
考虑列车能耗和舒适性的惰行间隔的计算
2019-09-02 08:14黄江平田壮壮
重庆交通大学学报(自然科学版) 2019年8期
黄江平,田壮壮
(华东交通大学 电气与自动化工程学院,江西 南昌 330013)
0 引 言
区间追踪间隔是影响列车最小追踪间隔的因素之一(笔者所述的追踪间隔是空间间隔,为间隔距离,m),它首先要有足够的长度,以保证追踪列车和前行列车的行车安全,同时,还要使得间隔距离尽可能短,以提高线路的运行效率。因此,在区间追踪间隔的建模中,要尽可能多的将各种因素考虑在内。在最小列车追踪间隔方面,汪龙才[1]建立了列车区间追踪间隔的数学模型,但是没有考虑惰行间隔。因此,在实际的运行线路中,若前行列车经过限速路段,追踪列车则需要立即由牵引转为制动,来保持最小追踪间隔距离,这不利于追踪列车的舒适和节能。鉴于此,李跃宗[2]以追踪列车的加速度为优化目标,通过求解追踪列车的最小加速度来提前干预追踪列车的运行,从而缓解前行列车对追踪列车的影响。但是,由于没有建立预干预区段的数学模型,不利于区间追踪间隔的进一步优化,会影响线路的运行效率。辛亚江[3]分析了列车区间追踪运行时,在“撞软墙”模式下追踪列车的操纵策略。由于前行列车的速度和加速度的变化,均会对追踪列车产生影响,尤其是两列车以相同的速度追踪运行时,要保持安全距离S,就要求前行列车采取制动时,追踪列车能立即采取大于或者等于减速度的制动。该模式下,势必会影响追踪列车的舒适性,增加制动能耗。许伶俐等[4]对列车运行的能耗进行了分析,认为轨道交通列车在正常运行中,制动能耗占比很大,想要降低列车的运行能耗,除了利用更多的电力制动以外,还需在其根本上进行研究,即如何减少不必要的制动。康随武[5]给出了列车运行过程中,加速度和加速度变化率的数学模型,该模型通常用来衡量列车运行的舒适度。因此。可以继续通过调整加速度来优化追踪列车的舒适性。笔者综合实际运行线路中存在的限速路段,追踪列车的制动能耗,追踪运行过程中的加速度,以加速过程中的最大牵引力、制动过程中的最大制动力以及限速路段的最大限速值为约束条件,建立了追踪列车最优惰行间隔的数学模型。通过在区间追踪间隔中加入一段供追踪列车惰行的间隔,以减少列车追踪运行中的不必要制动,从而提高追踪列车的舒适性,降低列车运行的制动能耗。
1 列车制动能耗和舒适性的分析
1.1 列车的制动能耗分析
列车在制动过程中,采取直通式电空联合制动,即先采用电力制动,待列车速度较低,电制动力不足时,再由空气制动补充。笔者所研究的速度范围为200~310 km·h-1。采用的制动方式为电力制动。在制动过程中列车的动能将被转化为电能,但是,由于再生制动所产生的电能被有效利用的效率很低,利用率不超过30%(取30%),由再生制动产生的电能大部分被消耗电阻以热能的形式浪费掉。因此,无论采用空气制动,或是再生制动,均无法真正避免制动能耗。要避免制动能耗的最佳办法,即减少不必要的制动。制动能耗[6]可由能量守恒模型进行计算,如式(1):
Eb=(1-μ)(Ev0-Evm-Ef)
(1)
式中:Eb为制动能耗,kw·h;μ为再生制动的利用率;Ev0为列车在初始速度下所具有的动能,kw·h;Evm为列车在末态速度下所具有的动能,kw·h;Ef为列车克服基本运行阻力所做的功,kw·h。
1.2 列车的舒适性分析
列车在运行过程中,影响舒适性的因素很多。其中,运行过程中速度的变化率即加速度,以及加速度的变化率即冲击度是常用的两个衡量舒适度的指标。在列车减速的过程中,为了保证列车的舒适性,减速度通常是恒定的,即冲击度为0。因此,可以选用减速度作为一个衡量舒适性的指标。减速度和冲击度的数学模型[5,7]如式(2)、式(3):
(2)
(3)
式中:F为列车受到的牵引力,N;f为列车受到的运行阻力,N;B为追踪列车所受的制动力,N;m为列车的质量,kg;r为回转质量系数;k为冲击度,一般小于0.75 m·s-3。
2 惰行间隔距离的数学模型建立
2.1 列车的牵引运行控制策略
将前行列车通过限速路段过程分为两个不同阶段。列车的牵引运行控制策略采用Bang-Bang控制原理[8],即在限速路段之前的一定距离处,列车卸载牵引力转为惰行,且在整个惰行过程中,不施加制动力,避免制动能耗;而通过限速路段时,列车在最大允许速度下运行,减少在限速路段的运行时间,缩短区间追踪间隔距离,提高整条线路的运行效率[9]。牵引运行策略如图1。
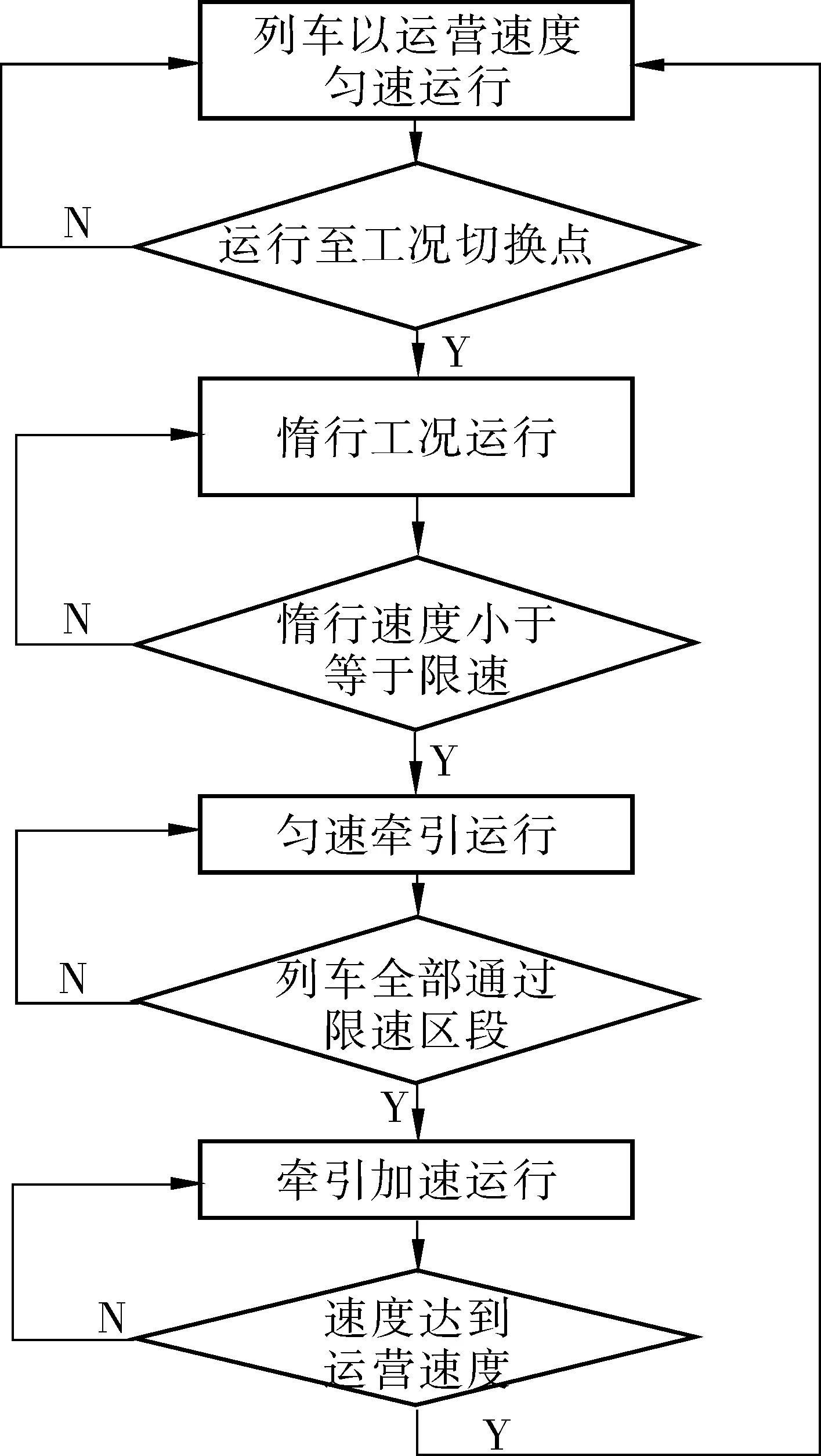
图1 列车牵引策略流程Fig. 1 Train traction strategy flow
2.2 分段确定惰行间隔
列车通过限速区域的过程如图2。

