或其它模式码点都有综合隶属度与每个稳定航迹对应。
与综合隶属度的计算有关的码点属性及其影响权值为:码点的距离信息(w1);码点高度信息(w2,C码的高度值取码值);码点航速(w3);码点航向(w4);码点测向值(w5)。
以下给出了综合隶属度MS的计算过程:
(1) 取当前采样周期T中的每个码点P;
(2) 对每一条稳定航迹i,其上一采样周期航迹点为D;
(3) 按照以下公式计算MP[i]:
(1)
式中:V1为P点相对D点的距离偏差率;V2为P点相对D点的高度偏差率;V3为P点相对D点的航速偏差率;V4为P点相对D点的航向偏差率;V5为P点相对D点的测向偏差率。
(4) 计算出P点针对每个航迹i的MP[i]值后,对MP数组归一化处理;
(5) 取MP[i]=1-MP[i];
(6) 对于3/A码点,如果其与已有航迹i的关键值相同,则其M[i]取100%,其它分量置0;
在计算综合隶属度时采用的各类因素的影响权值根据前端设备进行调整。综合隶属度从一定程度上表征了其它模式点属于某个稳定航迹在当前采样周期内的侦测点的可能性,综合隶属度越高,该模式点迹属于航迹目标的概率越大。
2.4 点迹凝聚
点迹凝聚按与点迹预处理相同的采样周期进行,每个采样周期完成点处理后,根据点迹的综合隶属度,可以将每个采样周期的点迹分成3类点迹群,如图4所示。
(1) A码点迹群:每个A码点迹及对该A码点(或相对应的航迹)的综合隶属度大于门限的其它模式点构成一个A码点迹群;
(2) 混合模式点迹群:对某个航迹的综合隶属度都大于门限的所有其它模式点迹构成一个混合模式点迹群;
(3) 其它点迹群:由不属于A码点迹群及混合点迹群的点迹构成。
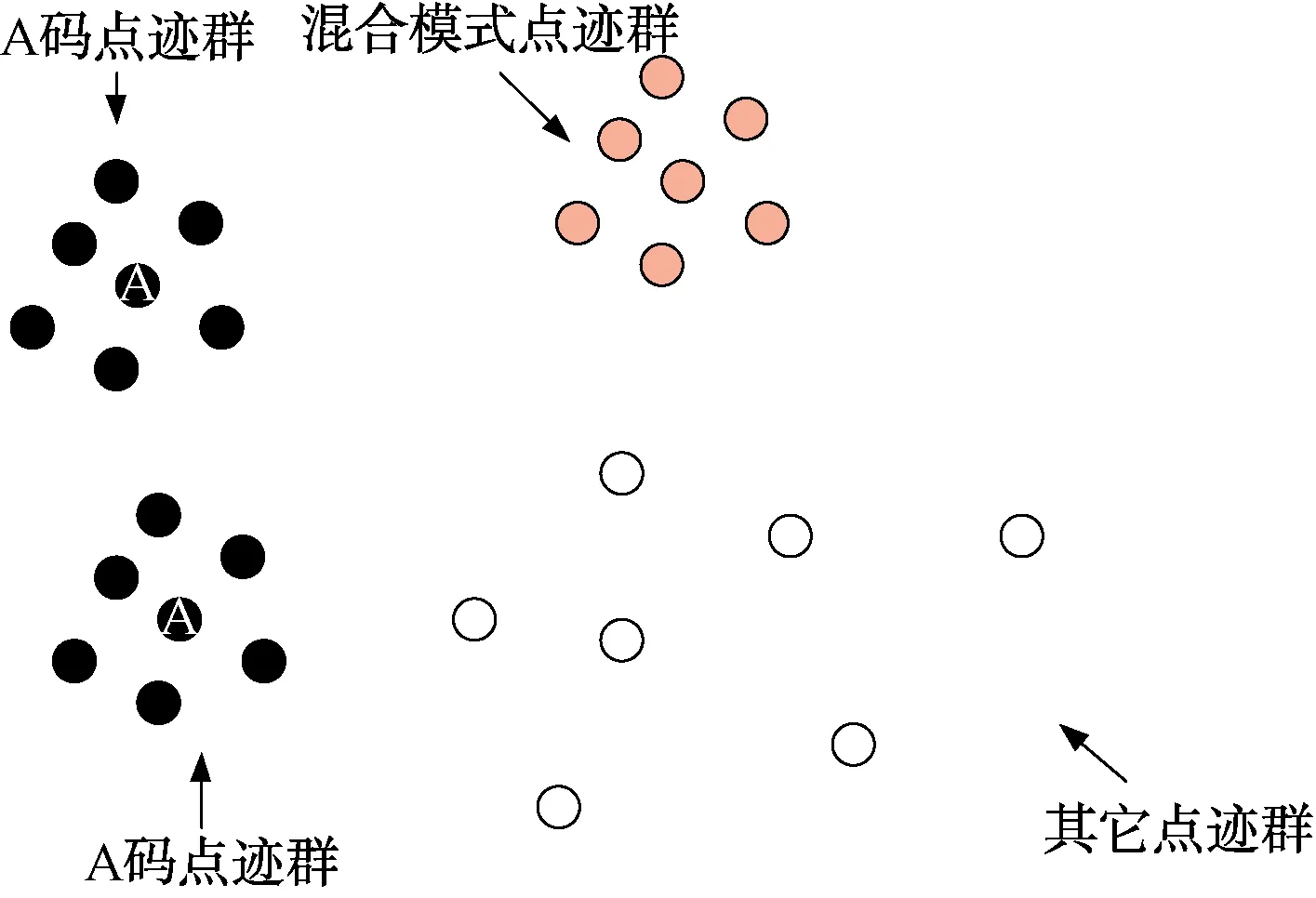
图4 采样周期内的点迹分类
每个A码点迹群或混合模式点迹群中的点迹,分别属于同一个敌我识别目标,因此可以将每个A码点迹群或混合模式点迹群单独进行凝聚,形成该采样周期内某个目标对应的航迹点,称为确定点迹。
如果将A码点看成是综合隶属度为100%的码点,则A码点迹群与混合模式点迹群都可以采用基于综合隶属度的质量中心算法进行凝聚,即:
(2)
式中:Bz为点迹群凝聚后的点迹定位信息;Bi为点迹群中第i个点迹的定位信息;MBi为点迹群中第i个点迹针对当前A码点或航迹关键码值的综合隶属度。
其它点迹群中的点迹不做凝聚,直接进行后续的起始与关联。
3 航迹起始与关联
经过点迹凝聚后,目标点迹分成2类:与目标关联的确定点迹;未进行凝聚的其它点迹群中的点迹,简称其它点迹。
敌我识别信号目标航迹起始与关联采用“穷举法暂时航迹全自动相关”准则,把连续2个采样周期间能配对的点迹全部形成暂时航迹。
在暂时航迹建立时,如果下一采样周期已经存在与稳定航迹相对应的确定点迹,则已经建立的暂时航迹不再向下一采样周期延伸;如果连续2个采样周期都是确定点迹关联,则该暂时航迹为稳定航迹,否则按照以下步骤进行:
