
基于形状上下文匹配方法的有杆抽油系统故障诊断
2019-09-05 08:14王东宇刘宏昭
中国石油大学学报(自然科学版) 2019年4期
王东宇, 刘宏昭, 任 慧
(1.西安理工大学机械与精密仪器工程学院,陕西西安 710048; 2.西安理工大学经济与管理学院, 陕西西安 710054)
泵功图包含了抽油泵工况的丰富信息。不同井下问题都会通过泵功图形状特征体现,因此可以根据泵功图来诊断井下设备的故障。诊断过程包含特征提取和特征匹配两部分;目前常见的泵功图特征提取方法有两种:灰度特征和几何特征[1-3]。常见的泵功图匹配技术有神经网络法、支持向量机法等。通过采用泵功图特征提取方法与匹配技术的结合可诊断出抽油泵的故障情况[4-6]。起初在泵功图的故障诊断技术中多数学者都利用灰度理论对泵功图进行特征提取[7-9]。随后学者又对泵功图的几何特征进行提取。王科科[10]提取不变矩和泵功图形状特征,使用BP神经网络诊断抽油泵的工况。姜民政等[11]提取泵功图的不变矩特征,应用SOM神经网络识别故障类型。Li等[12-13]提取泵功图28个不变曲线矩特征向量,先后采用粒子群算法和改进的果蝇优化算法诊断抽油系统的故障。形状上下文(shape context)算法[14-16]能够描述轮廓上每个点与轮廓上其余点的空间分布关系,有很强的形状描述能力,被广泛应用于各个领域,例如遥感图像的匹配[17],道路标识牌的检测[18]以及图像拷贝的检测[19]等。因此,笔者选择形状上下文算法描述泵功图的形状,计算待诊断泵功图和故障泵功图之间任意两点的匹配代价值,获得代价矩阵;利用回溯法对代价矩阵进行搜索,计算匹配代价值,诊断抽油泵的故障类型。
1 泵功图获取
鉴于实测泵功图的获取难度,通常对有杆抽油系统建立诊断模型。通过对模型的求解,将抽油机悬点示功图转化为泵功图。现有的诊断模型大多是根据吉布斯方程[20]演变而来,本文中选取多级杆柱运动的波动方程[21],表示为

其中
(1)

将抽油机的悬点位移和悬点载荷作为波动方程的一个边界条件[21],利用有限差分法对方程(1)求解,可获得抽油杆柱第i个节点处在时刻j的位移uij。
抽油泵处柱塞载荷对应于抽油杆柱的末端。根据牛顿后插公式,可获得抽油泵载荷计算公式[2]为

(2)
式中,Er为抽油杆柱末端的弹性模量,MPa;Ar为抽油杆柱末端的横截面积,m2;Δx为抽油杆柱的离散步长,m。
将获得的抽油杆柱第N-2、N-1和N节点处在时刻j的位移uN-2,j、uN-1,j和uN,j带入式(2)中,即可获得抽油泵在时刻j受到的载荷FN,j,进而绘制泵功图。
2 基于形状上下文匹配方法
为了计算两个待匹配泵功图的相似程度,采用基于形状上下文的匹配方法。首先选取轮廓上有规律的不连续的样本点表示轮廓。其次利用形状上下文描述符对轮廓上的点进行描述,将二维图像转化为矢量集。然后,计算两个待匹配的形状轮廓点之间的匹配代价值,获得一个代价矩阵。最后,采用回溯法在代价矩阵中搜索到最优匹配点集,计算两个待匹配泵功图的匹配代价值。
2.1 形状上下文算法
形状上下文是一种基于轮廓点集空间分布的描述符。利用形状上下文描述符进行形状描述,可以获得轮廓上点与点之间的距离以及点在形状中的相对位置关系。基本思想是对于N个点的形状轮廓,任意一点与其余N-1个点的矢量集表示该点相对于整个形状的信息。由此,一个二维图像可以表示成N个矢量集。考虑到位置分布的二维不变性,将笛卡尔坐标系上的点进行对数极坐标变换,以对数极坐标的直方图表示点的位置分布。
形状I(x,y)到I(r,θ)的极坐标变换定义为
(3)