图2 前行列车与追踪列车的运行对比Fig. 2 Operational comparison of forward train and tracking train
初始状态下,前行列车和追踪列车的运行速度分别为V1,V2。前行列车在距离限速路段一定距离处(此处即为工况切换点)切除牵引力,将运行工况由牵引转为惰行。该距离满足前行列车由速度V1惰行至速度Vx,其中,Vx小于等于限速区域的限速值,惰行距离为S1,惰行时间为t1。惰行过程中,列车受到来自基本运行阻力的平均减速度为a。此时,追踪列车以速度V2匀速牵引。在前行列车的惰行时间t1内,追踪列车的运行距离为L1。经计算,L1小于区间追踪间隔Lmin,即此时,追踪列车未运行至限速区域前方的工况转换点,仍以速度V2匀速运行。因此,在t1内,追踪列车需要的相对惰行间隔距离为L1-S1,记为D1。然后,前行列车进入限速路段,以限速值匀速运行,直至通过限速路段。限速路段的长度为Sx,运行速度为Vx,通过限速路段的时间为tx。在tx内,追踪列车先以V2匀速运行,运行至工况转换点时,卸载牵引力,转为惰行。其中,追踪列车的匀速运行距离为L2,运行时间为t2,前行列车在限速路段的运行距离为S2。在t2内,追踪列车需要的惰行间隔距离为L2-S2,记为D2。追踪列车的工况切换时间为t3。在t3内,则追踪列车以V2匀速运行的距离为L3。前行列车在限速路段运行的距离为S3追踪列车需要的惰行间隔距离为L3-S3,记为D3。追踪列车经过t4的惰行时间后,速度降低至前行列车的运行速度,惰行距离为L4,前行列车的运行距离为S4。在t4内,追踪列车需要的惰行间隔距离为L4-S4,记为D4。此时,追踪间隔不会继续缩小。追踪列车总的惰行间隔距离为:Dz=D1+D2+D3+D4。
2.3 惰行过程中基本运行阻力的整定
列车在平直路况的整个惰行过程中,牵引力被卸载,只受到来自机械摩擦和空气摩擦的基本运行阻力。基本运行阻力与列车速度的平方成正比,其数学模型[10-11]如式(4):
f=mg(c0+c1V+c2V2)
(4)
式中:c0,c1,c2为经验系数;g为重力加速度,m·s-2;V为列车的运行时速,km·h-1。
基本运行阻力特性曲线如图3。

