
电磁轨道发射中内弹道动力响应特性分析*
2019-07-29 01:52张永胜鲁军勇姜远志
国防科技大学学报 2019年4期
张永胜,鲁军勇,谭 赛,吴 海,李 白,姜远志
(海军工程大学 舰船综合电力技术国防科技重点实验室, 湖北 武汉 430033)
电磁轨道发射器是利用洛伦兹力将一体化弹丸加速至超高速度的特殊机电能量转换装置[1]。电磁轨道发射器相较于传统化学能火炮具有弹丸初速高、响应快、射程远、可控性好等优势,但弹丸的超高初速也给发射器提出了严峻考验。电磁轨道发射器中存在复杂的电磁-温度-结构-运动的多物理场强耦合现象。弹丸发射器耦合下的内弹道安全性发射是电磁轨道发射技术的重要研究内容。分析发射过程中内弹道的动力响应特性是分析轨道受力特性和失效机理以及一体化弹丸内弹道发射性能的前提条件。
针对电磁轨道发射器中内弹道动力响应特性问题,国内外学者已经做了大量工作。Knoth等[2]建立了电枢臂的一维弹簧-阻尼系统模型,分析了轨道表面粗糙度、身管直线度和电枢臂材料刚度对电枢轨道间动态接触力的影响;Hopkins等[3]利用有限元代码EMAP3D/DYNA3D建立电磁-结构-运动的耦合场模型,分析了电枢运动起始段的枢轨接触压力;Tzeng[4]将电磁轨道发射器中的轨道简化为移动载荷作用下固定在弹性支撑上的Bernoulli-Euler梁,得到其动力学响应解析结果,还对轨道发射器的重要几何设计参数以及轨道材料性能进行参数灵敏度研究,结论是高弹性模量和低密度的组合、轨道截面惯性矩和封装支撑刚度的提高都有利于提高临界速度[5-6];Johnson等[7]基于弹性应力波研究了枢轨接触压力随电枢速度的变化关系,发现电枢速度在临界速度附近时枢轨接触压力会显著增加;Johnson等[8-9]还基于光纤光栅应变传感器搭建了轨道应变测量系统,观测到应力波辐射、应力波反射和临界速度下轨道应力急剧增大等现象,但其两根轨道上的测量点仅有4个,没有也无法深入完整地研究轨道应力载荷的空间分布特性和内弹道动力响应特性;Lewis等[10-11]研究了临界速度对轨道振动的影响,通过有限元模型计算发现增加轨道间的阻尼可以有效减小因动态响应引起的轨道变形量;田振国等[12-13]在Bernoulli-Euler梁模型基础上得到轨道振动的控制方程,通过分离变量法和Fourier变换得到轨道挠度的表达式;Che等[14]研究了不同封装刚度和预紧力对轨道振动特性的影响;Cao等[15]建立了考虑电枢受热膨胀的内弹道动力学模型,利用激光振动计测量了单个位置轨道振动,发现轨道间的相互排斥力会增大电枢通过后轨道区域的位移量;Hoffman等[16]对比了Brillouin散射和光纤光栅应变传感器测量的轨道应变情况,发现光纤光栅应变传感器可以较好地反映轨道应变的实时变化。
