
基于虚拟观测的CORS定位数据处理方法及应用
2019-11-12 02:10邰贺
全球定位系统 2019年5期
邰贺
(沈阳市勘察测绘研究院,辽宁 沈阳 110004)
0 引 言
目前,城市连续运行参考系统(CORS)已经成为城市现代测绘基准的重要组成部分[1],其提供的实时、高精度的定位服务成为智慧城市空间数据采集的重要手段[2].目前,城市级CORS基本以CORS+网络实时动态(RTK)的服务模式对外进行服务.目前,市场上的主流CORS技术有VRS、i-max、FKP等[3].
在CORS+RTK的实际使用过程中,经常发现流动站用户在作业过程中由于受到复杂环境[4](如无信号、高楼遮挡等)的影响,经常不能获得RTK固定解,导致无法作业[5].一般情况下,只能利用常规静态方法解决这种复杂环境下的控制点解算问题,但该方法耗时、耗力,造成项目的成本增加.因此,本文首先介绍了虚拟观测数据的生成原理,并提出了虚拟观测数据的数据质量评价指标,最后通过实际案例分析虚拟观测数据如何进行指标评价以及采用虚拟观测数据之后对于工程解算精度的改善情况.
1 虚拟观测数据的生成原理
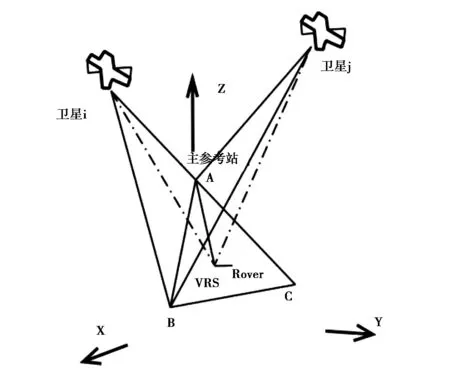
图1 虚拟观测定位示意图
如图1所示,参考站A、B、C构建起服务三角形,共视卫星i及卫星j;虚拟参考站V(VRS)、用户流动站U(rover)以及主参考站A之间有一定的距离.由于相位观测值表现为几何距离以及多种误差的和,在忽略轨道误差和多路径效应的影响下,就可以建立主参考站A与虚拟参考站V之间的观测方程(1)和(2):
λφAS=ρAS+c(ζtA-ζtS)-IAS+TAS-λNAS,
(1)
λφVS=ρVS+c(ζtV-ζtS)-IVS+TVS-λNVS.
(2)
分别将公式(1)和(2)在共视卫星上对(i,j)求差,得到公式(3)和(4):
λφAij=ΔρAij-c·Δζtij-ΔIAij+
ΔTAij-λNAij,
(3)
λφVij=ΔρVij-c·Δζtij-ΔIVij+
ΔTVij-λNVij.
(4)
再通过求差形成双差,得到公式(5):
ΔIAij)+(ΔTVij-ΔTAij)-
λ(NVij-NAij)
=Δ2ρAVij-Δ2IAVij+Δ2TAVij-
λΔ2NAVij,
(5)

