
一种机械式多稳态压电俘能器及其特性研究
2019-10-22 09:27汪灿,谢进,马戈,邹政
压电与声光 2019年5期
汪 灿,谢 进,马 戈,邹 政
(西南交通大学 机械工程学院, 四川 成都 610031)
0 引言
从环境振动中收集能量为无线传感器、便携式电子设备等低功耗设备供能成为近年的研究热点[1]。由于压电俘能器具有能量密度高及结构简单的优点,被广泛用于振动能量的收集[1]。研究表明,非线性压电俘能器具有比线性压电俘能器更好的俘能性能[2-7],关于非线性双稳态压电俘能器已有大量的研究成果[2-3]。最近研究结果表明,三稳态压电俘能器具有比双稳态更好的低频俘能性能[4-7]。文献[4-5]利用2个可旋转的外部磁铁与固定在悬臂梁自由端的磁铁形成三稳态系统。文献[6-7]通过实验和仿真证实了在随机激励下,三稳态系统也具有更好的俘能性能。
现有双稳态系统和三稳态系统多数都是通过磁铁来引入非线性恢复力。然而,在某些特殊应用场合,磁铁产生的磁场或许对周围环境产生影响,反之,周围环境也会影响到俘能器的磁场,进而影响俘能器的性能[8]。因此,人们又提出了各种机械式的非线性俘能器结构。文献[8]将线性俘能器用线性弹簧连接起来,形成单稳态的非线性俘能器;文献[9]设计了一个悬臂摆的单稳态俘能器,通过摆的运动,引入非线性恢复力。文献[10]将弹簧倾斜安装在基座上,使弹簧与质量块运动方向保持一定的角度,通过这种方式引入了非线性恢复力,形成双稳态的非线性俘能器。