这些工作都没有完整地给出轨道在动态发射过程中的应力载荷空间分布特性和结合试验数据对电枢在内弹道的稳定性分析。本文采用混合有限元-边界元法建立了电磁轨道发射器电磁-结构-运动多物理场耦合动力计算模型,求得发射过程中枢轨间动态接触压力和轨道的应力应变分布特性。
1 内弹道动力学模型
电磁轨道发射器的身管截面如图1所示,其中,hb为内膛的高度,wb为内膛的宽度,hr为轨道的高度,wr为轨道的宽度,ha为C型电枢的高度。

图1 电磁轨道发射器截面Fig.1 Cross section of the EM rail launcher
电磁轨道发射器的电磁场控制方程的统一形式可写为:
×A)=0
(1)
(2)

(3)
式中:M为质量矩阵;u为位移;C为阻尼矩阵;K为刚度矩阵;F(t)是由电磁场求解得到的载荷力。
F=J×B
(4)
式中:J为电流密度,表示为:
(5)
B为磁感应强度,表示为:
B=×A
(6)
电磁轨道发射器中轨道可以简化为移动载荷作用下固定在弹性支撑上的Bernoulli-Euler梁[4],其模型如图2所示。假定电枢以某一速度在轨道上运动,轨道的动力学控制方程[4,12]为:
(7)

图2 电磁轨道发射器的Bernoulli-Euler梁动力学模型Fig.2 Bernoulli-Euler beam dynamical model of the EM rail launcher

F(x,t)=q(x,t)[1-H(x-vt)]+f(x,t)δ(x-vt)
(8)
式中:q(x,t)为轨道间的电磁排斥力;f(x,t)为加载在轨道上的电枢挤压力;H为海维赛德函数;δ为狄拉克函数。
Bernoulli-Euler梁的临界速度表示电枢运动能够激发在传播过程中不会衰减的应力波的最小速度[4,9],其可以计算为:
(9)
轨道中的应力波主要是横波,其在轨道中的传播速度可以计算为:
(10)
式中:γ为轨道材料的泊松比。应力波在轨道中传播遇到端面会发生反射现象。当电枢运动激发的应力波与从端面反射回来的应力波频率接近时,会引起共振,导致轨道应力集中急剧增大。
2 临界速度计算
将搭建的30 mm×30 mm电磁轨道发射器为研究对象,计算用的具体参数见表1。当电枢的质量为70 g时,电枢的速度和位移随梯形驱动脉冲电流变化的关系如图3所示。其中,驱动脉冲电流的峰值为420 kA,整个发射时长为4.1 ms,电枢的出口速度为1251 m/s,发射位移为2.57 m。
