
X波段雷达对海探测试验与数据获取
2019-11-02 03:40刘宁波董云龙王国庆陈小龙
雷达学报 2019年5期
刘宁波 董云龙 王国庆 丁 昊 黄 勇 关 键 陈小龙 何 友
(海军航空大学信息融合研究所 烟台 264001)
1 引言
在复杂的海洋环境中,海用雷达在探测舰船、掠海飞行器、航道浮标、渔船、小型游艇、浮冰等军用和民用目标时,不可避免地会受到海面散射回波即海杂波的影响。尤其在高分辨率雷达、高海况工作条件下,海杂波中频繁出现尖峰现象,且整体能量较强,在时域中与目标回波十分相似,而在频域中又具有较宽的谱宽,易引起虚警,严重影响海上目标检测。因此,贴近实际应用场景,基于实测数据开展海杂波特性研究,并有针对性地研发海杂波抑制和目标检测技术,提升海用雷达目标探测能力,是一个探索性强且难度很大的瓶颈技术问题,也是当前研究的难点和热点问题[1–3]。
海杂波特性研究方法主要可归纳为两类,一类是基于海面几何模型和电磁散射理论开展海杂波形成机理与散射计算方面的研究,另一类是从试验实测角度,获取海面散射回波实测数据,修正现有理论或发展新理论。其中,从试验角度的研究方法是一种贴近实际环境且被广泛采用的研究方法,其与从理论计算角度的研究方法相互补充、相互印证。试验实测数据的特性与雷达设备密切相关,因此,基于试验实测的研究方法可以将具有一定普适性的理论计算研究结果与特定装备的特定使用场景结合起来,有针对性地进行优化完善,推进海杂波特性研究成果的实际应用,并可有力地支持MTI/MTD、变换域处理、检测前跟踪(Tracking Before Detection,TBD)、恒虚警(Constant False Alarm Rate,CFAR)处理等杂波抑制和目标检测技术研究[4,5]。这里提及的试验实测数据,称为“信息全记录的海杂波测量数据”,即除了包含海杂波数据、目标回波数据等雷达数据之外,还应包括海洋环境数据(如浪高、浪向、风速、风向、温度、相对湿度等)、目标实时位置数据(尺寸或RCS、经纬度或距离方位、航速、航向、实时运动状态、运动轨迹等)、雷达工作参数(如雷达位置、架高、频段、重频、距离/方位分辨率)。这些信息应规范详细记录并与雷达数据关联,使得与数据相对应的试验场景可重演,确保雷达数据具有较高的应用价值。
由公开文献可知,为支持海用雷达装备研制和海上目标探测能力提升,国内外进行了丰富多样的雷达海杂波测量试验[6]。国外方面,比较典型的有美国海军研究实验室的四频率(P,L,C,X)机载雷达海杂波测量实验[7]、美国海军与美国国防部高级研究计划署的“山顶计划”[8]、加拿大McMaster大学的X频段IPIX雷达海杂波测量试验[9,10]、南非科学和工业研究理事会(Council for Scientific and Industrial Research,CSIR)的X频段Fynmeet雷达海杂波测量试验[11,12]、西班牙南海岸Ka频段雷达海杂波测量试验[13]、澳大利亚国防科技署(Defense Science and Technology Organization,DSTO)的L频段多通道海杂波实验[14–16]等;国内方面,多家雷达相关科研院所也开展了多种条件下海杂波测量试验[6,17–30],获取了不同雷达平台下大量海杂波数据,并在特性分析建模、多域特征提取等方面开展了大量的研究工作[31–41]。但鉴于军事及技术保密等原因,大多数雷达海杂波数据集均未公开,仅有加拿大McMaster大学的X波段IPIX雷达海杂波测量试验数据集、南非CSIR的X频段Fynmeet雷达海杂波测量试验数据集可以公开获取。
IPIX雷达数据集在海上目标探测研究领域被熟知,其由加拿大McMaster大学Haykin教授科研团队[9,10],于1993年和1998年,分别在加拿大新斯科舍省南部城市Dartmouth和安大略湖畔Grimsby开展了2次海杂波测量和海上漂浮小目标探测试验,是典型的岸基平台小擦地角雷达数据。Fynmeet雷达数据集是CSIR为支持海上小目标监视系统研发,于2006年和2007年,分别在南非西南海岸线利用试验雷达开展了2次为期19天的海杂波与目标船回波数据测量试验,该数据集在参数多样性和参数记录方面较为完整[11,12]。这两个公开数据集是针对特定目标和试验海域的,使用上具有一定的局限性,其可用于杂波抑制与目标检测方法的性能评估,但对于我国海域及特定目标的检测性能评估可能不准确。并且鉴于未知原因,目前CSIR数据集在其官方网站上已无法下载。
从海杂波特性和海上目标探测技术研究需求出发,借鉴加拿大McMaster大学的IPIX雷达数据集和南非CSIR的Fynmeet雷达数据集在数据采集和记录方面的成功经验,海军航空大学海上目标探测课题组推出一项“雷达对海探测数据共享计划”,旨在利用X波段固态全相参雷达分阶段分批次开展对海探测试验,获取多种条件下雷达实测数据和试验辅助数据,构建形成可以用于支持海杂波特性认知、海杂波抑制、海上目标检测跟踪与分类识别技术研究的数据集,分批次公开共享,为推进我国海用雷达装备技术进步和探测性能提升贡献力量。
2 岸基雷达海杂波测试方法
本试验利用岸基架设的X波段固态全相参雷达,获取海面的电磁散射回波,测量海面散射系数[42–45],用于研究海杂波随分辨率、入射方向和散射方向、海面环境特征等变化的规律,及海杂波的统计特性、频谱特性等。这里需特别说明的是,雷达观察对象并非仅针对海面(海杂波),还包括航道浮标、船只等海面目标,即获取的雷达实测数据包含两大类,即纯海杂波数据、海杂波+目标回波数据。
测量、记录被测海面的回波功率,通过定标建立被测海面的雷达散射系数与雷达视频电压测量值的对应关系。在实际测量中,利用这种对应关系,就可以由视频电压测量值确定被测海面的雷达散射系数,从而使得本试验数据与其他试验数据具备可对比性。本试验中主要采用外定标法,即采用己知雷达散射截面的定标体提供定标电平,定标方法如下[42]。
测出定标体的接收机输出功率Pr0(或Vr0),同一状态下再测出被测海面的接收机输出功率Pr(或Vr),则被测海面的散射系数σ0为