由于唯一的未知量为虚拟参考站V上的单差观测值,因此可以得到虚拟参考站观测值的单差观测值的计算公式(6):
Δ2TAVij)-Δ2NAVij.
(6)
由于载波相位和伪距的双差观测方程如下:
λΔ2φ+λΔ2N=Δ2ρ-Δ2I+Δ2T+Δ2O+
Δ2M+ε,
(7)
Δ2P=Δ2ρ+Δ2I+Δ2T+Δ2O+Δ2M+ε.
(8)
如公式(7)和(8)所示,流动站位置的误差项中包含了大气误差、轨道误差、多路径效应以及接收机噪声在内的双差残差.就其对VRS观测结果影响大小来看,双差电离层延迟Δ2I、双差对流层延迟Δ2T以及双差轨道误差Δ2O的精确求解具有重要意义.
在确定了具体算法之后,以CORS站的精确坐标为基准,通过长时间的观测得到关于双差电离层延迟Δ2I、双差对流层延迟Δ2T以及双差轨道误差Δ2O的精确模型,进而根据该模型计算出单历元的误差值,并通过方程反推出虚拟参考站的单历元观测数据,进而形成虚拟观测数据.
2 虚拟观测数据质量评价指标
虚拟观测数据的质量直接影响着定位解算的精度和可靠性.本文参考了《GB/T 28588-2012 全球导航卫星系统连续运行基准站网技术规范》中关于基准站站址环境的评价指标,认为虚拟观测数据质量评价指标应包含卫星数量、多路径效应、周跳比、信噪比等[1].
2.1 卫星数量
卫星数量是指观测文件中记录的卫星总数.其主要通过TEQC等质量评估软件给出的SV数值进行体现.虚拟观测数据的可见卫星数量应与当前虚拟观测数据生成参与基站的共视卫星数量一致.
2.2 多路径效应
多路径效应是指接收机除直接收到卫星发射的信号外,还同时包含测站附近的物体表面
一次或者多次的反射信号,这种不同路径的信号与直接信号叠加,产生的时延效应成为多路径效应[6].多路径效应指标主要通过TEQC等质量评估软件给出MP1、MP2进行体现,理论上其不得小于0.5 m.
2.3 周跳比
周跳是接收机在连续工作的过程中由于信号干扰或者是信号受到遮挡等原因,造成接收机计时器的信号中断产生的整周相位跳变.周跳比指标为观测值总历元数量除以发生周跳的历元数量的比值,主要通过TEQC等质量评估软件给出的o/slps进行体现,其一般捆绑观测值完好性指标共同说明.一般情况下,周跳比越大越好,观测值完好性一般不低于85%.
2.4 信噪比
信噪比是载波的信号强度与噪声强度之比,是反映载波信号质量的指标之一.卫星信号的信噪比越高,说明卫星的信号强度越大.对实时观测的原始数据进行解析和呈现能够实时地表现原始数据的质量,是质量分析和判断的重要方面.信噪比一般通过RTKlib等软件给出的信噪比(SNR)进行体现,一般不低于45.
3 实例分析
本文选取2018年6月10日沈阳市卫星导航定位基准站网(SYCORS)[7]的FAHA站作为本次分析的参考测站,利用Trimble pivot软件在该站的真实坐标位置生成虚拟观测文件,使用TEQC最新版本以及RTKlib软件中的RTKplot数据质量分析软件[8]对虚拟观测数据的可见卫星数量、DOP、周跳比、多路径效应、SNR等质量指标进行分析,并与真实的观测数据进行对比.然后,选用沈阳市长青桥GNSS控制网项目进行实际工程验证,解算采用Trimble Business center软件,并采用cosaGPS V5.21版本进行平差.
3.1 可见卫星数量评价
将物理观测数据与虚拟观测数据的观测值经过TEQC解算,得到可见虚拟观测数据的卫星数量分布图2和物理观测数据的可见卫星数量分布图3.

图2 虚拟观测数据可见卫星数量
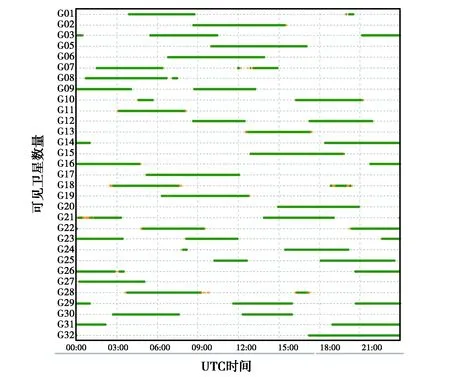
图3 物理观测数据可见卫星数量
由图2和图3对比可以看出,虚拟观测数据的可见卫星数量与物理观测数据的可见卫星数量基本相当,分布基本一致.经查验观测文件每个历元的卫星数量,与当前虚拟观测数据的生成参与基站的共视卫星数量一致.
3.2 多路径效应指标评价
经过TEQC解算出的虚拟观测数据的MP1、MP2与物理基站观测数据的MP1、MP2的对比如表1所示.

表1 多路径效应指标对比
可以看出,虚拟观测数据在多路径效应指标方面比物理观测数据指标上要好.
3.3 周跳比指标评价
经过TEQC解算出的虚拟观测数据与物理基站观测数据的周跳比以及观测值完好性的对比情况如表2所示.