图3 基本运行阻力-速度曲线Fig. 3 Curve of basic operational resistance-speed
在笔者所研究的速度范围内,基本运行阻力如图3中“*”形曲线。为便于计算,列车在惰行过程所受到的基本运行阻力可取其平均值。在速度区间250 ~310 km·h-1内,基本运行阻力的平均值取f1=1.15×105N;在速度区间200 ~310 km·h-1内,基本运行阻力的平均值取f2=1.05×105N。列车在惰行过程中减速度的计算如式(2)。
2.4 目标函数的建立与求解
2.4.1 假设条件
假设1:限速路段前方路况为平直线路。
假设2:前行列车和追踪列车在相同运行速度下,基本运行阻力相等。
2.4.2 目标函数
惰行间隔的长度要满足追踪列车在区间追踪运行中惰行的需要,同时还要尽可能地缩短惰行间隔,以保证线路的运行效率。因此最小化的惰行间隔可表示为:
(5)
式中:Li为各个阶段中追踪列车的运行距离;Si为各个阶段中前行列车的运行距离。两者之差的最优值即为追踪列车的最优惰行间隔。
2.4.3 约束条件
约束条件如下:
1)列车在牵引过程中,牵引力F不得超过轮轨间的最大静摩擦力Fmax。
2)列车在制动过程中,最大常用制动力B不得超多轮轨间的最大粘着力Bmax。
3)列车通过限速路段的速度Vx不得超过限速值Vxian。
约束条件的数学表达如式(6)~式(8):
0≤F≤Fmax
(6)
0≤B≤Bmax
(7)
0≤Vx≤Vxian
(8)
式中:Fmax为轮轨间的最大静摩擦力,kN;Bmax为轮轨间的最大粘着力,kN;Vxian为限速路段的最高限速值,km·h-1。
2.4.4 目标函数的求解
在前行列车惰行时间t1内,追踪列车和前行列车运行的距离分别为L1、S1。L1、S1的计算式如式(9)、式(10):