其中,σ0为被测海面的雷达散射系数,单位:dBm2/m2;σ表示雷达天线波束照射海面的雷达散射截面积,单位:m2;A表示雷达天线波束照射海面的面积,单位:m2;Pr被测海面的回波功率,单位:W;Pr0表示定标体的回波功率,单位:W;Rr表示被测海面到天线的距离,单位:m;R0表示定标体到天线的距离,单位:m;σ0表示定标体的雷达散射截面积,单位:m2;Vr表示被测海面的回波电压,单位:V;Vr0定标体的回波电压,单位:V。
定标精度主要决定于定标体雷达散射截面与海面散射截面的相对大小。定标误差表达式为

其中,σm表示定标体的被测雷达散射截面,单位:m2;σ0表示定标体的实际雷达散射截面,单位:m2;σb表示被测海面的雷达散射截面,单位:m2。要使误差限制在±20%以内(相当于±1 dB),必须控制σb/σ0≤10-2(相当于–20 dB)。
定标过程中,常用作定标体的有矩形平板、角反射器、龙泊透镜反射器、金属球等,这些标准体的散射截面积可以通过理论计算得到,详情请参见文献[42],本试验中拟主要采用金属球作为定标体,如图1所示。在海面放置定标体,需使定标体整体高于海面一定高度,不能淹没于水中,且需根据雷达架设位置和波束中心指向准确计算定标体放置地点,并通过多次测量求均值得到稳定的定标结果。

