
一种磁吸附式微小型惯性粘滑运动平台研究
2019-10-22 09:27钟博文王振华孙立宁
压电与声光 2019年5期
刘 彬,钟博文,王振华,孙立宁
(苏州大学 机电工程学院,江苏 苏州 215000)
0 引言
惯性粘滑驱动以其运动范围大,分辨率高,集成度高及运动速度快等优点,在显微系统、光学调整、微纳操作系统及微装配系统等领域获得了广泛的应用[1-5]。目前,国内外对设计惯性粘滑驱动结构已有研究成果。温建明等[6]提出了一种通过控制机构与支撑面之间的摩擦惯性粘滑运动机构,机构主体尺寸为25 mm×25 mm×20 mm,步长分辨率为7.5 μm,最大负载可达200 g。Attocube System公司[7]研发的单自由度运动平台,总体尺寸为24 mm×24 mm×11 mm,行程范围为0~5 mm,最大运动速度为3 mm/s,最小分辨率为10 nm。李宗伟[8]设计了一种使用O型圈来调节摩擦力的惯性粘滑平台,总体尺寸为30 mm ×28 mm ×25 mm,平台分辨率达到4 nm,最大运动速度为14 mm/s。于淼[9]研究了一款基于调节螺栓与O型圈相结合的摩擦力调节的运动平台,水平方向单自由度样机尺寸为24 mm×24 mm×16.5 mm,正、反向最大运动速度可达2.7 mm/s和2.0 mm/s。通过对前人的结构设计总结分析发现,目前样机的结构设计存在结构整体尺寸偏大问题,限制了惯性粘滑运动在小空间的应用。本文在惯性粘滑驱动原理基础上设计了一款运动平台,通过优化质量配比,在保证运动平台高精度的同时,整体尺寸较小,在小空间内能实现高精度位姿调整。
1 惯性粘滑运动平台结构设计
通过对惯性粘滑原理的分析,压电陶瓷致动器用于提供微位移,滑块通过摩擦界面动静摩擦的状态变化实现“粘”与“滑”的状态。为了优化样机整体尺寸,本文设计的小型惯性粘滑运动平台采用无导轨式的设计,主要由外框架、底板、吸铁石和压电陶瓷等组成,如图1所示。
