
一种大容性负载的压电陶瓷驱动电源设计
2019-10-22 09:27张文涛熊显名
压电与声光 2019年5期
钱 存,张文涛,杜 浩,熊显名
(桂林电子科技大学 广西光电信息处理重点实验室, 广西 桂林 541004)
0 引言
随着光刻技术的迅速发展,所需定位精度经微米级到亚纳米级,再由亚纳米级至低于纳米级的定位精度,纳米级以下的定位已成为高精度定位的难点之一[1]。压电陶瓷作为微定位系统的促动装置,具有分辨率高,刚度大,能耗低,温度响应小及无机械摩擦等优点,广泛应用于精密定位系统中。然而对于大容性的压电陶瓷促动器,其对电源性能的要求较高。常用的电源因为元件数多,电路易发生振荡,影响压电陶瓷的线性位移控制,因此,大容性负载的压电陶瓷驱动电源的设计对光刻技术的发展有重要的价值。
1 驱动电源结构与指标
1.1 驱动电源结构
图1为压电陶瓷驱动电源[2]结构。模拟信号生成电路:将微处理器(MCU)输出的数字信号经D/A转换器(DAC)转换为模拟信号后滤波;功率电源电路为各元件提供稳定的电压电流;滤波后0~5 V模拟信号经线性稳压放大电路放大为0~100 V稳定可控的电压信号,以驱动压电陶瓷。

图1 驱动电源结构框图
1.2 驱动电源指标
在微位移系统中,微位移的定位频率为1 kHz,采用的压电陶瓷促动器型号为Pst150/3.5*3.5/7。等效静态电容为0.35 μF,在最大驱动电压100 V时行程为7 μm,为使定位精度达0.3 nm,驱动电压输出分辨率应不大于4 mV。压电陶瓷促动器为容性负载,要求电源具有良好的瞬时电流驱动能力[3]。压电陶瓷等效电阻为
(1)
式中:f为微位移的定位频率;CL为压电陶瓷促动器的等效静态电容。此时,驱动电源所需峰值电流为
(2)
式中Umax为驱动电源的输出电压最大值。
为使驱动电源具有良好的动态效应,其压摆率应大于电路所需值[4]。压摆率ASR可由输出电压最大值和电压最大频率fmax得到,即
ASR=2πfmaxUmax=6.25(V/μs)
(3)
以上分析可得驱动电源的基本指标:
1) 实时电压调节能力(0~100 V)。
2) 输出电压频率0~1 kHz。
3) 输出电压分辨率≤4 mV。
4) 输出电流≥220 mA。
5) 压摆率ASR≥6.25 V/μs。
2 容性负载及稳定性分析