表2 周跳比及观测值完好性对比
从表2可以看出,由于虚拟观测数据在CORS系统长期稳定运行之后基本不包含周跳信息,所以o/slps的数值明显大,而且观测值完好性比物理观测数据表现优异,几乎为100%.
3.4 信噪比指标评价
经过TEQC解算出的虚拟观测数据的SNR以及物理观测数据的SNR分别如图4及图5所示.
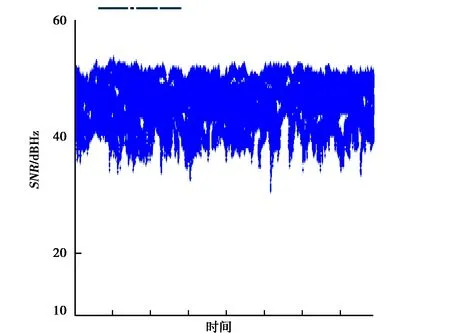
图4 虚拟观测数据SNR

图5 物理观测数据SNR
从图4和图5对比可以看出,虚拟观测数据的SNR与物理观测数据的SNR基本相当且分布基本一致,平均值均在50左右,大于45的指标,处于一个优秀的指标水平.
3.5 实际工程计算
本次计算采用两套方案:方案1采用项目测区最近的物理参考站作为控制,网型如图6所示;方案2采用测区周边1 km左右范围内生成虚拟基准站作为控制,网型如图7所示.方案1与方案2中,求取的坐标通过投影至N、E方向,精度比较也均在N、E分量上进行.
首先,比对两种方案对于基线长度的影响.由于商业软件采用单基线计算模型,其基线越短,形成基线的站点之间的相关度越高,对流层误差、电离层误差等的相关度也越高,基线解算的精度也就越高.按照方案1计算得到的控制网平均基线边长为12.015 km;按照方案计算得到的控制网平均基线边长为2.428 km,方案2比方案1的平均边长缩短5倍.
其次,比对两种方案对于基线解算精度的影响.无论物理基站或虚拟基站,其至临近最近未知点的基线共有4条,基站之间的基线共有6条,总计10条.这里不区分物理和虚拟,基准站以A-D顺序编号,未知点以1-4顺序编号.按照方案1和方案2分别进行同配置的基线解算,其解算精度如表3所示.

表3 基线解算精度表
可以看出,由于方案2的基线平均边长相比于方案1显著降低,导致了基线解算的精度相比于方案1要提高很多.
然后,比对三维约束平差后的定位精度情况.将基线解算的成果经过三维约束平差之后,其平差精度情况如表4所示.
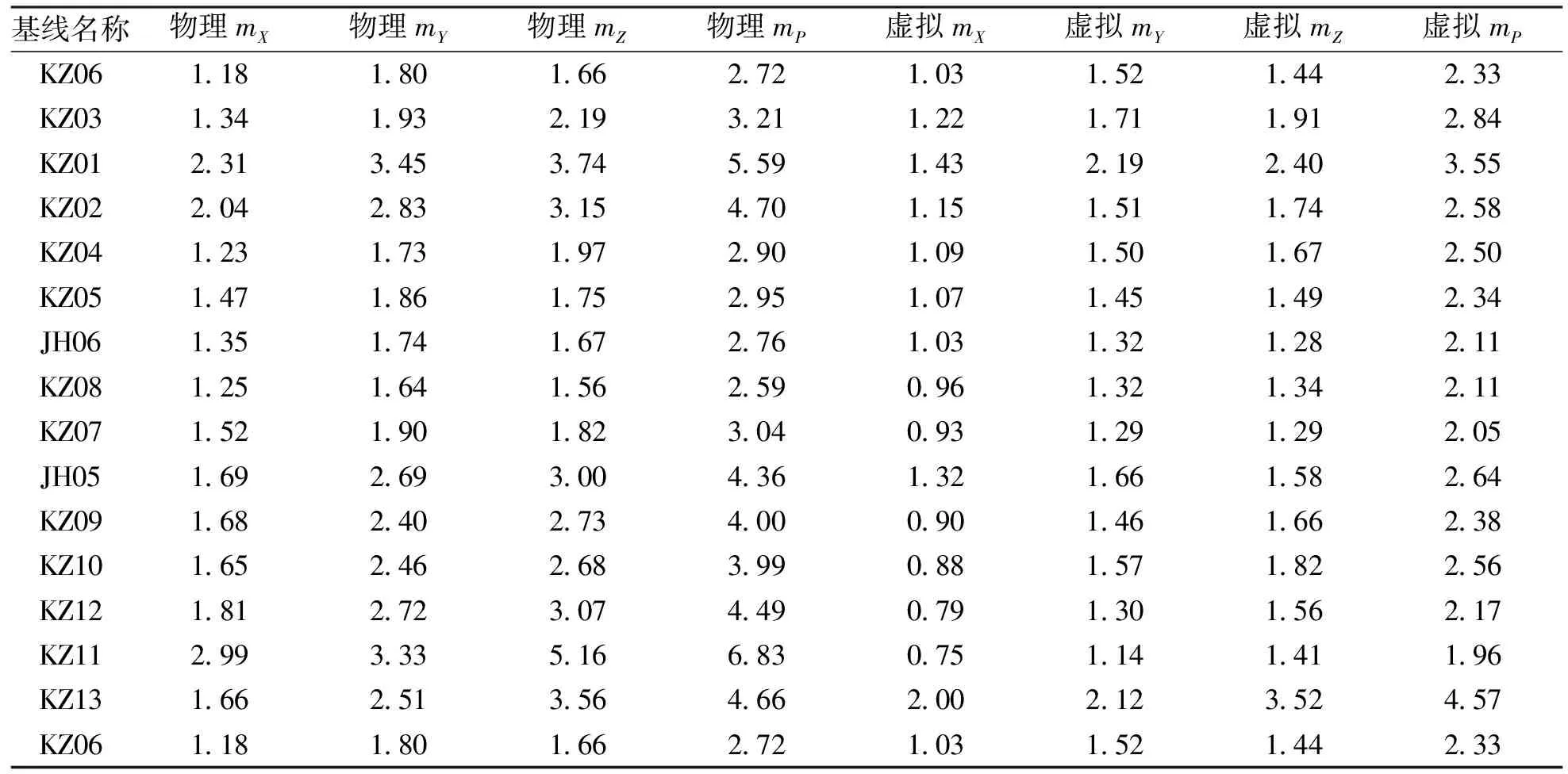
表4 约束平差精度表
从表4可以看出,三维约束平差后,方案2比方案1点位的三维精度要高.本项目中JH05、JH06两点为检核点位,其N、E坐标已知.将方案1和方案2的点位坐标成果与已知成果进行对比,情况如表5所示.