(9)
(10)
在惰行时间t2内,追踪列车和前行列车运行的距离分别为L2、S2。L2、S2的计算式如式(11)、式(12):

(11)
(12)

在惰行时间t3内,追踪列车和前行列车运行的距离分别为L3、S3。L3、S3的计算式如式(13)、式(14):

(13)
S3=Vxt3
(14)
式中:t3=ta+tb+tc。
在惰行时间t4内,追踪列车和前行列车运行的距离分别为L4、S4。L4、S4的计算式如式(15)、式(16):

(15)
(16)
式中:t4=min[tx,t2+t3+tq]。
在限速路段运行的时间为:
(17)
追踪列车从速度V2惰行至Vx需要的时间为:
(18)
式中:Sx为限速路段的长度,m;V1为前行列车的运行速度,km·h-1;V2为追踪列车的运行速度,km·h-1;Vx为列车通过限速路段的速度,km·h-1;Lc为前行列车的长度,m;Lmin为最小相对追踪间隔距离,m;ta为牵引卸载时间,s;tb为车载设备反应时间,s;tc为机车确认信号至司机操作卸载命令的时间,s;a为列车在惰行过程中的平均减速度,m·s-2;tx为前行列车完全通过限速路段的时间,s;tq为追踪列车由运营速度惰行至限速值的时间,s。惰行间隔距离的计算流程如图4。

图4 惰行间隔计算流程Fig. 4 Calculation flow of coasting interval
3 仿真计算及分析
3.1 仿真数据
3.1.1 线路数据
京沪高铁设计时速为350 km·h-1,运营速度为310 km·h-1。其中:南段黄河大桥全长5 143.4 m,限速250 km·h-1;南京大胜关长江大桥全长9 273 m,限速250 km·h-1。
京广高铁设计时速为350 km·h-1,运营速度为310 km·h-1。其中,长沙段浏阳河隧道全长10 115 m,限速200 km·h-1。
3.1.2 车辆数据
列车型号为CRH380A,8辆编组,重量为388.4 t,长度为203 m,运营速度为310 km·h-1,区间最大常用制动平均减速度为0.75 m·s-2。ta=0.6 s,tb=3.5 s,tc=6 s。基本运行阻力系数:c0=3.25,c1=0.009 2,c2=0.000 308。
3.1.3 其他数据
重力加速度g=9.8 m·s-2,回转质量系数r=0.1,再生制动的利用率μ=0.3。
3.2 仿真结果与分析
经计算得到优化后的追踪间隔、制动能耗和减速度。与优化前相对比,数据如表1。表1中:Lmin为理想的最小追踪间隔;L′ 为加入惰行间隔后的追踪间隔。
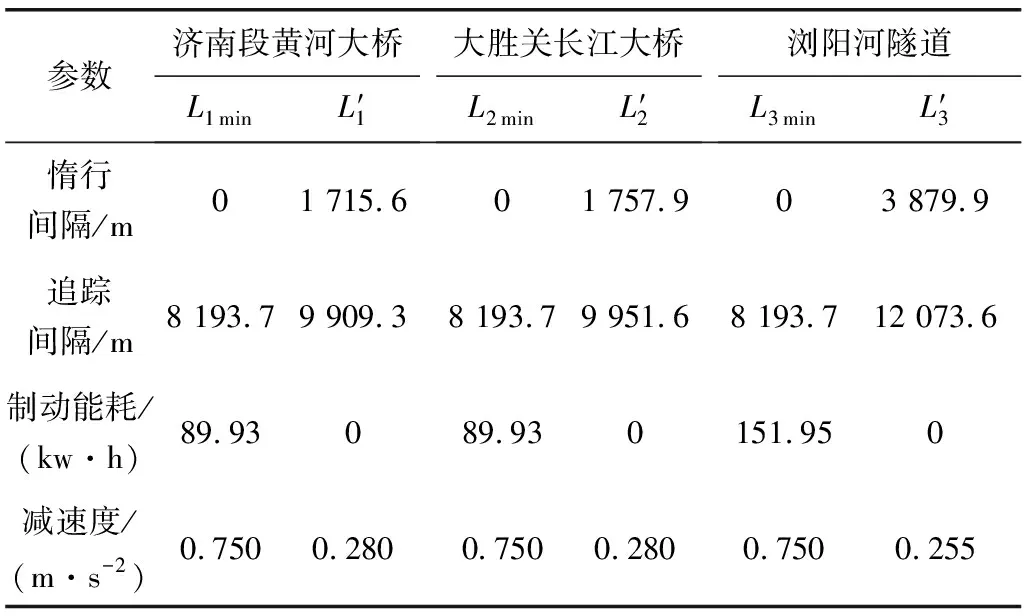
表1 加入惰行间隔前后追踪列车的运行情况对比Table 1 Operational comparison of the tracking train before and afteradding the coasting interval
经过对比L1min和L1′,L2min和L2′,L3min和L3′,可以发现:理想的最小追踪间隔距离更短,更有利于提高线路的运行效率,但是,追踪列车在制动的过程中,造成了动能的损失,增加了制动能耗,且减速度更大,不利于追踪列车的舒适性;添加了惰行间隔距离之后,最小追踪间隔虽然增大,但追踪列车减少了不必要的制动,避免了制动能耗;追踪列车运行在惰行工况,减速度较小,舒适性更好。
3.3 追踪列车的速度对比
以济南段黄河大桥为例,对比加入惰行间隔前后,追踪列车在限速区域的运行速度曲线,如图5。