2.1 容性负载对稳定性的影响
高精度定位系统中,驱动电源应具有良好的稳定性与动态性[5]。在运算放大器中,由开环曲线判断系统的稳定性能,如图2所示。当压电陶瓷作为负载时会在开环增益曲线上增加一极点fz,使曲线在极点处以二十倍频下降,将会对电路的稳定性造成影响[6]。
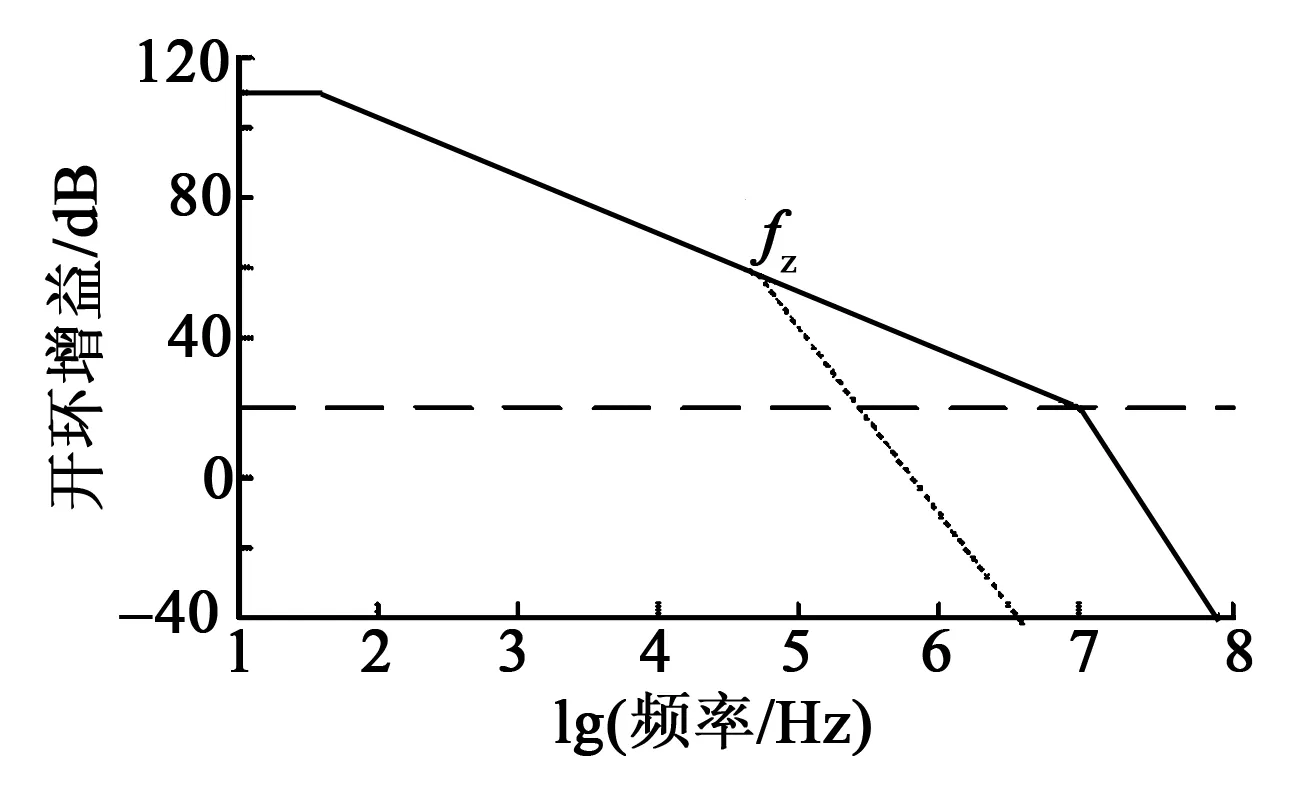
图2 容性负载极点
压电陶瓷促动器作为动能器件,具有较大的电容性[7],而大电容会使极点频率变小,使二十倍频曲线更早出现,对电路危害极大。由压电陶瓷的静态电容CL和电源频率可得极点的频率为
(4)
极点在fz处开环曲线以二十倍频速率下降,其穿过20 dB的频率小于1 MHz,系统将会发生震荡,需要对系统进行相位补偿。
2.2 超前反馈补偿
为解决容性负载对电路的影响,采用电容超前反馈对负载引起的极点进行补偿,其补偿方式如图3所示。图中,Rf为隔离电阻,Cf为反馈电容,CL为压电陶瓷等效电容,且CL=0.35 μF,R0为放大器的输出电阻,且R0=7 Ω。

图3 电容超前反馈
超前反馈与负载共同作用将产生1个零点fz1和1对极点fp1、fp2,分别为
(5)
(6)
(7)
令fz=fp1,零点和低频极点抵消,可消除极点对电路的影响,此时:
RfCf=(R1//R2)CL
(8)
取Cf=220 μF,Rf=10 Ω,R1=10 kΩ,R2=90 kΩ,得到电源系统的新极点为
(9)
当fp大于系统的带宽增益时,即极点引起的开环曲率下降位置晚于系统带宽需求,此时系统开环曲线在20 dB以上,系统稳定。
2.3 运放的相位补偿
线性放大电路采用负反馈系统,由于负反馈放大电路易发生相移造成振荡,应对线路进行相位补偿[8]。查PA92手册可知,放大电路采用外接电容方式进行相位补偿。当闭环增益不小于12 dB时,采用10 pF的电容补偿,系统增益将有2 MHz的带宽,相位裕度约为60°,满足电源设计需求。
3 放大电路设计
3.1 线性放大电路的选择
线性放大需稳定电压和大电流输出,选用PA92为运放单元。PA92是APEX公司生产的一款输出电压可达390 V,输出电流达4 A的高精度运算放大器[9]。其大功率输出能力适用于大容性负载的驱动任务,且PA92是运算放大和功率放大相结合的产品,减小了体积,同时可安装散热装置,使运放能长期稳定工作。PA92运放的失调电压为10 mV。实际需求失调电压为