图1 不锈钢球定标体Fig.1 Stainless steel ball calibration body
实际上,对于实测海杂波统计分布特性、相关特性、多普勒谱特性、杂波抑制和目标检测等研究需求而言,主要关心的是雷达回波的相对幅度。若需研究海面散射系数以及不用波段、不同雷达之间测量情况差异,则雷达必须经过定标。
3 试验雷达、场地与数据获取
3.1 试验雷达介绍
本试验中所使用的雷达为X波段固态功放监视/导航雷达,主要用于船舶导航和海岸监视等场景,能清晰分辨多种量程下的各种目标,具有高距离分辨率、高可靠性、距离探测盲区小等特点,如图2所示。雷达采用固态功放组合脉冲发射体制(见图3),以提高距离分辨率,减小距离盲区,降低雷达辐射功率,发射时间为40 ns~100 µs,利用接收信号和发射信号的时差计算目标距离,水平面内360°全方位扫描。雷达技术参数如表1所示。
3.2 试验场地介绍
“雷达对海探测数据共享计划”所规划的对海探测试验是一系列试验,包含岸基和机载平台试验,在1~2年的时间内分期进行。
岸基试验场地位于山东烟台沿海区域的海上目标探测试验场,涉及3处不同海拔高度的试验地点,具备观察同一海域的地理条件,且各有特色,相互补充。
试验点1位于烟台的养马岛,试验场地距离海边的直线距离约50 m,海拔高度约30 m,雷达对海视野范围约180°,可测得明显海杂波数据的擦地角范围约为0.3°~15°,海面目标类型较为丰富,以中小型船只目标居多,具体如图4所示。

图2 X波段固态功放监视/导航雷达Fig.2 X band solid-state power amplifier surveillance/navigation radar
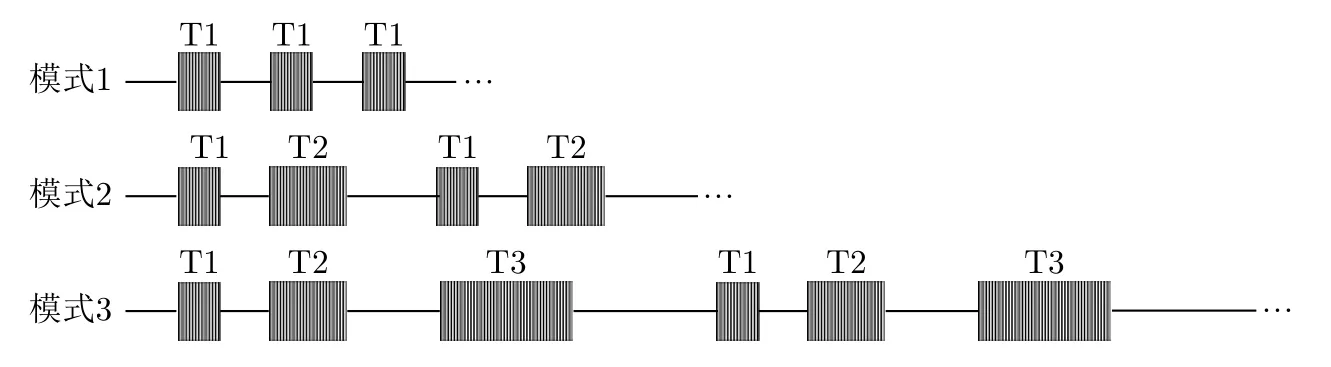
图3 组合脉冲发射的3种模式Fig.3 Three modes of combined pulse emission
试验点2位于烟台牟平区一座小山的面海一侧,试验场地距离海边的直线距离约500 m,海拔高度范围为60~120 m,雷达对海视野范围约180°,可测得明显海杂波数据的擦地角范围约为0.3°~6°,海面目标主要为近岸活动的小渔船,远距离处海面目标少,适合开展合作目标试验,具体如图5所示。
试验点3位于烟台芝罘区的岱王山,试验场地距离海边的直线距离约2200 m,海拔高度约400 m,雷达对海视野范围大于180°,可测得明显海杂波数据的擦地角范围约为1.2°~7°,海面目标类型最为丰富,大/中/小型船只众多,视野最为开阔,具体如图6所示。

表1 X波段试验雷达参数Tab.1 X-band experimental radar parameters

图4 对海探测试验点1俯瞰图Fig.4 Aerial view of experimental site 1 for sea detection
机载平台试验主要利用可在烟台空域执飞的4桨叶贝尔407GXi直升机(如图7所示)挂载试验型雷达,开展对海上目标探测试验,直升机飞行高度范围为500~4000 m,载重可达300 kg,单次飞行时间一般不超过2 h,最大航程675 km,最大巡航速度250 km/h。