本文利用一种具有多稳态特性的机械结构作为俘能器。分析了其系统参数与结构稳态间的关系,并利用数值仿真法研究了在简谐激励和随机激励下系统的俘能特性。
1 系统的物理和计算模型及稳态分析
1.1 系统的物理和计算模型
本文提出的多稳态结构俘能器的物理结构如图1(a)所示。2根线性弹簧对称布置于悬臂梁未发生变形时平衡位置的两侧。当无外部激励时,悬臂梁静止,两弹簧处于压缩状态。在悬臂梁上、下两侧各粘结一层宽度和长度与悬臂梁均相同的压电片。当基座在外部激励下发生振动,使得悬臂梁产生变形,导致压电片发生变形,由压电片的压电效应可实现振动能向电能的转化。
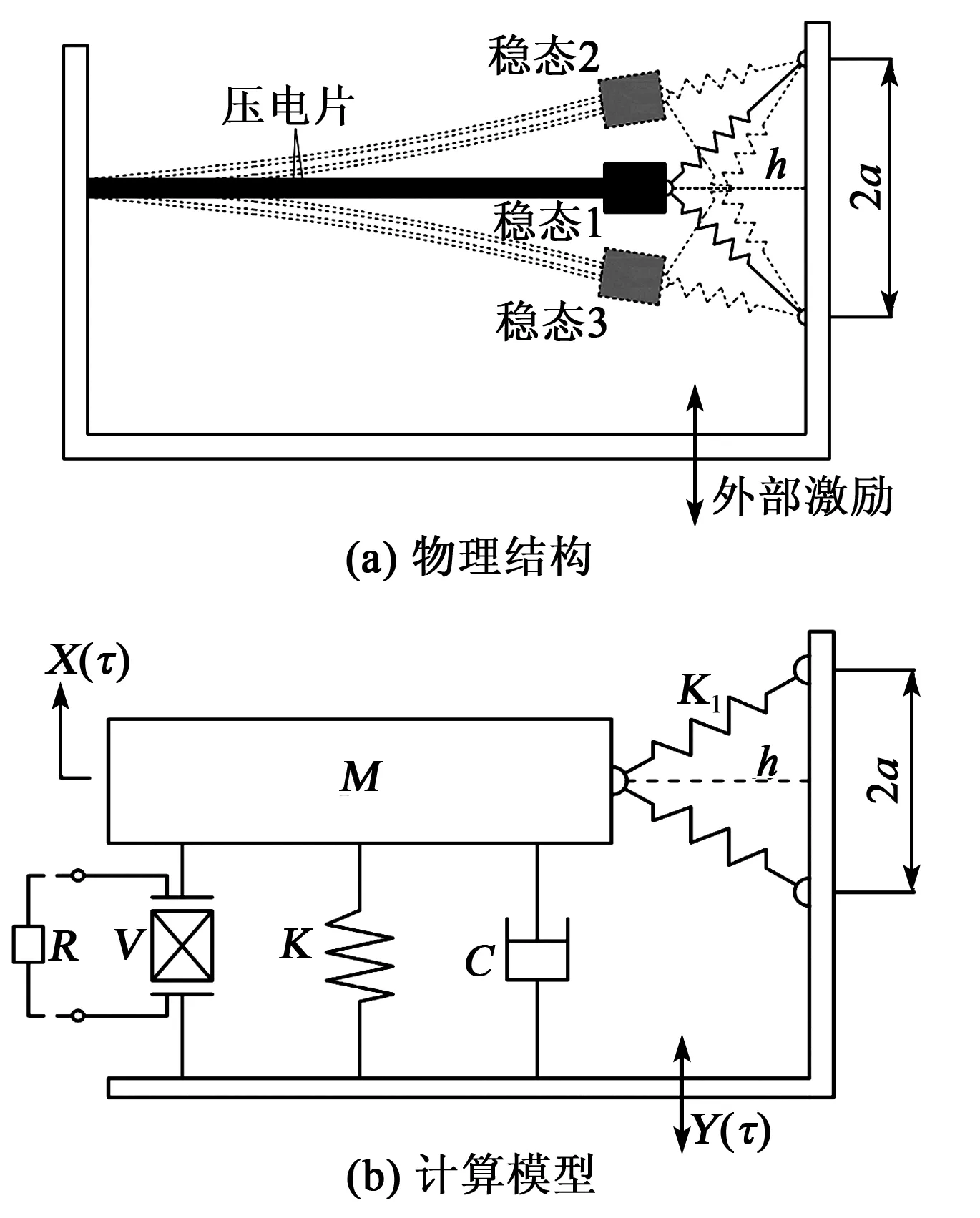
图1 机械式多稳态俘能器的物理结构及计算模型
图1(a)所示物理结构可利用集中参数法将悬臂梁简化成典型的弹簧阻尼系统,如图1(b)所示。图中,M、K和C分别为系统的等效质量、等效刚度和等效阻尼,K1为两线性弹簧的刚度系数,R为负载电阻,V为悬臂梁的输出电压,h为悬臂梁末端距右端基座的垂直距离,2a为两线性弹簧在基座上的距离,X(τ)为悬臂梁的振动位移,Y(τ)为外部激励。
由压电本构方程、牛顿第二定律和基尔霍夫定律,可得系统的动力学方程[11]为
MX″+cX′+KX+F1-θV=-MY″
(1)
(2)
式中:CP为等效电容;θ为机电耦合系数;F1为两线性弹簧力在竖直方向上的分力;X,Y分别为X(τ),Y(τ);X′为X对τ的微分。
根据线性弹簧的位置和几何关系可得