(10)
式中:Re为驱动电源分辨率;A为运放放大增益。
PA92的失调电压10 mV大于实际需求的最小失调电压0.2 mV,单独作用放大不能满足精度需求,选用双极放大结构减小系统的输入失调电压[10],其结构如图4所示。

图4 双极放大电路
线性放大电路采用复合双极放大负反馈电路。复合反馈双极电路的失调电压主要由前级运放的输入失调电压决定[7],为降低线性放大电路的失调电压选用高精度放大器OP07A作为驱动电路的前级放大。OP07A最大失调电压为25 μV,远小于所需的0.2 mV,满足精度需求。
3.2 线性放大电路
图5为驱动电压的线性放大电路。图中,R1、R2、R3、R4为比例电阻,Rf、Cf分别为补偿电阻电容,Cc为相位补偿电容,C9为环路增益修复电容。在0~5 V模拟信号输入下,OP07A将电压放大1倍至0~10 V,后经PA92放大10倍至0~100 V驱动压电陶瓷,线性放大电路的总放大增益为20。根据输出电压峰值由功率电源电压决定[7],OP07A采用±15 V稳压电源得到输出电压峰值10 V,PA92采用+120 V、-15 V稳压电源,得到0~100 V的输出电压。RCL使用1 W高精密电阻,且
(11)
式中IL为功放限流值。采用3Ω功率电阻将电流限制在220 mA,满足大电流输出能力。

图5 线性放大电路
4 电源驱动能力测试
设计驱动电源后,按照电源性能需求对性能进行测试,以确定电源的线性度和灵敏性。因精密定位控制需要电源具有良好的阶跃性能和动态稳定性,对驱动电源的测试包括阶跃响应测试、动态响应和线性误差测试。
4.1 阶跃响应测试
驱动电源在高功率的输出中,需要有良好的输入、输出线性比,因此需要对输出电压做阶跃响应测试。在频率1 kHz使用驱动电源时,其阶跃响应应小于1 ms。测试输入信号在0时刻输入1 V的阶跃信号,测得响应电压曲线如图6所示。由图可知,响应电压放大20倍,信号平稳上升,达到20 V时曲线无超调。电源阶跃响应速度快,在100 μs内达到稳定状态,满足驱动设计要求。

图6 驱动电源阶跃响应
4.2 动态响应
驱动电源动态响应性能影响其在高频率使用下的电压性能。在补偿电容Cf定值下,需要对总环路电容C9进行调节。C9使用合适的电容可使驱动电源系统具有良好的动态跟随效果。