图5 对海探测试验点2俯瞰图Fig.5 Aerial view of experimental site 2 for sea detection

图6 对海探测试验点3俯瞰图Fig.6 Aerial view of experimental site 3 for sea detection

图7 直升机载试验平台Fig.7 Helicopter experimental platform
2019年9月至10月期间开展的试验为第1期试验,本期试验主要在紧靠海边的试验点1开展试验,采集不同条件下雷达回波数据,含海杂波数据和海面船只目标回波数据。第2期和第3期试验将考虑海拔高度较高的试验点2、试验点3和机载试验平台。由于第1期试验所使用的雷达是岸基/船载使用的雷达,无法机载平台安装,所以第1期试验不涉及机载试验,在后续试验中会涉及。
3.3 雷达数据采集
数据采集使用课题组自研的HD-LD-CJ-10型便携式雷达采集设备,如图8所示。该采集设备由一台2U便携式加固工控机、采集板卡和上位机软件组成,采集板可实现14 bit量化,具备105 MSPS的峰值采样能力和80 MB/S的连续不间断存储能力,具有3路TTL电平信号、2收2发RS232信号、4收RS422信号接口,可用于接入试验辅助设备数据。上位机软件可实现自定义波门采样,并可按预先设定文件大小自动分割二进制数据文件,还可通过串行接口、网络接口记录AIS、雷达输出点/航迹等数据。

图8 HD-LD-CJ-10型便携式采集设备Fig.8 HD-LD-CJ-10 portable acquisition equipment
采集雷达信号时,根据触发信号进行波门采样。采集数据文件命名格式为20191008085830_staring/scanning(y/m/d/h/min/s/天线工作模式),天线工作模式包括staring(天线凝视某一方位)和scanning(天线圆周扫描)两种。所采数据的基本格式如图9所示,每个数据文件均由多个“脉冲组合”的回波数据依次排列组成(不同的雷达工作模式对应不同的脉冲组合,每个脉冲组合包含的发射脉冲数为1~3个)。每个脉冲组合的回波数据均由“数据头+回波数据”组成,数据头包含标志位、信息头长度、数据版本、脉冲重复周期、频率和计数、采样频率、数据来源与触发方式、方位码、数据丢失标志、波门开始时间和波门对应采样深度、UTC时间、雷达位置、雷达正北角、雷达工作模式、数据校验位等,回波数据长度可通过采集波门大小和采样深度计算,同时在数据头中也会明确一个脉冲组合中每个脉冲回波的采样点数。实测数据更为详细的说明,请见附录。