图5 加入惰行间隔前后追踪列车的速度曲线对比Fig. 5 Comparison of the speed curve before and after adding the coasting interval
通过对比加入惰行间隔距离前后追踪列车的运行速度曲线可知,未加入惰行间隔距离之前,追踪列车在得知前行列车减速时,车载ATP将启用最大常用制动,维持追踪列车与前行列车的最小追踪间隔,将速度降至前行列车速度以下,才允许缓解。最大常用制动减速度为0.75 m·s-2。加入惰行间隔之后,追踪列车的运行工况先由牵引转为惰行,在惰行大约60 s之后,惰行速度等于前方列车的运行速度。此时,追踪间隔距离不会被进一步缩小,运行工况由惰行转为匀速牵引。在惰行阶段,平均减速度为0.28 m·s-2。经过对比可以看出,加入惰行间隔后列车速度曲线的斜率明显小于未加入惰行间隔列车速度曲线斜率,说明加入惰行间隔后,追踪列车舒适性更好。
3.4 影响惰行间隔距离的因素分析
通过对比L1′和L2′可以发现:追踪列车所需惰行间隔的长度与限速路段的长度有关。在一定范围内,限速路段越长,前行列车在限速路段的运行时间越长,追踪列车所需要的惰行距离越大。通过对比L2′和L3′可以发现:追踪列车所需惰行间隔的长度,和限速值与运营速度的速度差有关,速度差越大,追踪列车所需要的惰行间隔距离越大。图6为追踪列车分别在限速250、200 km·h-1条件下的区域运行速度曲线。

图6 不同限速条件下追踪列车的惰行时间对比Fig. 6 Comparison of the tracking train’s coasting time at different speed limits
在限速250 km·h-1的条件下,追踪列车的惰行时间为59.6 s。此时,追踪列车的惰行速度满足限速值的要求,列车牵引工况转为匀速行驶,惰行间隔距离不会继续扩大。假设前行列车按照限速值匀速运行,此时,前行列车的运行距离为7 305.4 m,即在限速250 km·h-1的条件下,当限速区域的长度达到7 305.4 m时,追踪列车的惰行速度已经等于限速值,因此,所需的惰行间隔不再随着限速路段长度的增加而增加。
4 结 语
惰行间隔是减少追踪列车不必要制动的一段惰行距离。惰行工况与制动工况相比,减速度更小,旅客的舒适度更高,并且避免了制动过程中的动能损失。以京沪高铁南京大胜关长江大桥路段为例,在不考虑惰行间隔时,最小追踪间隔可以达到8 193.7 m,但是,在维持安全距离的制动过程中,制动的平均减速度为0.75 m·s-2,制动能耗为89.93 kw·h;加入惰行间隔后,虽然追踪间隔增加到9 951.6 m,但是,惰行过程中的平均减速度为0.28 m·s-2,惰行过程中无制动动作,因此避免了制动能耗。因此,惰行间隔给追踪列车提供了惰行的运行区间,减少了追踪过程中不必要的制动,使得追踪列车既避免了制动能耗,又提高了舒适性。虽然总的区间追踪间隔变大,但是,更具有现实的意义,也为列车区间追踪的操纵策略提供了新的思路。
猜你喜欢
工会博览(2022年5期)2022-06-30
现代仪器与医疗(2021年2期)2021-07-21
数学小灵通(1-2年级)(2020年11期)2020-12-28
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
小学生学习指导(低年级)(2019年3期)2019-04-22
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
建筑热能通风空调(2018年5期)2018-07-09
消费者报道(2016年3期)2016-02-28