(3)
式中L为弹簧原长。
(4)

(5)

(6)
1.2 系统势能函数及稳态分析
由式(4)可得系统的无量纲势能函数为

(7)
势能函数的最小极值点对应系统的稳定点,每个稳定点对应系统的一个稳定状态(稳态)。
由式(7)可看出,系统的稳态数目与刚度比μ、弹簧的位置参数α、β有关。分别取μ=0.1、0.25、1、4、10,得到系统的稳态随着α、β的变化而变化的规律,如图2所示。
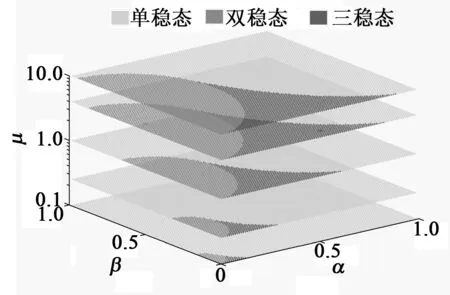
图2 系统稳态特性参数分布图
由图2可看出,系统可产生1个稳定点的单稳态、2个稳定点的双稳态和3个稳定点的三稳态。随着μ的增大,系统产生多稳态的参数区域也将增大。
为了更直观地了解参数μ、α、β对势能函数及稳态数目的影响,取α=0,β=0.8,μ=1、4、10,作出势能函数变化图,如图3(a)所示。由图可见,当μ=1时,系统为单稳态;当μ=4和μ=10时,系统为双稳态,μ值越大,则势能U的最小值与最大值之差(即势垒)越大,两势能U最小值之间的间距(即势阱间距离)略微增加。

图3 势能函数与系统参数之间的关系
再取μ=1,β=0.2,α=0.1,0.3,0.8作出势能函数变化图,如图3(b)所示。由图可见,当α=0.1时,系统为双稳态;当α=0.3,系统为三稳态;当α=0.8,系统为单稳态。由图还可看出,与双稳态相比,三稳态系统具有更低的势垒,这意味着三稳态系统更易越过势垒做大幅阱间运动。参数β对势能函数及系统稳态数目的影响与参数α类似。
2 俘能器的俘能特性
根据文献[12]可知,系统的输出功率与均方根电压的平方成正比,本文以无量纲均方根电压作为系统俘能效果的评价指标,无量纲均方根电压为
(8)
式中:vi为无量纲离散输出电压值;n为离散电压取样点数。
3 简谐激励下俘能器的运动与俘能特性
设外激励为简谐激励,即

(9)
由文献[5,13-14]可知,对于不同的压电俘能器结构,激励幅值大小对压电俘能器俘能性能的影响基本一致,即随着激励幅值的增大,压电俘能器的输出电压、工作带宽均随之增加。故此重点研究激励频率对系统的影响,取无量纲激励幅值f=0.4。
取系统参数ξ=0.05,γ=0.5,λ=0.05,μ=1,β=0.2。为了比较系统在各种稳态下的俘能效果,取α=0.1、0.3、0.8,分别对应系统出现双稳态、三稳态和单稳态的情况,采用龙格-库塔法对式(6)进行数值求解。若无特殊说明,初始值均为[0 0 0]。
文中,我们主要介绍比特币系统中涉及的相关密码技术,包含签名、哈希函数以及区块链技术。尤其是区块链技术,以链状结构存储数据,以密码技术为数据传输提供机密性和认证性服务,从而形成一条分布式存储、无法篡改、永无止息的数据库。但比特币等诸多数字货币在一定程度上具有匿名性,使得监管问题日益严峻,如何在保护实体隐私的同时实施有效的监管是数字货币领域的一大挑战。另一方面,由于区块链技术能摆脱第三方机构制约,使得它不再局限于数字货币领域。目前,区块链技术在金融服务、公共服务和IoT等领域的应用尚处于探索阶段,有待进一步发掘。
Ω=0.2时,系统对应3个不同α时的时域图和相图,如图4所示。由图可见,当α=0.3时,系统做大幅阱间运动,而α=0.1、0.8时系统只做小幅阱内运动。

图4 Ω=0.2时系统响应图
Ω=1时系统的时域图和相图如图5所示。α=0.1、0.3时系统能越过势垒保持大幅周期运动状态,而α=0.8时系统只在其平衡点附近做小幅周期运动。

