
基于修正罗德里格参数的绳系卫星动力学模型
2019-09-19 10:04唐溢敏战兴群
航天控制 2019年4期
唐溢敏 战兴群
上海交通大学,上海200240
空间绳系卫星系统是指通过系绳将2个及2个以上的宇宙空间飞行器连接起来完成组合飞行任务的空间卫星系统。在卫星动力学研究领域,绳系卫星系统的研究是非常具有挑战性的。通常情况下,该系统是一个相对简单的二体系统,即由一颗质量较大的母星,一颗相对小型的卫星和一根质量可以忽略的系绳构成[1-2]。空间绳系卫星系统有以下应用:通过系绳完成空间探测和对其他远距离星体的远程控制;通过系绳进行货物运载[3-4];通过系绳两端卫星的高度差来探知重力梯度的变化[5];通过子星和主星动量的交换来完成卫星升轨、降轨和入轨等多个任务[6];通过电动力系绳在电磁力场的运动进行太空发电或无燃料加减速[7];系绳连接多颗卫星可以实现空间编队飞行,进行卫星间的相互协作[8]。
在20世纪80年代以前的绳系卫星模型相对简单,学者通常将绳系卫星系统看作一个整体,将系绳看作是一根可以伸缩的刚性杆或者弹簧,再将此刚性杆和弹簧的伸缩和扭转根据特定的限制进行模型假设。90年代美国与意大利合作的绳系卫星系统TSS-1是由20km长的绝缘系绳、主星和子星组成,在系绳张紧拉直时,整个绳系卫星系统的质心运动可以看成是传统航天器的质心运动[3]。BEDA P.B.研究了哑铃模型在受到大气影响时平衡状态下的姿态稳定性问题[9],Watanabe N.和Onoda J.基于哑铃模型研究了低轨道绳系卫星系统在重力梯度的影响下,面内的摆角运动控制问题[10]。90年代之后,绳系卫星的应用潜力和前景引起了科学家的广泛关注,绳系卫星模型的建立和发展也得以迅猛发展。绳系卫星系统的动力学模型由连续模型向离散模型和柔性绳模型发展,这些模型在动力学姿态描述上的精度比刚性的哑铃模型和桌球模型高,其计算复杂度也高很多[11-12]。朱仁璋等选取系统质心与主星质心一致采用绳系珠式模型(Bead Model) 建立了仿真度更高的绳系卫星系统动力学模型[13]。冯杰等研究了系绳质量、系统质心的变化及状态和控制限制约束,建立了绳系卫星网捕的动力学模型[14]。郑鹏飞等建立了绳系卫星系统受大气阻尼干扰下的系绳展开动力学和卫星的姿态动力学模型[15]。
在动力学方程中,常见的姿态描述参数主要有:欧拉角、等效旋转矢量法、方向余弦矩阵、四元数、修正罗格里格参数及其变化形式[16]。欧拉角是一组由3个元素组成的参数,对旋转描述无冗余,但在旋转角为90°时产生奇点。方向余弦矩阵和欧拉角可以相互推导,有9个分量,无奇点,但增加了计算复杂度。四元数是一组满足特定条件的4个元素的参数,无奇点,但对旋转描述有一个参数的冗余。修正罗格里格斯参数(Modified Rodrigues Parameters,MRPs)是一组由三个元素组成的参数向量,在旋转角为2π时,有奇点。在旋转角为0时,修正罗德里格参数的阴影(Shadow Modified Rodrigues parameters)有奇点。将修正罗德里格参数和它的阴影参数结合起来,可以得到一组无冗余无奇点的姿态描述参数[17]。
蒙特等采用MPRs描述卫星的姿态以降低滤波器的维数并有效避免了使用四元数求解状态误差协方差参数时的奇点[18]。靳永强等采用传统的修正罗德里格参数建立了无陀螺的状态观测模型和矢量观测模型[19]。张红梅等发挥UKF非线性滤波方法和MRPs的优势设计了用MRPs描述的无陀螺飞行器的无奇点的姿态估计器[20]。可以看出,MRPs参数以及MRPs及其阴影的结合在姿态描述上具有广泛应用,且能有效解决使用四元数和欧拉角进行姿态描述的诸多问题,比如奇异问题和计算复杂度大等问题。
在绳系InSAR系统中,系绳将2颗及以上SAR卫星连接,通过快速展开至目标构型完成地形测绘等多个任务。在某些特定的任务要求下,系绳需要与轨道平面保持垂直[21]。欧空局通过配置绳系飞网捕获机构或者绳系飞爪捕获机构进行目标捕获的ROGER(Robotic Geostationary Orit Restorer)(2002年)可用于捕获空间碎片[22]。但绳系卫星的子星和目标星交会时,经常会出现绳系卫星和目标星不在同一轨道高度,或者不在同一轨道平面内(特别是ROGER计划中的飞爪型ROGER携3个飞爪,可同时飞出,形成对较大目标的包围,进行捕获),势必会面临目标星不与绳系卫星系统共面和共轨的情况。
针对以上问题,提出了一种利用修正的罗德里格参数(MRPs)结合其阴影来替代传统的欧拉角进行绳系卫星刚性动力学模型的描述方法,该模型有效消除了原模型在面外角为90°时的奇点问题。为验证其可行性,首先对模型进行了推导和证明,验证了修正罗德里格参数与其阴影切换的数值点选取的合理性,然后进行了仿真实验,实验结果证明,该方法能在消除奇点的优势、不改变欧拉角的连续性变化下,建立绳系卫星动力学模型,可应用于绳系卫星异面交会、绳系InSAR系统等多个场景下。
1 基于修正罗德里格参数的动力学模型建立
1.1 基于欧拉角的动力学模型描述