C9=150 pF时,设定微处理器的输出信号经D/A转换为1 kHz正弦信号后,其电压峰值为0.5 V,直流偏置为0.5 V。测得电源的输出波形如图7所示。由图可知,输出电压在0~20 V为平稳正弦信号,无相移,动态跟随效果良好,波形平滑。
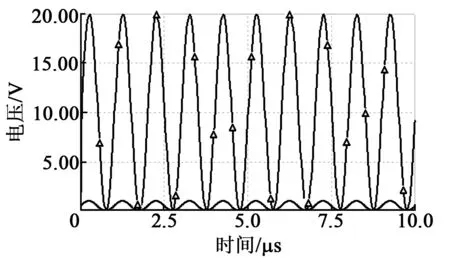
图7 驱动电源的动态响应
4.3 电压输出精度
为测试驱动电源的电压输出精度,将0~5 V输入信号设置为1 000频点/s上升,得到输入电压与驱动电源的输出信号如图8所示。由图可知,系统输出电压的线性度良好,无波动。
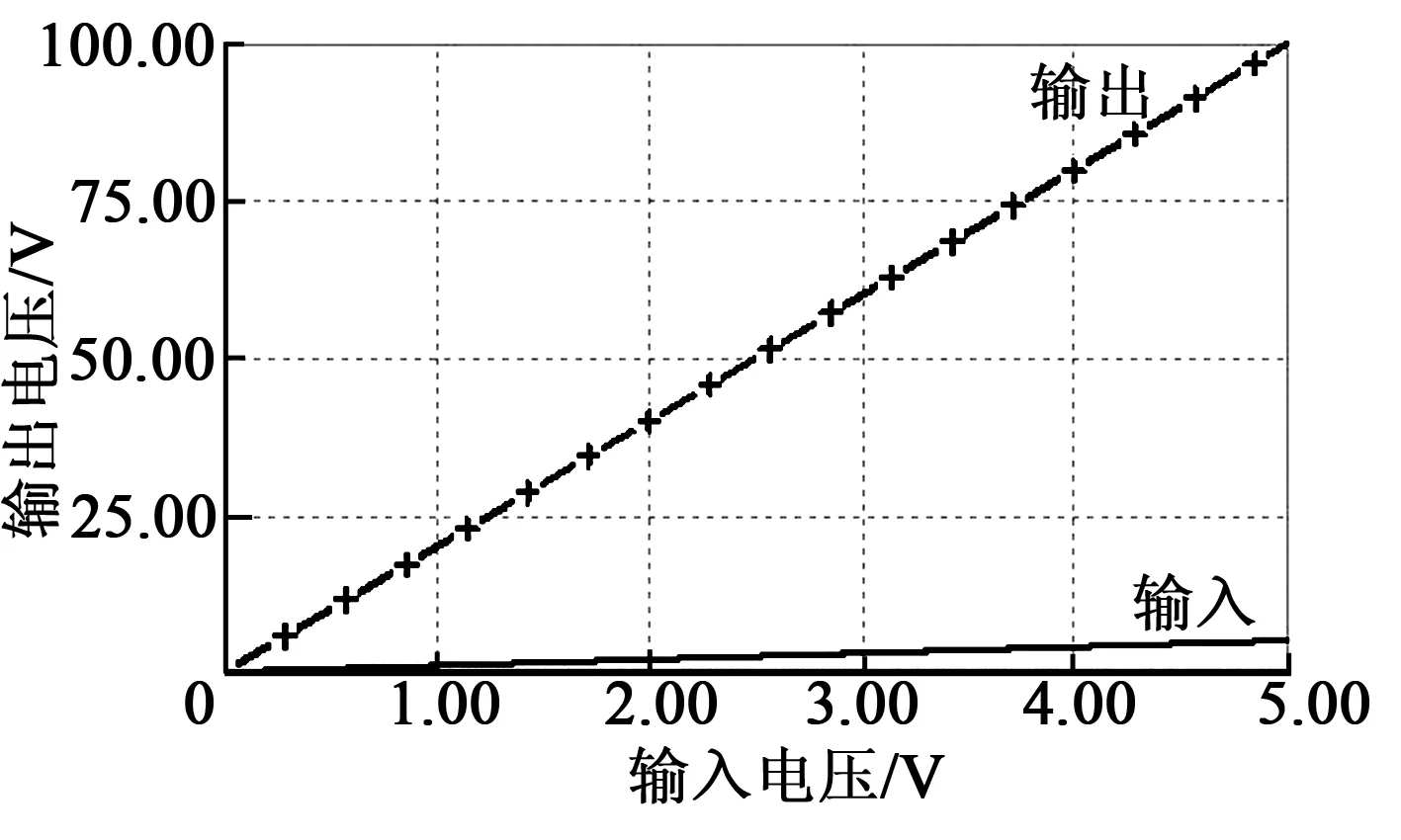
图8 驱动电源输入输出关系
为测量输出电压信号的线性误差大小,对以上结果随机抽取8组输入电压进行测试,对其输出电压采用高精度电压表测量,每组结果分10次进行测量,取测量结果平均值,得到数据如表1所示。由表可知,在0~100 V输出过程中线性度稳定,且输出电压误差均小于0.5 mV。
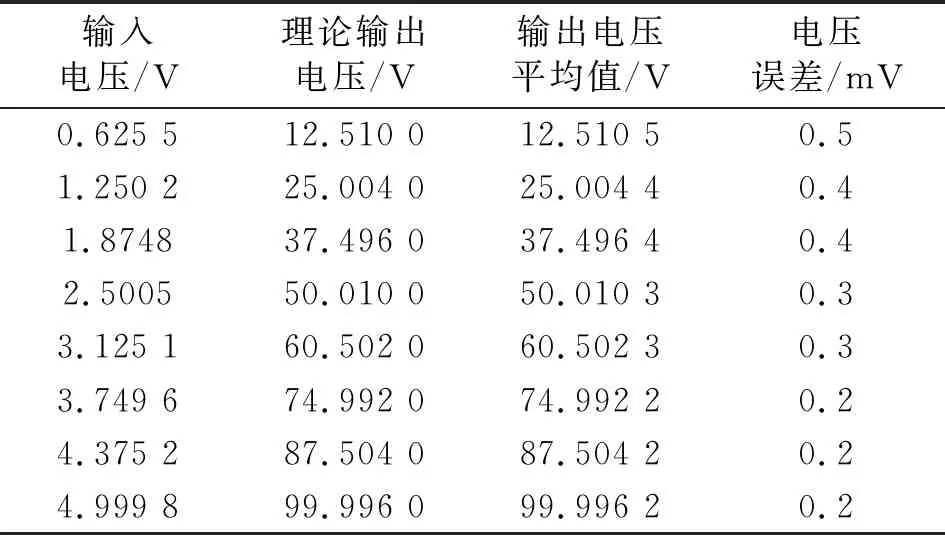
表1 输出误差测试
5 结束语
本文对大容性负载电路进行稳定性分析,对负载补偿方式和影响动能因素进行分析,并对电源系统的高精度输出能力进行分析。提出了采用电容超前反馈与相位补偿相结合的方式,采用双极线性放大方法。经过实验验证表明,电源系统具有良好的大电流驱动能力,在输出精度与动态响应上有良好的效果。驱动电源精度稳定,动态响应快,输出电流大,满足驱动压电促动器在微位移系统中的应用。
猜你喜欢
河北电力技术(2022年5期)2023-01-18
通信电源技术(2021年13期)2022-01-10
压电与声光(2019年1期)2019-02-22
天津教育·下(2018年9期)2018-07-13
铜仁学院学报(2018年6期)2018-07-05
现代建筑电气(2018年5期)2018-06-11
自动化仪表(2017年8期)2017-08-30
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
探测与控制学报(2012年1期)2012-08-27