(1) 计算稳定航迹的3个门限:距离相关门限,航速相关门限,航向相关门限[4];
(2) 每个点迹在附近找下一采样周期其它点迹配对形成暂时航迹;
(3) 穷举门限内所有暂时航迹对,到第3个采样周期,再根据距离变化稳定性查找第3个采样周期暂时航迹相关其它点迹;
(4) 继续(3),直到找到相应的确定点迹或暂时航迹已经向前查找了5个采样周期;
(5) 计算每个暂时航迹的2个采样周期之间的距离、航速及航向,如果都在置信度高的相关门限内,则该暂时航迹为第(2)步所关联的其它模式点迹与相应的稳定航迹关联。
点迹多航迹假设相关过程如图5所示。

图5 点迹多航迹假设相关
图5中的每种连线都是一条暂时航迹,每个点都和上一采样周期距离接近的点连接成暂时航迹,对于图5中B、C、D 3种情况,只有粗实连线的暂时航迹满足距离变化率稳定且偏差最小,形成稳定航迹。理论上穷举个数越多越好,但受计算机缓区大小和计算能力限制,目前的技术条件下,建议穷举个数不超过5个采样周期。
将本文提出的敌我识别目标航迹处理技术应用于某型敌我识别侦察定位装备,对多批次目标(其中2架编队飞行)的飞机进行多站协同侦测、跟踪定位并航迹处理,能够形成稳定的目标航迹,如图6所示,表明该技术能够明显提高航迹处理的效率及精确性,解决航迹处理中的断批、混批等问题的发生。
4 结束语
针对敌我识别目标航迹处理过程中可能出现的断批、合批问题,本文在分析敌我识别信号工作模式的基础上,首先对敌我识别目标点迹进行预处理,区分采样周期内点迹中的3/A与C模式点,并针对其它模式点迹计算与每条稳定航迹相对应的综合隶属度,以此为基础进行点迹凝聚与航迹的起始与关联。
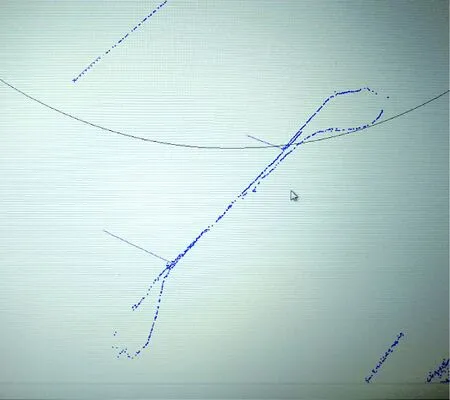
图6 敌我识别目标航迹处理结果
在后续研究中,还需要从以下2个方面深入:
(1) 综合隶属度的计算维度:本文中综合隶属度的计算采取的依据包括点迹的航速航向、距离及高度等,而且假设每个维度对综合隶属度的影响是均衡的。后续研究将在此基础上,对各维度进行细分,区分不同维度的影响程度,使综合隶属度更贴近实际情况。
(2) 敌我识别信号特征的应用:不同目标的敌我识别信号具有各自的细微特征,在航迹处理过程中如果引入这些特征,可能提高点航相关的精确度,提升航迹质量。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
考试与评价·高一版(2020年6期)2020-11-02
雷达科学与技术(2020年4期)2020-09-11
读者·校园版(2016年14期)2016-07-07
环球时报(2010-02-11)2010-02-11
中学英语之友·上(2008年2期)2008-04-01
中学英语之友·上(2008年2期)2008-04-01
中学英语之友·上(2008年1期)2008-03-20