图9 雷达采集数据格式Fig.9 Format of radar acquisition data
雷达对海探测试验与数据采集的流程为:雷达架设于预设试验地点,每次开始试验前,通过风速/风向/浪高/浪向/天气现象预报和实时信息初步确定海况等级以及雷达凝视天线指向,雷达开机分别工作于天线驻留模式和圆周扫描模式,启动数据采集器记录数据,并同步记录AIS设备数据,其中驻留模式数据需持续2 min以上,圆周扫描模式数据需持续5 min以上,达到要求后停止采集,填写数据采集记录表,记录试验过程信息。按此流程重复5次以上,保证每次试验可获取不低于10组实测数据,并在现场通过采集器回放分析,检验数据有效性。
“雷达对海探测数据共享计划”第1期公开的数据,采用Matlab中的MAT数据格式,数据头信息和回波数据均可直接载入以便于使用数据。在后续几期试验中,随着数据类型和数据量的增加,为提高对不同类型雷达数据的兼容性,数据格式将采用国际通用数据格式,如NetCDF,HDF5等,并将配套专门的雷达数据管理与解析软件,实现对雷达数据的规范化管理。
3.4 试验辅助数据
雷达海杂波测试,十分重要的一个方面就是海洋环境数据的同步记录,一方面,形成“信息全记录的海杂波测量数据”可以在回放雷达数据的同时,重演当时的海洋环境基本信息;另一方面,可以推进海杂波特性、海杂波抑制和目标检测等技术研究的精细化。由于岸基雷达观测海域范围受视距限制,空间尺度范围相对较小,而同时通过海洋气象台站、卫星遥感等途径,海洋环境数据(如浪高浪向等)一般在较大空间尺度范围内预报或实时修正,限定到雷达观察的海域,其对应的海洋环境数据一般需通过建模和再分析等手段给出,因此会有一定的误差。当然,海洋环境数也可以通过海洋信息浮标来测量,其测量值较为准确,但其只能对雷达观察海域中的某一点进行测量,难以反映整个观察海域中其它区域的情况。因此,本试验中将二者相结合,雷达视野范围内的海洋环境数据主要通过海洋环境再分析数据给出,同时在雷达观察区域内分时在某几点上放置海洋信息浮标,对海洋环境数据进行修正,二者相结合给出较为准确的结果,辅助雷达对海探测试验。
雷达对海探测试验主要需记录风和浪等海洋环境要素信息,风要素的信息主要包括风力等级、风速、风向;浪要素信息主要包括浪高、浪向、波速、浪周期、温度等,此外,还有试验期间的天气现象、温度、相对湿度等。
风要素数据来源,是以全球气候预测系统再分析资料(Climate Forecast System Reanalysis,CFSR)为背景场,利用天气预报模式(Weather Research and Forecasting,WRF)中尺度模式及其3维变分同化(3-Dimensional VARiational,3DVAR)数据同化技术,同化了陆地、海洋及高空的各种常规和非常规气象观测资料,实现各种观测资料与再分析资料的动力融合。在此基础上,还利用中央气象台历史台风实况最佳路径资料,采用弱约束变分方法对动力融合的再分析风场进行调整,进一步提高数据精度。海面风场再分析资料集可覆盖西北太平洋区域(10°S~50°N,95°E~150°E),在每次试验中将根据试验地点经纬度抽取雷达观察海域的数据,用于辅助试验数据分析。风要素数据的空间分辨率为0.1°(经纬度),时间分辨率不低于1 h,经纬度格点风速误差在±1.5 m/s以内。
浪要素数据来源,是以全球气候预测系统再分析资料(CFSR)为驱动场,基于国家海洋环境预报中心优化后的第3代近岸海浪数值模式SWAN及最优插值同化技术,同化卫星高度计沿轨海浪有效波高资料,采用嵌套方法建立海浪再分析系统,形成覆盖西北太平洋区域(0°~50°N,100°E~160°E)高分辨率的海浪再分析资料集。与风要素数据获取方法相同,在每次试验中将根据试验地点经纬度抽取雷达观察海域的数据,用于辅助试验数据分析。浪风要素数据的空间分辨率为0.1°(经纬度),时间分辨率不低于1 h,经纬度格点浪高误差在0.3 m以内。示例数据如图10(a)–图10(d)所示,其中图10(a)和图10(c)中的“BUOY WS/ BUOY SWH”表示通过在海面布设浮标得到的风速/有效波高现场测试数据,“MODEL WS/ MODEL SWH”表示通过经纬度格点数据和数据建模得到的风速/有效波高再分析数据。
在获取上述数据的基础上,在试验实施过程中,还将采用海洋气象水文信息浮标对特定位置点处风和浪再分析数据进行修正。海洋气象水文信息浮标可实现对现场波浪潮汐等进行定点实时观测,具有测量精度高、布放维护简单等优势,如图11所示,测量参数包括浪高、浪周期、浪向、风速、风向、气温、气压、浮标位置坐标。
雷达对海上目标探测的试验,除需给出上述海洋环境信息之外,还需要同步获取海上目标的真实运动轨迹。对于中大型船只,可以通过船舶自动识别系统(Automatic Identification System,AIS)报文数据获取目标的位置、运动状态和尺寸信息;对于小型船只,则须开展配合试验(加装AIS设备或GPS/北斗定位设备)才能获取其真实运动轨迹。此外,对于海面非配合的目标(如作业的小型渔船、小型游艇等),则主要通过雷达显控终端观察和人工记录方式进行粗略标记(记录位置和时间),此类目标无法提供准确的位置信息作为真值使用。
4 典型数据展示与分析