图5 Ω=1时系统响应图
Ω=1.8时,与Ω=1时的情况相反,α=0.1、0.3时系统保持小幅运动,而α=0.8时系统做大幅周期运动,如图6所示。
现对不同稳态下系统的俘能特性进行讨论。
系统处于双稳态的α=0.1时,系统随激励频率变化的Vrms和位移绝对值最大值|x|max如图7所示。由图可看出,在频率较低时,尽管|x|max较大,但系统俘能特性不稳定。由图4~6可看出,此时系统被限制在势阱内做小幅阱内运动,虽然振动位移大,但俘获电压较小。而当外激频率增加时,系统均方根电压出现波动后平稳增加,在频率较高处出现断崖式下跌。由图7可看出,频率较高时,系统的|x|max变化趋势与均方根电压类似。
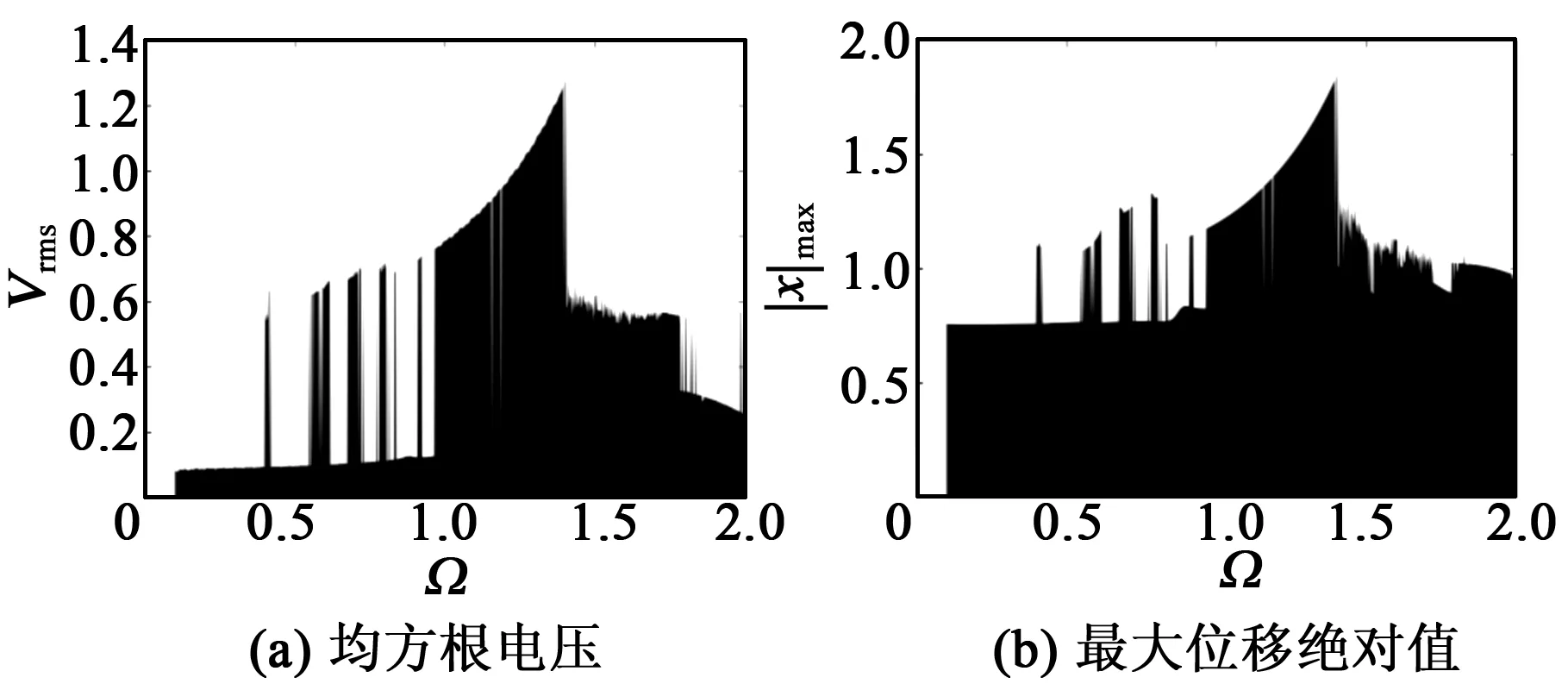
图7 α=0.1时系统俘能特性的变化
系统处于三稳态的α=0.3时,系统随激励频率变化的Vrms和|x|max如图8所示。在频率较低处时,系统的俘能特性较高。与α=0.1时相比,系统的有效工作带宽和低频俘能性能均得到增强。此时系统的Vrms与|x|max基本成正比关系。