(4)
一般情况下(x0,y0)为坐标原点。
用复数表示为Z=x+iy=r(cosθ+isinθ)=reiθ。令ω=lnZ=lnr+iθ,则笛卡尔坐标转换为对数极坐标的映射方程为p(r,θ)=lnr,q(r,θ)=θ。因此,当笛卡尔坐标中的图像相对于坐标原点发生缩放和旋转变化时,即图像放大r0倍,旋转θ0度,相应的极坐标为(r+r0,θ+θ0),对数极坐标空间ω(μ,v)的图像只产生平移,即μ=lnr0+lnr,v=θ0+θ。这就是所谓的对数极坐标映射的二维不变性。
给定一个轮廓上的点集P={p1,p2,…,pN},计算任意点pi(i=1,2,…,N)的对数极坐标直方图。以pi为坐标原点进行对数极坐标变换。以点pi为极坐标原点,将整个二维平面分为4×n个方向(n为正整数),按照lnr划分为3份,整个平面被分为12n份,每一份定义为一“格”;统计点集P落在12n个格中的个数。以12点方向为基准,顺时针定义4n个方向为直方图的列,每个方向沿原点向外的每个格定义为直方图的行。根据统计的个数获得点pi的直方图。这个直方图为pi点的形状上下文。
图1给出了形状上下文的描述过程。其中图(a)为形状一的轮廓取样点, (b)为形状二的轮廓取样点,(c)、(d)和(e)分别是以(a)中三角点、正方形点和(b)中圆形点为对数极坐标原点的变换图,(f)、(g)和(h)为n取2时这3个点对应的形状直方图。

图1 形状上下文描述过程Fig.1 Description process of shape contexts
为了描述两个形状轮廓中任意两点的匹配情况,定义了两点的匹配代价。设pi为第一幅图轮廓上的一点,qj为第二幅图轮廓上的一点,pi和qj的匹配代价为Cij=C(pi,qj),运用χ2分布,有
(5)
式中,hi(k)为pi直方图中第k格的数值;hj(k)为qj直方图中第k格的数值。
根据方程(5)便可计算两幅泵功图轮廓点集中每两个点之间的匹配代价值。
2.2 形状匹配
对于两个待匹配的泵功图,设实况泵功图提取的轮廓点数为N,故障泵功图提取的轮廓点数为M,根据这两个形状点集之间的匹配代价函数生成一个代价矩阵(以轮廓点数多的作为横坐标,轮廓点数少的为纵坐标)。采用搜索法对两幅泵功图的轮廓点进行全局匹配,使得代价矩阵中第一行第一列元素和最后一行最后一列元素被选择,获得两幅泵功图的匹配代价值。
考虑到回溯法是以深度优先方式搜索解空间,并且在搜索过程中能够避免无效搜索,因此采用回溯法搜索代价矩阵。具体步骤如下:
(1)从开始结点(根结点)出发,向纵深方向形成搜索子空间并移至一个新结点(活结点);
(2)从新结点(活结点)出发,如果新结点可以在搜索子空间中移动,那么新结点为活结点,找到下一个新结点;否则新结点为死结点,此时应往回移动(回溯)至最近一个活结点重新搜索;
(3)不断重复步骤(2)过程,直至搜索到代价矩阵的边界,此时搜索结束。
通过回溯法搜索代价矩阵,最终实现两点集终点到终点、起点到起点的最优对齐,满足匹配点数最多、空格和不匹配点数最少的要求。定义搜索目标为总代价值最小,表示为
(6)
式中,pi为实况泵功图轮廓点;qπ(i)为与其对齐的故障泵功图轮廓点。
泵功图中的轮廓点是从图中左下角抽油机的下死点处(图2中的*点)按顺时针顺序形成的,因此回溯开始在代价矩阵的最后一行最后一列处,采用当前位置的相邻空间作为搜索子空间。当代价矩阵的行列数相差不大时,搜索子空间就相对较小,可以从开始点处以左、上、对角位置为回溯点,即2×2的子空间;当代价矩阵的行列数相差较大时,搜索子空间也相对增大,从2×2的搜索空间开始逐渐增加空间尺寸,来尽可能的实现全局最优对齐。然后,利用回溯法获得代价矩阵的回溯路径,即两个形状点集的对应关系。最后,定义对齐的两形状轮廓点的总代价值除以实况泵功图轮廓点数为两形状的匹配代价值,用F(N,M)表示,且该值越小表示两个形状越相似,其中
F(N,M)=H(π)/N.
(7)