(1)

可以看出,该动力学方程有2类奇点:lc=0和cosφ=0。lc=0时:系绳长度无限趋于0,导致绳系姿态运动不稳定,为消除此类奇点,我们选择在系绳展开/收回阶段或完全展开时,即绳长大于一定值的情况下,应用此方程。cosφ=0:出现在面内角方程中,此类奇点出现在面外角为90°时,即系绳与轨道面垂直的情况下。为消除该类奇点,之前有文献提出通过两组不同的欧拉角的动力学方程组的转化来消除奇点的方法,但此方法大大增加了算法的复杂度[24-25];也有文献[26]提出在|cosφ|<10-4时,取|cosφ|=10-4,但此类方法需要在保证面内摆角精度的前提下使用,有所局限。本文提出用修正的罗德里格参数和其阴影来替代欧拉角作为动力学方程的姿态描述参数,能够在确保精度和不增加大量算法复杂度的前提下,有效保证奇点的消除。
1.2 模型推导及建立
假设系绳的长度和方向已经可以控制在一定精度下,且不存在松弛和弯曲的情况,我们可以将系绳看成一根刚性杆,式(1)可以化简为:
(2)

(3)
修正罗德里格参数(Modified Rodrigues Parameters,MRPs)[1]是一组由3个元素组成的向量,对旋转描述无冗余,表示如下:
(4)
其中,σ∈R3;e为欧拉轴;Θ为欧拉旋转角,在Θ=±2π+4kπ,k∈Z时,无法运用此式描述姿态旋转。MRPs也可以由四元数{ε,η}表示为σ=ε/(1+η),其中ε∈R3,η∈R。
MPRs的导数与旋转角的关系描述如下:

(5)
其中,ω为系绳本体坐标系相对于轨道坐标系的旋转角速度在本体坐标系中的表示,G(σ)的形式如下:

(6)
G(σ)具有以下特性:
(7)
G(σ)-σ×=GT(σ)
(8)
(9)

MRPs的阴影可表示如下:
(10)
也可以由四元数表示为:
(11)
可以看出,σT的奇点在Θ=4kπ,k∈Z。

(12)

(13)

(14)
根据旋转特性得到:
(15)
对式(15)求导并与式(14)联立,可以建立欧拉角与修正的罗德里格参数的转换关系,即:

(16)
(17)
其中,Cφ=cosφ,Sφ=sinφ,Cθ=cosθ,Sθ=sinθ。
用修正的罗德里格参数表示姿态旋转矩阵如式(18):
(18)

结合式(3),得到此时欧拉角与修正的罗德里格参数的关系如式(19):
(19)
联立式(5)和(15)得到
(20)
将式(17)、(19)和(20)代入式(2),得到基于修正的罗德里格参数的绳系卫星系统动力学模型如下:
(21)
其中,D=|C|,
(22)
1.3 可行性分析
若用修正的罗德里格参数描述旋转,由旋转连续公式得到:

(23)
其中,
(24)

(25)

2 仿真结果


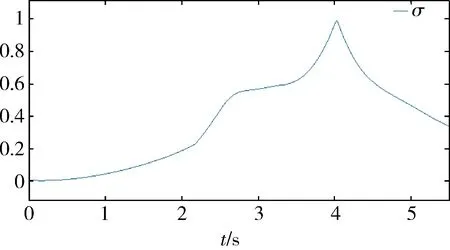
图1 MRPs随时间的变化值

图2 cosφ随时间的变化值
从图1和2中可以看出,在t<4.05s时,MRPs参数过度平缓,cosφ可以由MRPs参数表示,见式(19)。在图 2中,cosφ有2次平稳经过为0的点(标注为实心点),说明该模型能够消除原使用欧拉角的动力学模型中面外角为90°时的奇点问题。

图随时间的变化值
3 结论
提出了一种将修正罗德里格参数及其阴影结合建立绳系卫星系统动力学模型的方法。使用该模型对绳系卫星系统的姿态变化进行仿真,能够有效解决基于欧拉角的绳系卫星系统动力学模型在绳系卫星系统的面外角为90°存在奇点情况下不稳定的问题,为绳系卫星系统动力学模型的全局分析提供了可行的解决方案。而且,修正的罗德里格参数及其阴影在转换点处的非连续性转换,不会影响到欧拉角的连续性变化和表示,具有很强的延展性和实用性。
本文证明了该模型在消除奇点问题上的可行性,后续针对所提出的非线性的动力学模型的控制方法需要作进一步的探讨;另外,修正罗德里格参数和四元数同样不具有直观的物理意义,仍然需要将MRPs转化为欧拉角进行观察和研究,这增加了一定的计算复杂度。
猜你喜欢
北京航空航天大学学报(2021年7期)2021-08-13
空间科学学报(2021年6期)2021-03-09
科技视界(2017年6期)2017-07-01
导弹与航天运载技术(2017年3期)2017-06-22
自动化学报(2017年4期)2017-06-15
宇航学报(2017年1期)2017-03-27
软件导刊(2016年11期)2016-12-22
北京航空航天大学学报(2016年4期)2016-02-27
西北工业大学学报(2015年6期)2015-10-22
舰船科学技术(2014年3期)2014-08-26