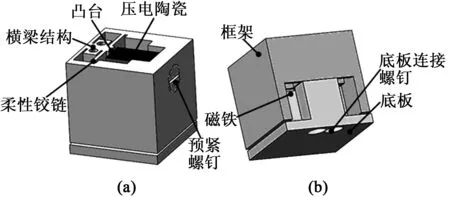
图1 平台结构三维模型图
图1中,外框架将惯性部分、柔性铰链和滑块部分通过集成方式减小了整体尺寸,其中惯性部分与滑块部分的相对运动依靠柔性铰链的变形来实现。预紧螺钉给压电陶瓷提供了一定的预紧力,起到固定与保护压电陶瓷的作用。将吸铁石粘贴在外框架内部,在提供吸附力的同时,能增大惯性部分质量。凸台结构是为了避免压电陶瓷端面对柔性铰链变形造成干涉,影响惯性粘滑运动性能。安装压电陶瓷的空间除了要考虑其自身的体积,还要考虑其焊点与输出线的尺寸。因此,选择阶梯式空间是便于加工与安装。结构底板使用碳钢材料,摩擦界面进行抛光处理,尽可能保证摩擦的一致性。
2 柔性铰链的优化与平台性能的分析
2.1 柔性铰链的优化
柔性铰链[10-11]以其具有无回程间隙、无机械摩擦等优点而被广泛应用于实现微小位移运动,微小转动等高精度定位中。在惯性粘滑运动中,为了实现无间隙传动与传递压电陶瓷的直线运动,且保证压电陶瓷输出位移的方向性,本文选择使用双平行板直梁型柔性铰链。
柔性铰链作为传动机构,其结构设计对惯性粘滑运动平台至关重要。为了方便结构的建模与分析,将中间部分看作刚体,如图2所示。图中,h,t,l分别为双平行板柔性铰链的宽度,厚度和长度,力F为压电陶瓷的安装位置,产生的位移与力通过柔性铰链进行传递。

图2 平行板柔性移动副力学模型
根据挠曲轴微分方程:
(1)
式中:w为在F作用下的位移量;M(x)为F作用下的弯矩;I为铰链截面的惯性矩;E为材料的弹性模量。
直梁AB在外力F/4作用下,端面B的转角:
(2)
直梁AB在力矩M作用下,端面B的转角:
(3)
在基本静定系下,端面B的转角为0,因此在端面B变形的协调条件为
θ1+θ2=0
(4)
因此,端面B铰支约束作用于直梁的力矩为
(5)
直梁AB的端面B挠度为
(6)
式中I=ht3/12,则平行板柔性铰链的水平刚度为
(7)
2.2 柔性铰链的有限元分析