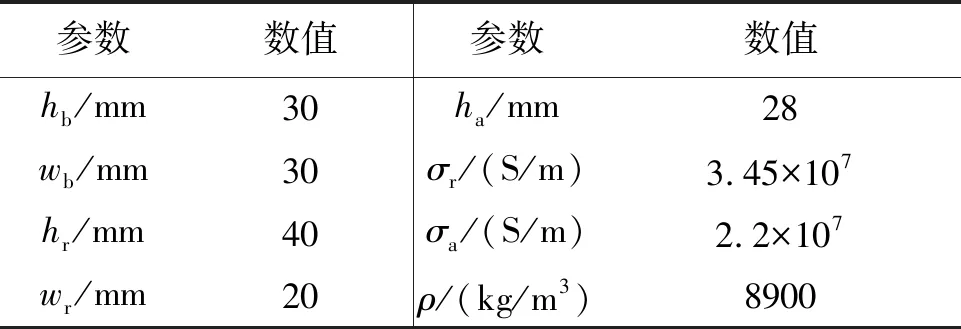
表1 计算用参数

图3 电枢速度和位移随驱动脉冲电流的变化Fig.3 Variation of armature velocity and displacement with driving pulse current waveform
电磁轨道发射器的轨道材料为铜合金,其弹性模量E为120 GPa,轨道截面惯性矩I为2.67×10-8m4,轨道线密度m为7.12 kg/m。轨道外围封装由G10绝缘支撑材料和钢压板组成。利用ANSYS的Maxwell 3D+Static Structural建立了静态电磁-结构耦合有限元计算模型,得到轨道间排斥力的载荷为1.05 MN/m,相应的轨道位移为0.24 mm。故求得轨道外围封装的等效弹性刚度为4.37 GPa。将各参数代入式(9),计算得到临界速度为1003.2 m/s。
3 数值模拟结果
LS-DYNA在v980及其以后版本增加了电磁场计算模块,使得其能够计算电磁轨道发射器考虑电枢运动的多物理场耦合问题[17]。利用建立的静态下电磁-结构耦合计算模型,求得电枢臂受到的电磁排斥力和枢轨接触压力随时间的变化,如图4所示。得到在电流平顶沿阶段,电枢臂中电流趋肤深度不断增加。电流密度由电枢表面向内部扩散,导致电枢臂受到的电磁排斥力及其引起的枢轨接触压力呈减小趋势。典型时刻电枢臂受到的电磁排斥力密度分布如图5所示。
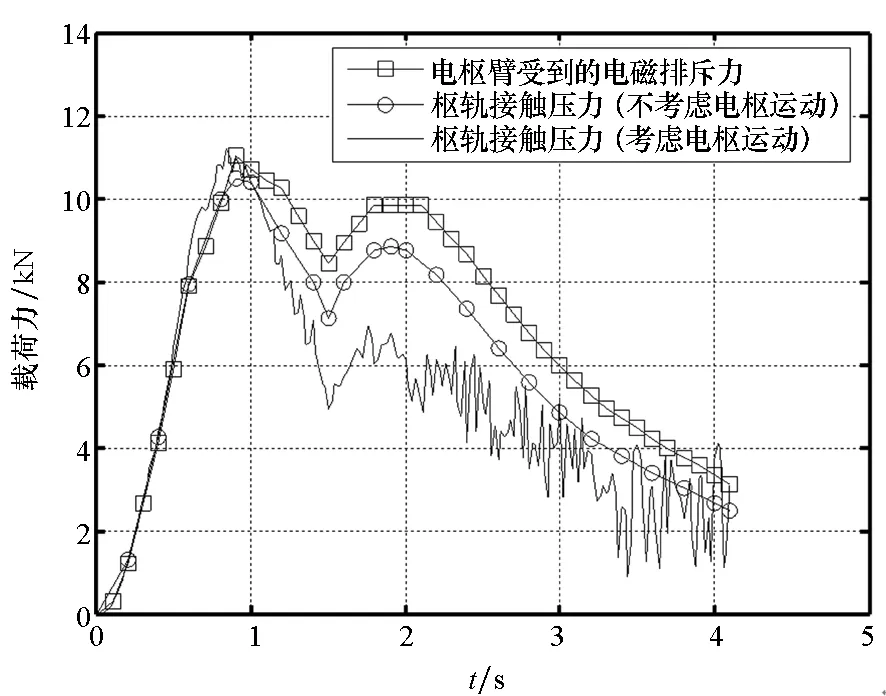
图4 枢轨接触压力随时间的变化Fig.4 Variation of the contact force between the armature and the rail with time

(a) 上升沿结束(a) End of rising edge
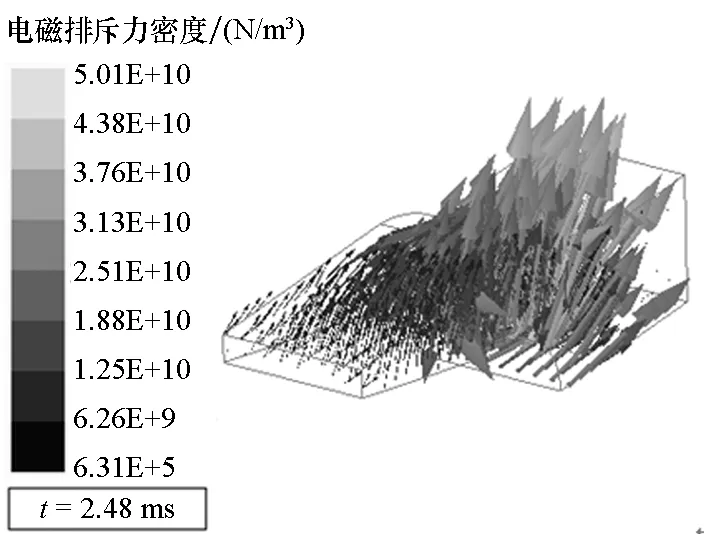
(b) 平顶沿结束(b) End of flat top图5 不同时刻电枢臂受到的电磁排斥力密度分布Fig.5 Distribution of electromagnetic repulsive force density of armature arm at different time