图2 轮廓点生成顺序Fig.2 Formation order of contour points
例如,两个形状轮廓上的点集分别是P={p1,p2,…,p250},Q={q1,q2,…,q145},利用形状上下文算法对两个形状轮廓进行描述,并根据任意两个点的匹配代价值生成一个250×145的代价矩阵,图3为代价矩阵的一部分。由于代价矩阵的行数和列数相差较多,在回溯法中采用4×3矩阵的搜索子空间能够实现两个形状的全局最优对齐。图3中的虚线框为搜索子空间,实线框为匹配点对,同时实线框构成了回溯路径。当回溯路径中某一点对应多个点时,选择其中匹配代价值最小的为匹配点。当代价矩阵中某行或某列中未出现回溯点,则说明该点不匹配。如果待诊断的泵功图轮廓上出现不匹配的点,则给该点设置一个较大的匹配代价值(代价矩阵中最大的代价值)。

图3 4×3搜索空间下的回溯路径Fig.3 Trace-back path in 4×3 search space
3 实例分析
为了验证所提出的基于形状上下文匹配方法的有效性,以文献[7]中给出的油井1#和7#的实测悬点数据以及辽河油田两口油井作为验证算例。图4为根据实测悬点载荷绘制的待诊断4口油井悬点示功图。

图4 待诊断油井悬点示功图Fig.4 Polished rod dynamometer cards of oil wells to be diagnosed
抽油泵常见的故障类型有气体影响、供液不足、游动阀漏失、固定阀漏失等。以这4种故障泵功图和正常泵功图作为样板图,分别与4口油井的实况泵功图进行匹配,诊断这4口井的故障。将已知油井的实测悬点位移和悬点载荷带入方程(1)和 (2),将悬点示功图转化成泵功图;提取两幅泵功图轮廓上的离散点集,利用形状上下文算法获得两点集中每个点的上下文信息;计算两点集中任意两个点之间的匹配代价值,得到代价矩阵;使用回溯法搜索代价矩阵,找到最优的点集对应关系;计算两幅泵功图的匹配代价值,判断故障类型。具体流程见图5。
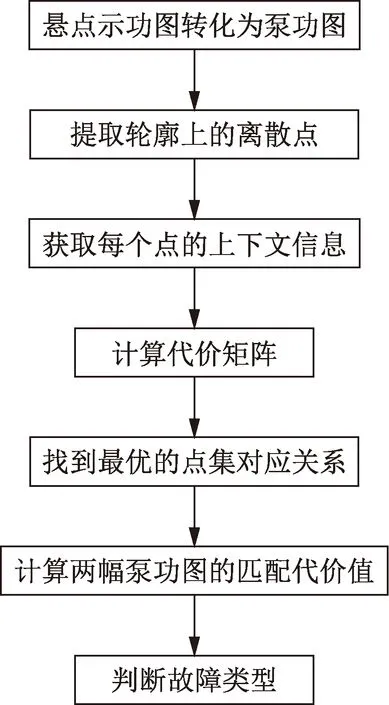
图5 基于形状上下文匹配方法流程Fig.5 Flow chart based on shape context matching method
考虑到匹配过程中产生的数据较多,只给出油井1#的匹配数据。由实测悬点的位移和载荷,获得油井1#的泵功图,如图6所示。提取泵功图上的离散点,描述每个点的形状上下文信息。任取泵功图上*和两个点为例,绘制形状上下文直方图:根据形状上下文算法,分别以这两点作为极坐标原点,将整个二维平面分为12个方向,获得这两点的形状直方图,如图7所示。根据油井1#泵功图和正常泵功图的上下文信息,计算这两幅图中任意两个点之间的匹配代价值,获得这两幅图的代价矩阵。采用回溯法找到代价矩阵中的回溯路径,见图8。结合方程(7),获得两幅泵功图的匹配代价值。
为了验证本文方法的有效性,表1给出了基于灰度理论的诊断结果以及提出的基于形状上下文匹配方法的诊断结果。便于和灰度关联值进行比较,计算的匹配代价值均已归一化处理。归一化过程为:选取同一油井实测泵功图与样板图的匹配代价最大值并向上取整,然后用每一个匹配代价值与该整数相除。基于灰度理论方法是以灰度关联值最大为诊断结果,基于形状上下文方法是以匹配代价值最小为诊断结果。由表1可知,本文方法的诊断结果和实际情况相同,这说明提出的匹配方法是有效的。