图8 α=0.3时系统俘能特性的变化
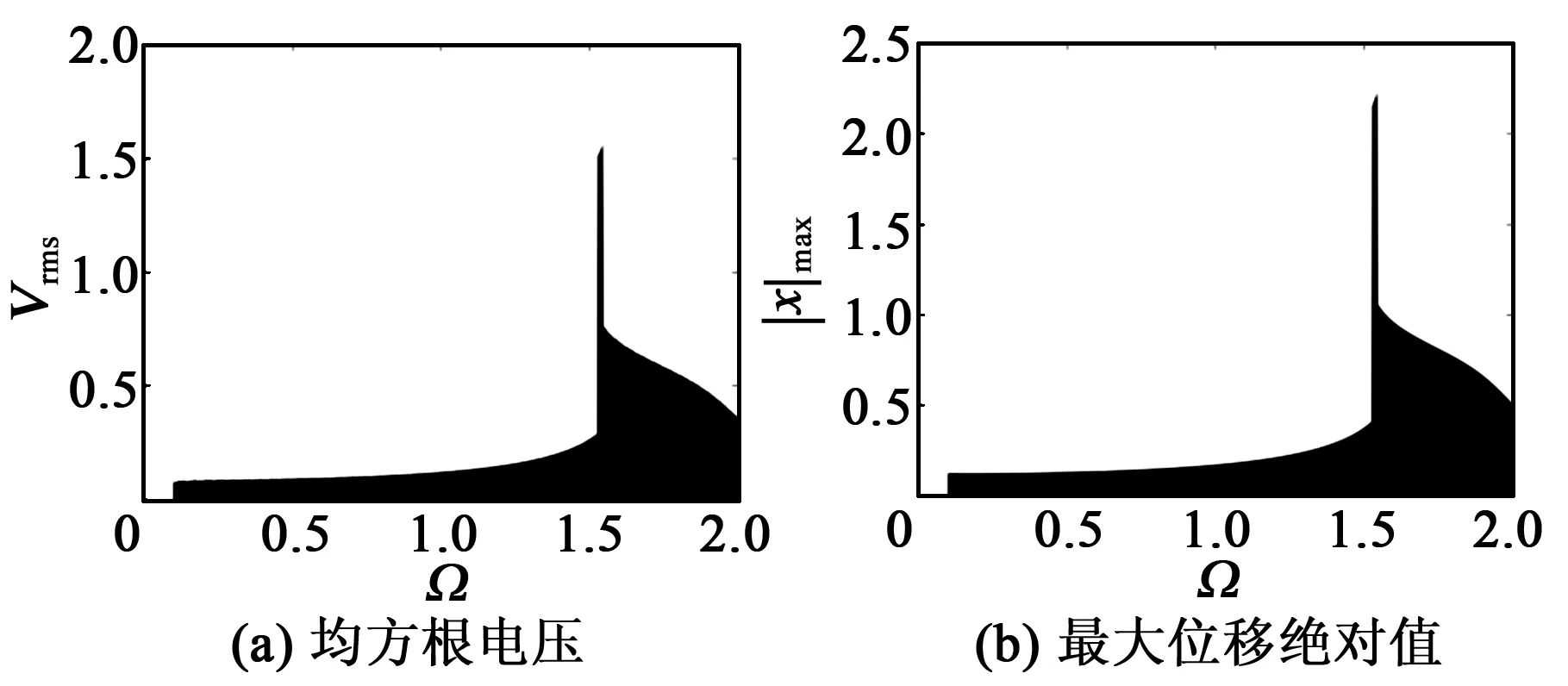
图9 α=0.8时系统俘能特性的变化
4 随机激励下俘能器的运动与俘能特性
本节研究高斯白噪声随机激励下系统的俘能特性,系统参数与第3节相同。
根据文献[15]得到由独立单位正态随机序列ζk模拟的高斯白噪声信号,即
(10)
式中:D为噪声强度;Δt为时间间隔;randn(1,N)为N个符合正态分布的随机数。
将式(6)写成欧拉差分格式,对系统进行求解,研究不同噪声强度对系统运动特性的影响。
取噪声强度D=0.008。当α=0.1时,系统被限制在势阱内做小幅阱内运动,系统的时域图及相图如图10所示。当α=0.3时,系统能越过势垒,在3个平衡点间来回跳跃,做大幅阱间运动,系统的时域图及相图如图11所示。当α=0.8时,系统在平衡点附近做混沌运动,系统的时域图及相图如图12所示。