另外,利用LS-DYNA建立了考虑电枢运动的电磁-结构-运动多物理场耦合计算模型,得到动态发射过程中枢轨接触压力随时间的变化趋势。在脉冲电流平顶沿阶段,枢轨接触压力随时间推移而不断减小;但达到临界速度后,枢轨接触压力又会略有增大,即电枢臂受到的电磁排斥力和电枢速度均会影响枢轨接触压力的变化。考虑电枢运动与否的枢轨接触压力随时间的变化趋势对比亦如图4所示。两种情况得到的枢轨接触压力均在上升沿结束时刻达到最大值,两者间偏差仅为6.52%。而且考虑电枢运动的情况下得到的枢轨接触压力随时间推移而下降的趋势更为显著。
电磁-结构-运动耦合计算模型得到的轨道背面中心线上各个位置垂向位移随时间的变化如图6所示。其中,发射行程内轨道中各个位置均在电枢通过时垂向位移达到最大值,轨道的最大垂向位移为0.32 mm。轨道背部中心线等间距离散分布的41个位置的轴向应变和等效应力随时间的变化分别如图7和图8所示。其中,轨道应力集中沿轴向主要呈双峰曲线变化形式,并且在中间高速段区域轨道应力最为集中,其最大轴向应变为566.4 μm/m,是上升沿结束时刻电枢对应轨道位置最大轴向应变296.9 μm/m的1.91倍,其最大应力81.2 MPa是上升沿结束时刻电枢对应轨道位置最大应力49.6 MPa的1.64倍。轨道高速段应力集中情况较起始低速段更为明显,这说明轨道应力集中与电枢对轨道的挤压力以及电枢速度均有关。
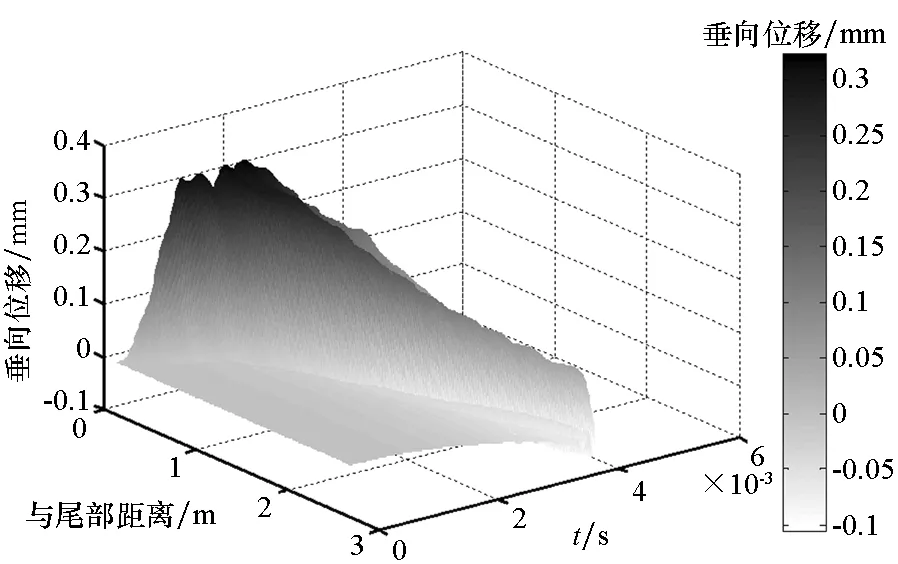
图6 轨道垂向位移的三维视图Fig.6 3D map of rail vertical displacement

图7 轨道背部中心线轴向应变仿真值Fig.7 Simulation results of axial strains of the centerline on the back of the rail

图8 轨道背部中心线等效应力仿真值Fig.8 Simulation results of equivalent stresses of the centerline on the back of the rail
4 试验结果分析
光纤光栅应变片具有电气隔离性好、体积小、连线少等优点,比较适于电磁轨道发射器的强电磁干扰和布设空间狭小的测量环境。故搭建了基于光纤光栅应变传感器的轨道应变测量系统,光纤光栅应变传感器在轨道上的布置如图9所示,其位于轨道背面中心线上,并在背面绝缘板相应位置开槽以进行安装匹配。
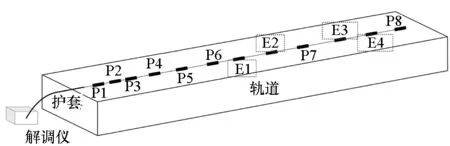