图10 试验海域气象水文数据Fig.10 Meteorological and hydrological datas of the experimental sea area
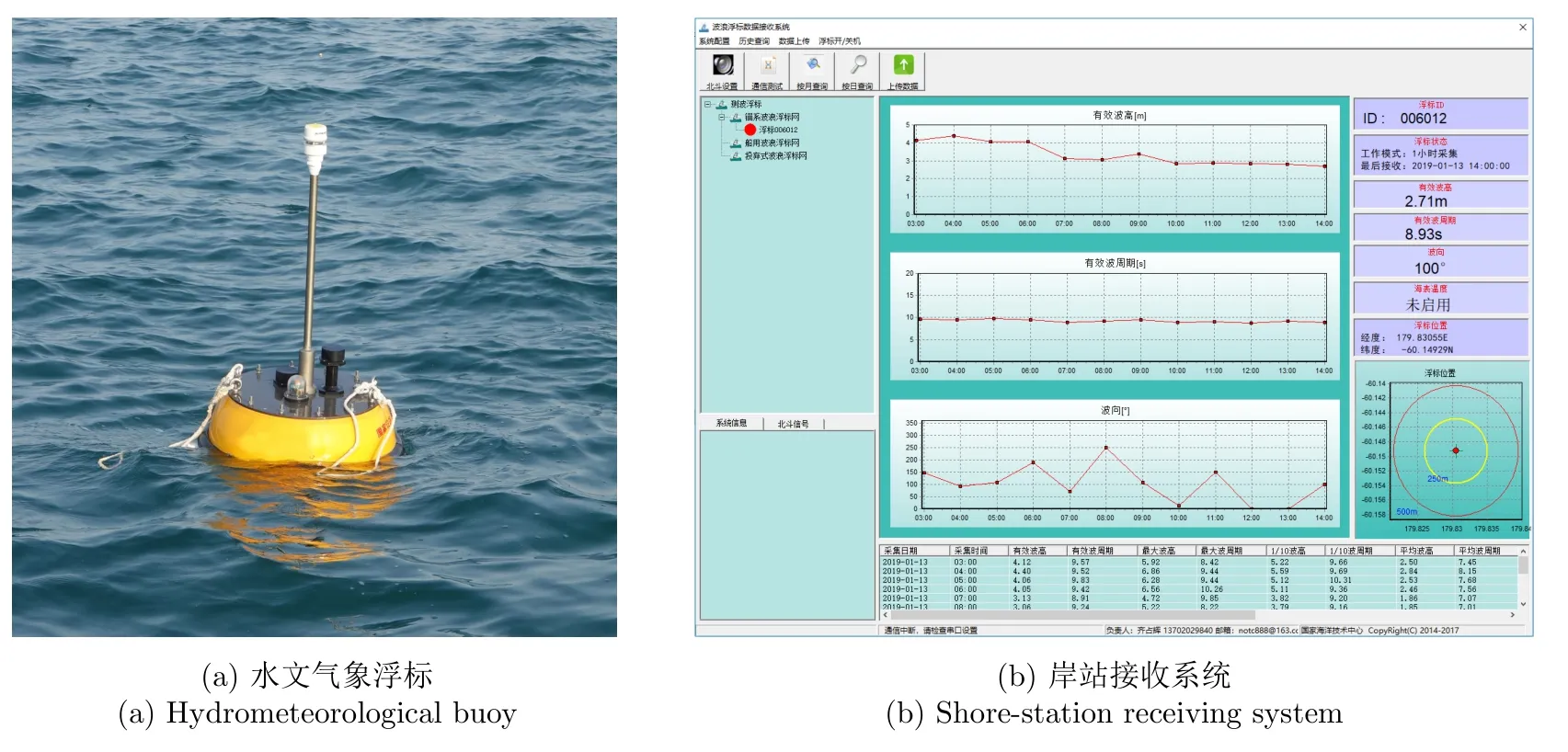
图11 海洋气象水文信息浮标Fig.11 Marine meteorological and hydrological information buoy
为说明数据有效性,本节从数据集中抽取一组典型海面测量数据,给出时域、频域处理结果。数据文件名为20191008085830_staring.mat,2019年10月8日8时58分30秒开始采集。数据采集时,雷达天线凝视海面某一方位,脉冲发射模式为图3中的模式2,即雷达每个触发相继发射2个不同的脉冲,其中第1个脉冲为单载频信号,发射脉宽40 ns,第2个脉冲为线性调频(Linear Frequency Modulation,LFM)信号,带宽25 MHz,脉冲重复频率(Pulse Repetition Frequency,PRF)为3 kHz,距离向采样率为60 MHz。本组数据目的是测量海杂波,观察时海面无合作目标,海面有效波高1.8~2.0 m,查询海况等级表[1,46]可知,属4级海况。图12(a)和图12(b)分别给出了单载频脉冲回波数据和LFM脉冲回波数据的时域2维平面图,该组数据共包含4096个脉冲,数据时长约为1.36 s,第1个脉冲的距离向回波采样点数为1436,第2个脉冲的距离向回波采样点数为6678,图中仅展示了杂波较强区域的数据,并未将所有距离单元的数据全部展示。图12(c)和图12(d)给出了图12(a)和图12(b)中3个距离单元回波序列的波形图,可知杂波能量随距离增加逐步降低。图12(e)和图12(f)分别给出了单载频脉冲回波数据和LFM脉冲回波数据的距离-频率2维平面图,图12(g)和图12(h)分别给出了多个距离单元的多普勒谱,可以发现多普勒谱中心为正值,表明海浪向雷达视线方向运动,单载频脉冲回波的距离-频率2维图中,某一些采样点处的杂波多普勒谱幅度很弱,这种现象与海浪起伏有关,并与单载频脉冲回波数据在数字解调后并未进行距离维匹配滤波也有关,若进行距离维匹配滤波处理,则多普勒谱必然会在距离维上展宽,从而覆盖所有的距离单元,结果会与LFM脉冲回波的距离-频率2维图类似。