图10 α=0.1时系统响应图(D=0.008)

图11 α=0.3时系统响应图(D=0.008)
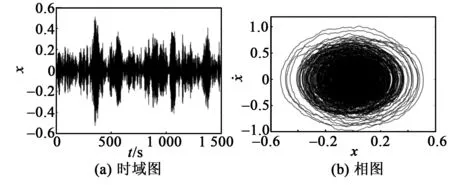
图12 α=0.8时系统响应图(D=0.008)
取噪声强度D=0.02。当α=0.1时,系统此时能越过势垒,但其阱间运动发生的频率较低,系统的时域图及相图如图13所示。当α=0.3时,系统仍能做阱间大幅运动,同时阱间运动发生的频率比D=0.008时增加,系统的时域图及相图如图14所示。当α=0.8时,系统在平衡点附近仍做混沌运动,但大位移振动发生的频率也明显增高,系统的时域图及相图如图15所示。

图13 α=0.1时系统响应图(D=0.02)
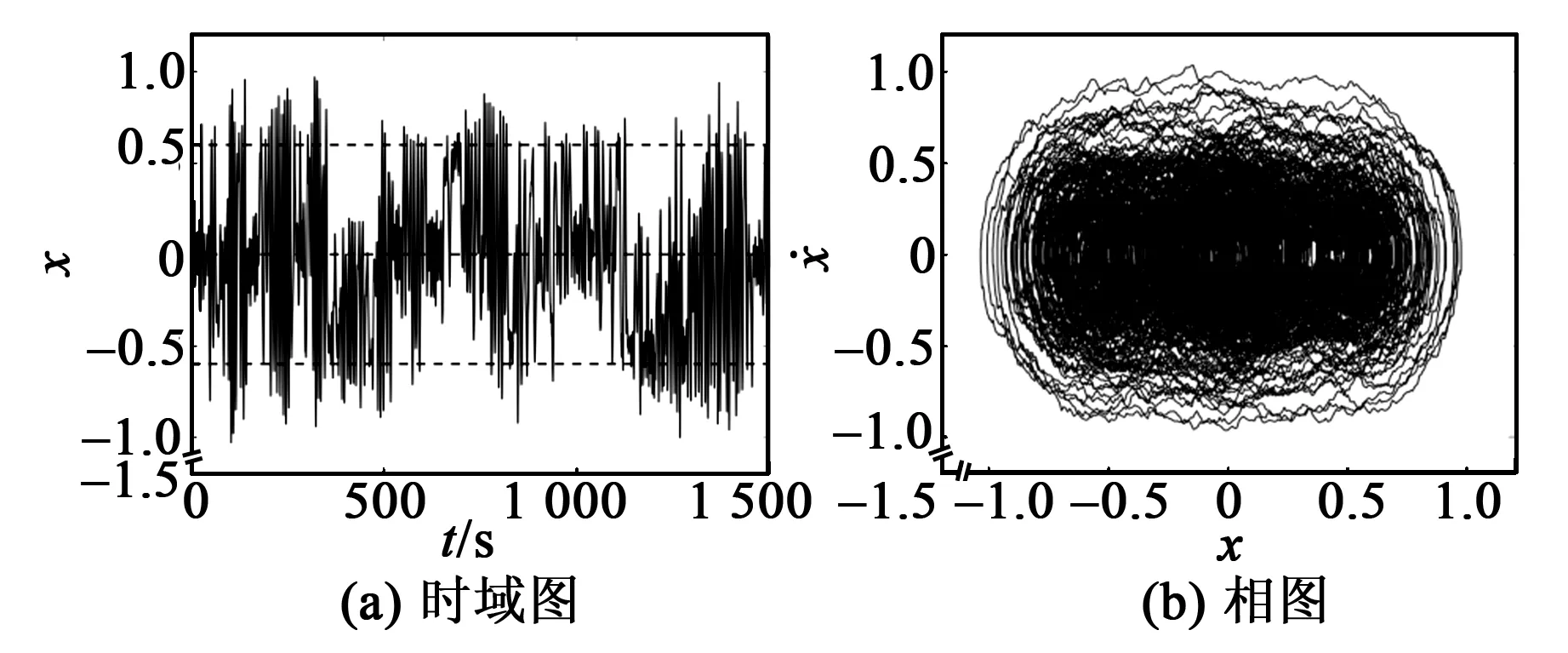
图14 α=0.3时系统响应图(D=0.02)

图15 α=0.8时系统响应图(D=0.02)
图16为随D变化时系统Vrms变化情况。由图可知,当D较低时,α=0.3时系统具有更好的俘能效果;随着D增加,Vrms也随之增加,α=0.1时系统的Vrms与α=0.3时近似相等;而α=0.8时系统的俘能效果较差。总之,在随机激励情况下,三稳态系统比其他稳态系统具有更好的俘能特性。

图16 均方根电压
5 结论
本文提出了一种机械式多稳态压电俘能器装置,利用集中参数法建立了系统的动力学方程,并对其进行了势能函数分析。研究了在简谐激励和随机激励下此系统处于不同状态下的运动和俘能特性,得出以下结论:
1) 弹簧的刚度和位置参数决定了系统的稳态性能,通过调节弹簧的安装参数,可实现系统的多稳态转换。
2) 简谐激励下,当环境的振动频率较低时,三稳态系统具有绝对的优势;随着频率增加(Ω>1),双稳态系统的俘能性能略高于三稳态系统俘能性能,双稳态系统的峰值均方根电压为1.272,而三稳态系统的峰值均方根电压为1.095。在高频环境中(Ω>1.5),单稳态系统具有比较高的俘能性能。
3) 随机激励下,三稳态系统的阱间运动噪声强度阈值较低,而Vrms较高,且随着噪声强度D的增加,Vrms也会增加。
猜你喜欢
——《势能》
文化纵横(2022年3期)2022-09-07
上海师范大学学报·自然科学版(2022年3期)2022-07-11
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
力学与实践(2022年2期)2022-04-28
中学生数理化·八年级物理人教版(2021年6期)2021-11-22
中学生数理化·八年级物理人教版(2019年6期)2019-06-25
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
中国机械工程(2015年13期)2015-12-16
振动、测试与诊断(2014年6期)2014-03-01