图9 光纤光栅应变传感器在轨道上的布置Fig.9 Layout of fiber grating strain sensors on the rail
光纤光栅应变传感器体积很小,其直径小于0.4 mm。光纤光栅应变传感器采用串联方式连接,即同一条光纤上有4个传感器。应变传感器量程为±4000 μm/mm,工作温度为0~100 ℃。由于应变传感器采用串联方式连接,传输损耗小,可以实现10 kHz数据测量和解算。以发射器尾部为原点,各个应变测量点的相对位置如表2所示。

表2 轨道上应变测量点相对位置
早期试验中,每根轨道布置8个应变测量点。得到的典型上、下轨道各个测量点的轴向应变随时间变化如图10和图11所示。由图中结果可以看出,P3~P5位置轴向应变存在明显的波峰波谷,且对应电枢通过过程,说明轨道位置在电枢通过时受力最为集中。P3~P5位置轴向应变不断减小也验证了枢轨接触力随时间减小的仿真结果。上、下轨道中的P3~P6点轴向应变波峰波谷出现在相同时刻,但P7和P8点轴向应变不论幅值和波峰波谷时刻均存在明显差异,说明电枢在起始低速段区域运行较为平稳,上、下轨道受力也较为对称,但在高速段区域上、下轨道受力出现明显不对称性,即电枢在膛内运动存在晃动现象。
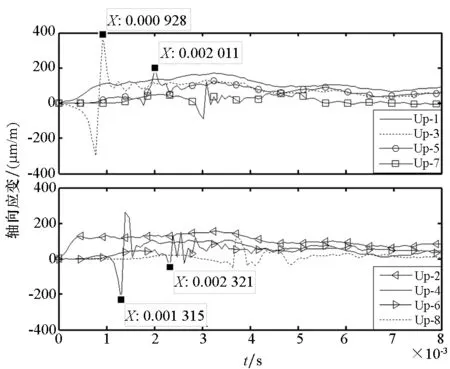
图10 上轨道测量点轴向应变随时间的变化Fig.10 Variation of the axial strains of the measuring points of the upper rail with time

图11 下轨道测量点轴向应变随时间的变化Fig.11 Variation of the axial strains of the measuring points of the lower rail with time
光纤光栅应变传感器测量系统数据采集频率仅为10 kHz,测量数据无法准确反映电枢通过的完整过程。但多次试验可以在一定程度上弥补数据采集频率较低的不足。考虑到采集频率可能存在一定的盲区,以及高速段应变测量点较少无法完整反映临近速度附近的动力响应特性,后期试验又在上、下轨道距尾部1200 mm、1400 mm、1800 mm和2100 mm分别增加了应变测量点,并进行了多次试验测量。测量得到的典型上、下轨道轴向应变随时间的变化如图12和图13 所示。
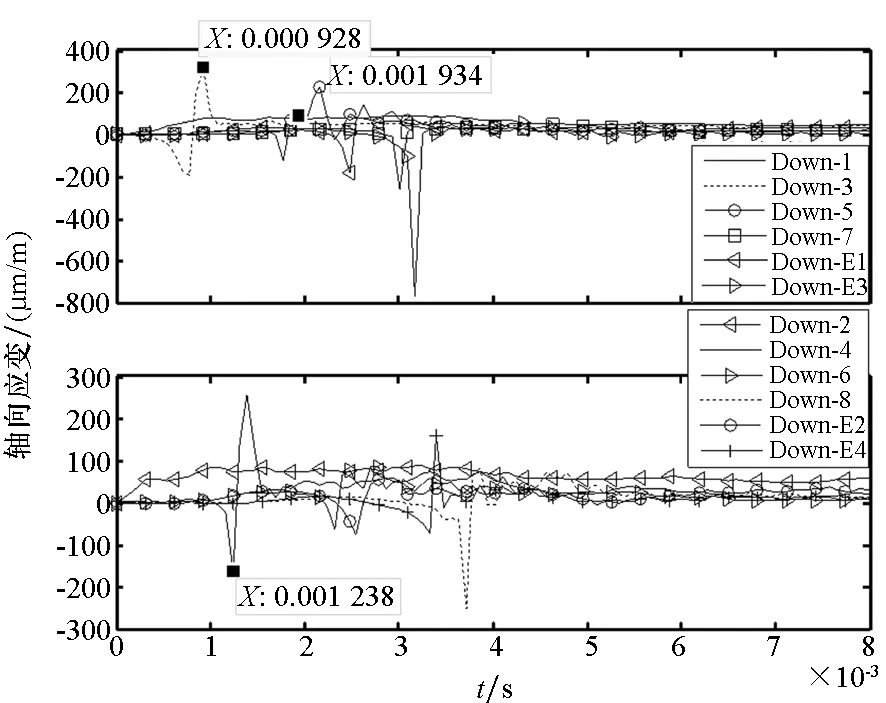