为了能够对柔性铰链的性能有更深了解,本文使用有限元分析软件Simulation对其进行分析与校核。首先,使用SolidWorks软件绘制成三维模型图,导入到Simulation软件中进行网格划分。然后按照惯性粘滑运动平台的实际运动情况添加约束,并添加外力载荷或位移来代替压电陶瓷的实际输出力或输出位移量。最后通过有限元分析获得惯性粘滑运动平台中柔性铰链的刚度、强度和固有频率等参数。
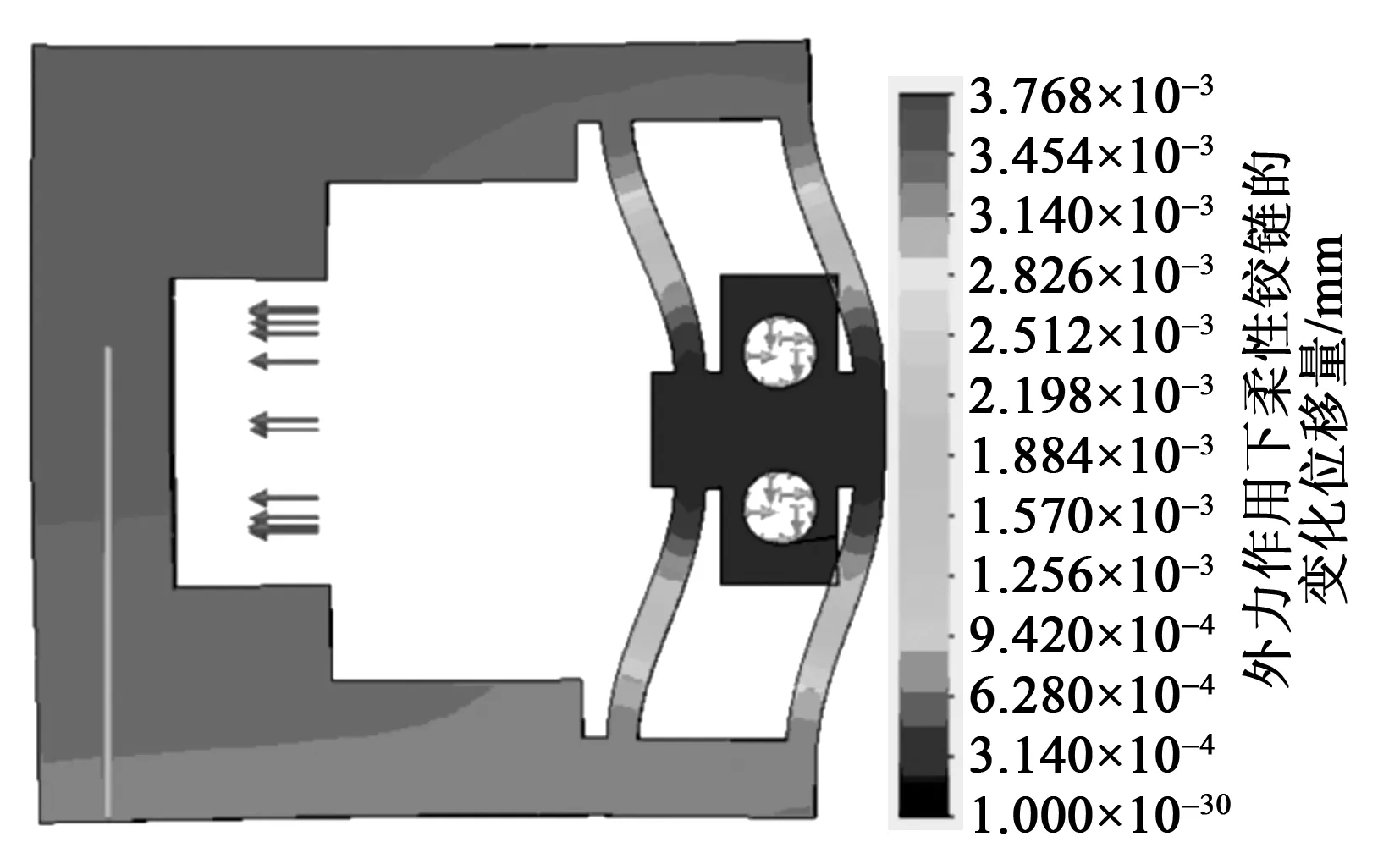
图3 柔性铰链刚度校核图
通过理论计算与有限分析的结构进行综合分析,柔性铰链最终尺寸:l=3.25 mm,t=0.4 mm,h=5 mm。经过理论分析计算,该尺寸下柔性铰链刚度为7.233 N/μm。有限元分析是将横梁结构添加约束,使用25 N外力代替压电陶瓷输出力,校核得到刚度为6.635 N/μm,对比有限元分析柔性铰链的变形量与理论计算柔性铰链的变形量相差8.27%,验证了理论分析的正确性。
3 实验及验证
3.1 实验系统搭建
测试惯性粘滑运动平台的性能,利用CapaNCDT6300电容测微仪测量滑块的微小位移。由于电容测微仪量程范围有限,为了使数据更具说服力,每个数据点测量30次,取平均值。驱动机构的测试系统组成如图4所示。
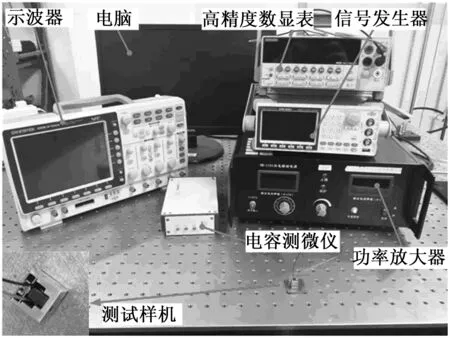
图4 测试系统图
3.2 步长重复性测试
惯性粘滑运动具有纳米级分辨率,毫米级行程,因此,在高精度操作领域有广泛应用,而步长重复性是评价样机精度的重要指标。
测试时,驱动电信号幅值为150 V,频率为2.5 kHz,取往复步距10个数据点绘制图表,结果如图5所示。正向运动的步长平均值为2.984 μm,极差为0.34 μm,方差为0.118 4 μm,反向运动的步长平均值为2.349 μm,极差为0.32 μm,方差为0.105 4 μm。由图5可看出,样机具有良好的位移重复性,且样机正、反向位移量不同,这是由于复杂的摩擦状态引起的。