图12 典型测量数据展示结果Fig.12 The results of typical measurements
通过多组数据分析发现,在雷达架高80 m左右,在3~4级海况条件下,雷达发射单载频脉冲时可以测量得到明显海杂波的距离不低于3 km,发射LFM脉冲时可以测量得到明显海杂波的距离不低于8 km。在低海况条件下,这一距离会有所减小,在高海况条件下,这一距离会有所增加。
5 总结
雷达对海上目标探测技术研发需雷达实测数据支持,鉴于军事及技术保密等原因,大多数雷达海杂波数据集均未公开,前期已公开的雷达对海探测数据目前已难以获取。针对这一问题,本文提出一项“雷达对海探测数据共享计划”,旨在利用X波段固态全相参雷达等多型雷达开展对海探测试验,获取不同海况等级、分辨率、擦地角条件下目标和海杂波数据,并同步获取海洋气象水文数据、目标位置与轨迹的真实数据,实现雷达实测数据的标准化、规范化管理,以此推进数据集的公开共享,为雷达对海探测领域关键技术攻关提供数据支持。
附录
X波段雷达对海探测实测数据的公开共享将依托雷达学报官方网站进行,试验数据于每次试验后上传至“数据/雷达对海探测数据”页面中(如附图1所示),具体网址为http://radars.ie.ac.cn/news/datasetofradardetectingsea.htm,数据将根据对海探测试验进度定期更新。
第1期试验以海杂波数据采集为主,兼顾海面目标(非合作目标)探测数据采集。由于试验采集数据量较大,不便于列出每一个数据文件,下面按海况等级给出每一类数据的概况,便于研发人员挑选与使用数据。

附图1 雷达对海探测数据发布地址App.Fig.1 Release address of sea-detecting radar data

附表1 雷达对海探测数据(第1期)概况表App.Tab.1 Summary table of sea-detecting radar data (the first phase)
每组数据的每个脉冲回波均包含数据头,数据头包含标志位、信息头长度、数据版本、脉冲重复周期、频率和计数、采样频率、数据来源与触发方式、方位码、数据丢失标志、波门开始时间和波门对应采样深度、UTC时间、雷达位置、雷达正北角、雷达工作模式、数据校验位等信息,在载入数据时,数据头包含的每位数据及对应的含义可一一对应呈现,以便于使用。
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
航天器工程(2022年3期)2022-07-12
今日农业(2021年19期)2022-01-12
红蜻蜓(2021年2期)2021-07-20
雷达与对抗(2020年2期)2020-12-25
舰船电子对抗(2020年5期)2020-11-26
火控雷达技术(2020年2期)2020-10-16
小学科学(2020年6期)2020-06-22
雷达与对抗(2020年1期)2020-06-05
辽河(2019年7期)2019-09-03