图6 油井1#泵功图Fig.6 Pumping dynamometer card of well 1#

图7 两点的形状直方图Fig.7 Shape histogram of two points
为了说明匹配方法诊断结果的可靠性,定义了最小对比度:计算结果中最优和次优两个数值差值的绝对值除以二者中较大的数值。最小对比度越小,说明最优值和次优值越接近,诊断结果越易受到计算误差等因素的影响。观察表1可知,在灰度理论方法中油井1#的泵功图与气体影响的灰度关联值为0.993 9,与泵正常的灰度关联值为0.990 3、与游动凡尔漏失的灰度关联值为0.989 7,虽然诊断结果为气体影响,但是油井1#诊断结果的灰度关联值与其他故障的最小对比度仅为3.6×10-3。而提出的基于形状上下文匹配方法获得的匹配代价值与其他故障的最小对比度为0.547 7。与此同时,对于油井7#、辽河4#和5#的泵功图,基于灰度理论诊断结果的最小对比度分别为5×10-4、7.9×10-3和3.7×10-3,而本文方法诊断结果的最小对比度分别为0.049、0.215 6和0.022 2,明显大于灰度理论的最小对比度。因此本文提出的匹配方法提高了抽油泵故障诊断的可靠性。

图8 油井1#泵功图和正常泵功图匹配代价矩阵中的回溯路径Fig.8 Trace-back path in cost matrix of pumping dynamometer cards between well 1# and normal well

油井参数工况泵正常气体影响供液不足游动阀漏失固定阀漏失最小对比度/%诊断结果实际情况油井1#灰度关联值匹配代价值0.99030.99390.77690.98970.98550.36气体影响0.84980.74920.91210.98730.79485.74气体影响气体影响油井7#灰度关联值匹配代价值0.99830.77860.95250.99780.98550.05泵正常0.55860.69720.96980.61380.58744.90泵正常泵正常油井4#灰度关联值匹配代价值0.91110.88810.87420.90410.90280.79泵正常0.68300.88480.96540.87070.970721.56泵正常泵正常油井5#灰度关联值 匹配代价值0.90040.90770.88100.90430.89380.37气体影响0.77330.66060.67560.78800.99352.22气体影响气体影响
4 结 论
(1)针对基于灰度理论的图像匹配技术存在的匹配可靠性问题,根据泵功图的几何特征,提出的基于形状上下文的匹配方法能准确地描述细节较多的泵功图,从形状描述符的选取上保证了匹配结果的准确度。
(2)新匹配方法以两幅图的匹配代价值表示它们的相似程度,且匹配代价值越小两幅图越相似,能够准确诊断出实测泵功图的故障类型。给出的4个算例的诊断结果与实际情况相同验证了本文提出的方法的有效性。
(3)基于形状上下文的匹配方法的最小对比度明显高于基于灰度理论的匹配方法,提高了有杆抽油系统故障诊断结果的可靠性,对细节较多的泵功图诊断问题提供了更准确的匹配方法,可以广泛应用于油井的故障诊断作业中。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
电子制作(2022年1期)2022-01-28
电子制作(2021年14期)2021-08-21
安徽电子信息职业技术学院学报(2020年5期)2020-11-13
摄影之友(影像视觉)(2018年12期)2019-01-28
试题与研究·教学论坛(2017年32期)2018-01-25
初中生世界·八年级(2017年3期)2017-03-24
中学生数理化·高二版(2016年5期)2016-05-14