表5 检核点坐标精度对比表(仅保留小数位数)
表注:物-已表示物理站坐标减去已知点坐标,虚-已表示虚拟站坐标减去已知点坐标.因保密原因,这里仅表示小数位,小数点前面用*表示.
从表5可以看出,采用虚拟基站观测数据,其通过三维约束平差之后,已知点检核的精度成果要优于采用物理基站的成果,这主要是由于虚拟基站策略的基线平均长度短,解算精度高,基线残差小造成的.
4 应用条件
1)CORS站稳定运行
虚拟观测数据的生成需要依托于CORS站的长时间稳定运行.为保证生成精度,原则上CORS站稳定运行的时间不低于30天,且需要进行精度测试,采用的方法为与最近物理基站进行超短基线测试,基线三维分量残差在低于2 cm时可以使用.
2)平均站间距不宜过长
虚拟观测数据的质量与CORS站的平均站间距有关.站间距越小,误差建模的精度越高,其虚拟观测数据生成的精度也就越高.如果平均站间距过长,将导致误差模型建模精度下降,导致虚拟观测数据生成精度下降.一般情况下,平均站间距不宜超过50 km.
3)仅可用于平面控制
由于虚拟观测数据生成时的坐标是天线相位中心的平均坐标,且无法提供天线类型,这导致在三维处理中无法采用NGS等机构提供的绝对天线校正数据,仅能够采用软件自带的直接处理至相位中心的模式,导致高程U方向的结果无参照.实际应用时仅能用于平面控制和指标评定.
5 结束语
在城市级网络RTK的实际使用中,由于各种外界环境的影响,可能无法正常获取固定解.而虚拟观测数据这一技术手段,在求解未知控制点的应用中具有高精度、方便、低成本等优点,可以作为网络RTK技术的有益补充.同时,现有城镇化高速推进造成GNSS控制点标志被大量破坏,使用虚拟观测数据可在不用埋设控制点的情况下,完成GNSS控制网的设计、观测和处理,极大地降低了项目成本,具有很强的推广意义.
猜你喜欢
中国交通信息化(2022年8期)2022-11-20
北京航空航天大学学报(2022年8期)2022-08-31
导航定位学报(2022年4期)2022-08-16
中国新通信(2022年4期)2022-04-23
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2021年15期)2021-10-14
导航定位学报(2021年5期)2021-10-13
数字海洋与水下攻防(2020年5期)2021-01-04
恋爱婚姻家庭·青春(2019年9期)2019-12-10
恋爱婚姻家庭(2019年26期)2019-09-14