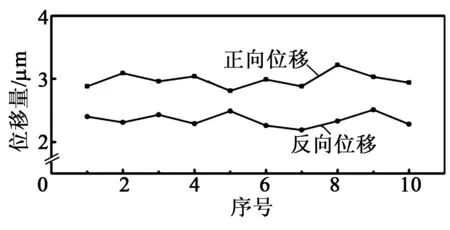
图5 步长重复性测试
3.3 运动速度测试
运动速度是样机性能指标的重要参数。图6为不同电压幅值下的运动速度。图7为不同驱动频率下的运动速度。由图7可看出,平台最大运动速度为4.966 mm/s。运动速度是由单步位移与驱动频率匹配得到的,当驱动频率提高时,由于滑块在“粘”状态转变成“滑”状态,导致单步位移减小,所以导致运动速度与驱动频率呈现倒U曲线关系。

图6 不同电压幅值下的运动速度
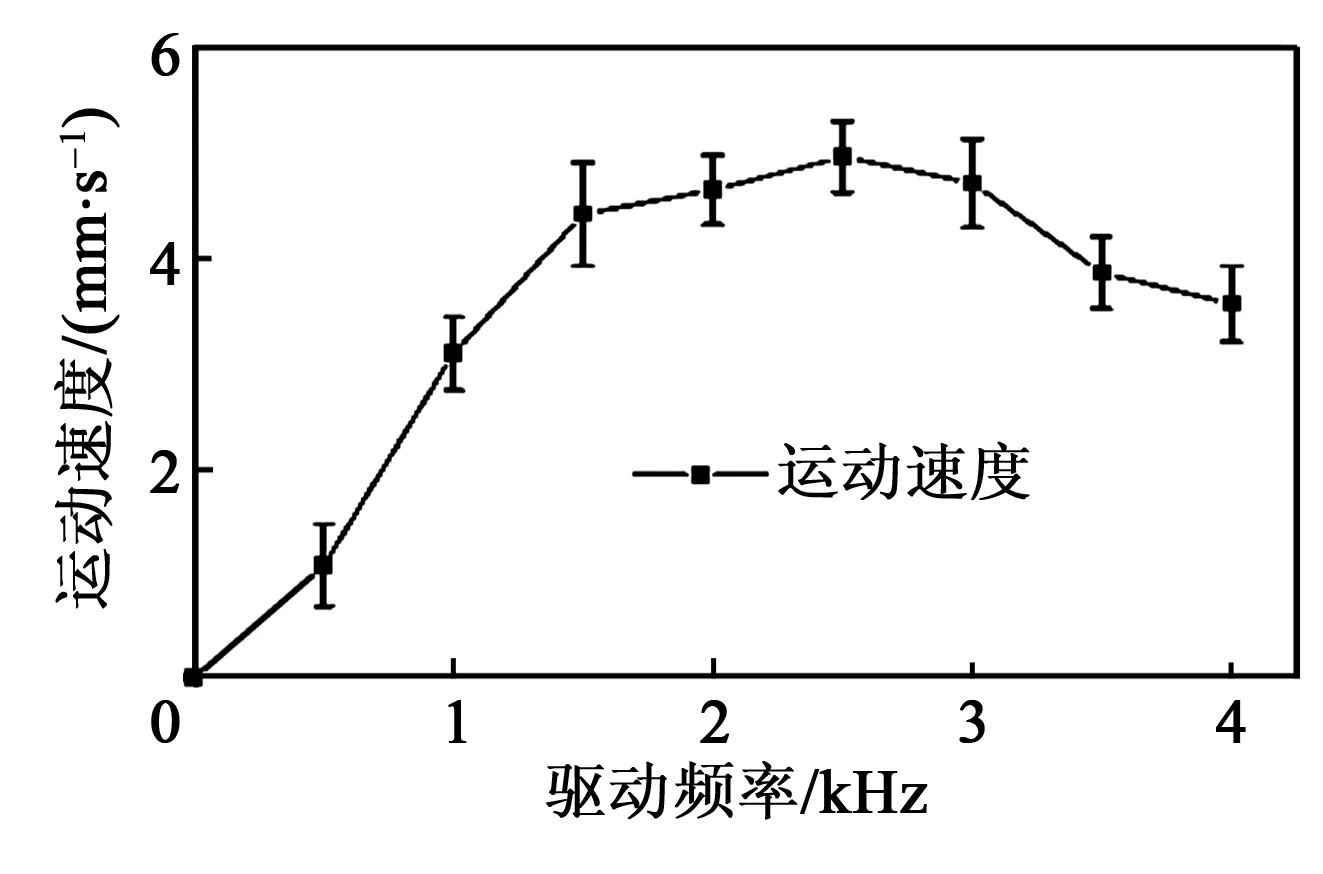
图7 不同驱动频率下的运动速度
4 结束语
本文设计了一款体积仅有10 mm×10 mm×10 mm的微小型惯性粘滑运动平台,能够满足在狭小空间内实现高精度的位姿调整。搭建实验测试系统结果表明,运动平台的正、反向单步位移分别为2.984 μm和2.349 μm,步长重复性好,水平方向最大的运动速度为4.966 mm/s,竖直方向上运动速度可达2.1 mm/s,能实现快速的位姿调整。通过对该平台的研究,为小体积的多自由的平台设计提供了指导。
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
民用飞机设计与研究(2019年2期)2019-08-05
压电与声光(2019年1期)2019-02-22
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
铜仁学院学报(2018年6期)2018-07-05
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
CHIP新电脑(2014年5期)2014-05-14
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