图13 增加4个测量点后下轨道轴向应变随时间的变化Fig.13 Variation of the axial strains of the lower rail with time after the addition of four measuring points
典型测量结果中下轨道E3点最大轴向应变值为765.5 μm/m,是P3点最大轴向应变值314.3 μm/m的2.44倍,说明轨道在电枢运动的中间高速段受力最为集中。出现该现象的原因是在电枢运动的中间高速段所激发的应力波与从轨道端面反射回来的应力波频率接近,发生了共振才导致轨道应力集中情况加剧。但该结果明显大于仿真结果,很可能是因为仿真模型没有考虑电枢初始装填角、质量偏心等非理想因素,才导致仿真值偏小。
5 结论
本文建立了电磁轨道发射器的电磁-结构-运动多物理场耦合动力分析模型。得出如下结论:
1)C型电枢对轨道的电磁挤压力在平顶沿起始时刻达到最大值,之后随着时间推移逐渐减小;
2)电枢在内弹道存在“低速段容易平稳运动-高速段容易晃动”的响应特性,其中电枢出现晃动时上、下轨道受力不对称;
3)轨道受到的应力载荷与C型电枢对轨道的挤压力以及电枢速度均相关,且轨道在电枢运动的中间高速段受力最为集中,其应力集中水平约是起始低速段的2.44倍,轨道应力载荷分布在轴向呈双峰曲线的变化趋势。
研究的发射器轨道在电枢运动的中间高速段受力最为集中,说明其临界速度较低的不足,表明电磁轨道发射器的临界速度关乎内弹道响应特性和轨道应力集中特性,发射器设计中应最大限度使发射器临界速度高于发射初速。此外,轨道在电枢运动的中间高速段应力集中水平试验测量值明显高于仿真值,估计主要原因是电枢初始装填角、质量偏心等非理想因素加剧了电枢在内弹道的振动响应,增大了轨道应力集中度。下一步将建立考虑非理想因素下的一体化弹丸和发射器耦合的动力学响应模型。另外,提高光纤光栅应变传感器的采样频率也是更完整精确地获取电磁轨道发射器内弹道动态响应特性的重要方向。
猜你喜欢
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
航空学报(2022年5期)2022-07-04
弹箭与制导学报(2020年1期)2020-07-09
模具制造(2019年10期)2020-01-06
弹箭与制导学报(2019年6期)2019-06-24
自动化与仪表(2019年2期)2019-03-06
数字通信世界(2019年1期)2019-02-14
兵器知识(2019年1期)2019-01-23
汽车维护与修理(2018年3期)2018-12-07
